机械臂速度控制方法、装置、计算机设备及存储介质与流程
本发明涉及机械臂控制领域,尤其涉及一种机械臂速度控制方法、装置、计算机设备及存储介质。
背景技术:
1、在实际口腔种植机械臂项目临床过程中,机械臂涉及一般以位置控制为主,控制机械臂位置移动,以达到机械臂主动跟随病人移动,从而达到诸如随动钻孔,随动跟随目标点等功能。对于传统的pid控制,需要进行多个参数的人为整定,在调参过程中,会因为参数选择不合适,从而引起控制器的跟踪误差变大,照成控制效果不稳定;且一般的位置响应过慢,实时性较差,在实际临床过程中可能产生不良后果。
技术实现思路
1、第一方面,本申请提供一种机械臂速度控制方法,包括:
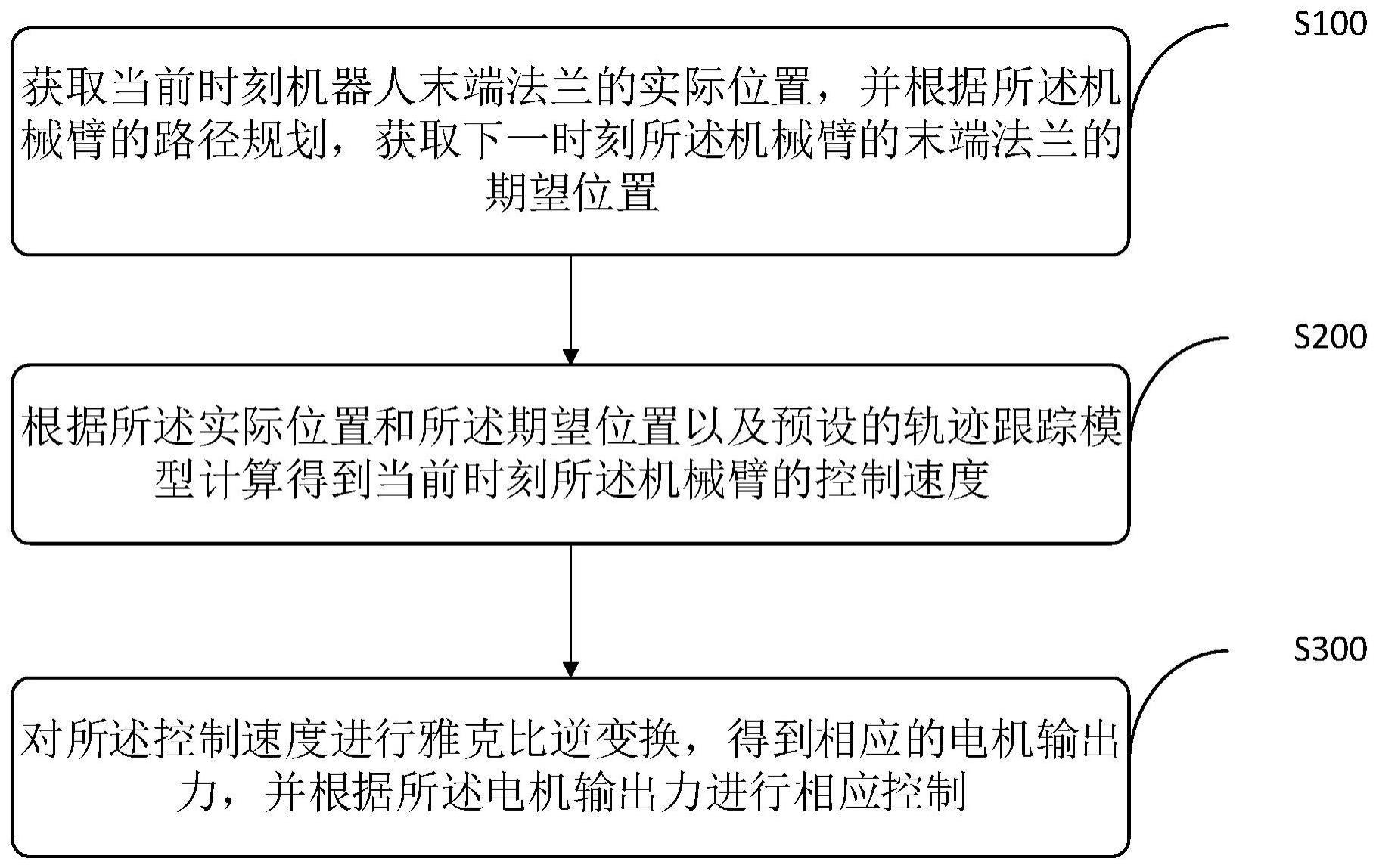
2、获取当前时刻机器人末端法兰的实际位置,并根据所述机械臂的路径规划,获取下一时刻所述机械臂的末端法兰的期望位置;
3、根据所述实际位置和所述期望位置以及预设的轨迹跟踪模型计算得到当前时刻所述机械臂的控制速度;
4、对所述控制速度进行雅克比逆变换,得到相应的电机输出力,并根据所述电机输出力进行相应控制。
5、进一步的,所述轨迹跟踪模型的建立方法包括:
6、获取所述机械臂的状态参数,建立跟踪误差方程,并根据所述状态参数,建立所述机械臂的运动方程;
7、根据李雅普诺夫稳定性判定条件,确定使得所述运动方程在所述跟踪误差方程收敛在0时的稳定条件,根据所述稳定条件,确定所述轨迹跟踪模型。
8、进一步的,所述获取所述机械臂的状态参数,包括:
9、确定所述状态参数是否有确切值;
10、若所述状态参数有确切值,则直接根据所述状态参数建立所述机械臂的运动方程;
11、若所述状态参数没有确切值,则建立所述状态参数的估计方程关系式,根据所述估计方程关系式,对所述状态参数进行参数化估计。
12、进一步的,所述估计方程关系式为:
13、
14、
15、
16、式中,为估计误差,a为所述状态参数,为估计的状态参数,为所述估计误差对时间的导,为所述状态参数对时间的导数,为所述估计的状态参数对时间的导数。
17、进一步的,所述轨迹跟踪模型表达式为:
18、
19、式中,u表示所述控制速度,为所述期望位置关于时间的导数,x为当前的位置,e为跟踪误差,k为通过整定得到的调节收敛速度的速度收敛参数。
20、进一步的,所述速度收敛参数的整定方法包括:
21、按照从小到大的顺序,将待整定的速度收敛参数输入所述跟踪模型中,并实时记录各个速度收敛参数对应的跟踪误差;
22、选取出使所述跟踪误差能够位于预设误差范围内的速度收敛参数区间作为整定后的速度收敛参数。
23、进一步的,所述获取当前时刻机器人末端法兰的实际位置,并根据所述机械臂的路径规划,获取下一时刻所述机械臂的末端法兰的期望位置,包括:
24、通过解析外部输入指令,确定所述机械臂的末端法兰的期望位置;
25、通过关节编码器获取所述机械臂各个关节的状态参数,对所述各个所述关节的状态参数进行正运动学解析,确定所述机械臂末端法兰的实际位置。
26、第二方面,本申请还提供一种机械臂速度控制装置,包括:
27、轨迹计算模块,用于获取当前时刻机器人末端法兰的实际位置,并根据所述机械臂的路径规划,获取下一时刻所述机械臂的末端法兰的期望位置;
