工件夹持机械手及使用方法与流程
本申请实施例涉及机械手,尤其涉及一种工件夹持机械手及使用方法。
背景技术:
1、随着社会和经济飞速发展,汽车已然成为了生活中不可缺少的一部分。而汽车零部件是组成汽车的基本单元,在生产汽车零部件过程中,需要通过夹持机械手对零部件进行夹持,以将汽车零部件转移至指定点进行加工。
2、目前,汽车零部件的形状大多较为复杂,夹持机械手对汽车零件的夹持可能会发生松动的现象,另外夹持机械手一般是通过夹爪夹持于汽车零部件的某一局部,汽车零部件其他部位均位于夹爪的外侧,在夹持机械手转移汽车零部件的过程中,汽车零部件与夹持板之间容易因挤压出现偏移的情况,而发生脱落的现象,存在较大的安全隐患。
技术实现思路
1、为了解决上述问题,本申请实施例提供一种工件夹持机械手及使用方法,能够稳定夹紧工件。