28、跟踪计算模块,用于根据所述实际位置和所述期望位置以及预设的轨迹跟踪模型计算得到当前时刻所述机械臂的控制速度;
29、控制模块,用于对所述控制速度进行雅克比逆变换,得到相应的电机输出力,并根据所述电机输出力进行相应控制。
30、第三方面,本申请还提供一种计算机设备,包括处理器和存储器,所述存储器存储有计算机程序,所述计算机程序在所述处理器上运行时执行所述的机械臂速度控制方法。
31、第四方面,本申请还提供一种可读存储介质,其存储有计算机程序,所述计算机程序在处理器上运行时执行所述的机械臂速度控制方法。
32、本发明公开了一种机械臂速度控制方法、装置、计算机设备及存储介质,该方法包括:获取当前时刻机器人末端法兰的实际位置,并根据所述机械臂的路径规划,获取下一时刻所述机械臂的末端法兰的期望位置;根据所述实际位置和所述期望位置以及预设的轨迹跟踪模型计算得到当前时刻所述机械臂的控制速度;对所述控制速度进行雅克比逆变换,得到相应的电机输出力,并根据所述电机输出力进行相应控制。可以通过速度控制的方式控制机械臂的运动,提高了控制速度以及实时性,并减少控制误差。使得在临床场景中,机械臂能够更快的对指令进行反应,能给医生提供更好的手术控制反馈。
技术特征:
1.一种机械臂速度控制方法,其特征在于,包括:
2.根据权利要求1所述的机械臂速度控制方法,其特征在于,所述轨迹跟踪模型的建立方法包括:
3.根据权利要求2所述的机械臂速度控制方法,其特征在于,所述获取所述机械臂的状态参数,包括:
4.根据权利要求3所述的机械臂速度控制方法,其特征在于,
5.根据权利要求1所述的机械臂速度控制方法,其特征在于,所述轨迹跟踪模型表达式为:
6.根据权利要求5所述的机械臂速度控制方法,其特征在于,所述速度收敛参数的整定方法包括:
7.根据权利要求1所述的机械臂速度控制方法,其特征在于,所述获取当前时刻机器人末端法兰的实际位置,并根据所述机械臂的路径规划,获取下一时刻所述机械臂的末端法兰的期望位置,包括:
8.一种机械臂速度控制装置,其特征在于,包括:
9.一种计算机设备,其特征在于,包括处理器和存储器,所述存储器存储有计算机程序,所述计算机程序在所述处理器上运行时执行权利要求1至7中任一项所述的机械臂速度控制方法。
10.一种可读存储介质,其特征在于,其存储有计算机程序,所述计算机程序在处理器上运行时执行权利要求1至7中任一项所述的机械臂速度控制方法。
技术总结
本发明涉及机械臂控制领域,公开了一种机械臂速度控制方法、装置、计算机设备及存储介质,该方法包括:获取当前时刻机器人末端法兰的实际位置,并根据所述机械臂的路径规划,获取下一时刻所述机械臂的末端法兰的期望位置;根据所述实际位置和所述期望位置以及预设的轨迹跟踪模型计算得到当前时刻所述机械臂的控制速度;对所述控制速度进行雅克比逆变换,得到相应的电机输出力,并根据所述电机输出力进行相应控制。可以通过速度控制的方式控制机械臂的运动,提高了控制速度以及实时性,并减少控制误差。
技术研发人员:黄志俊,刘金勇,钱坤,陈鹏
受保护的技术使用者:杭州柳叶刀机器人有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!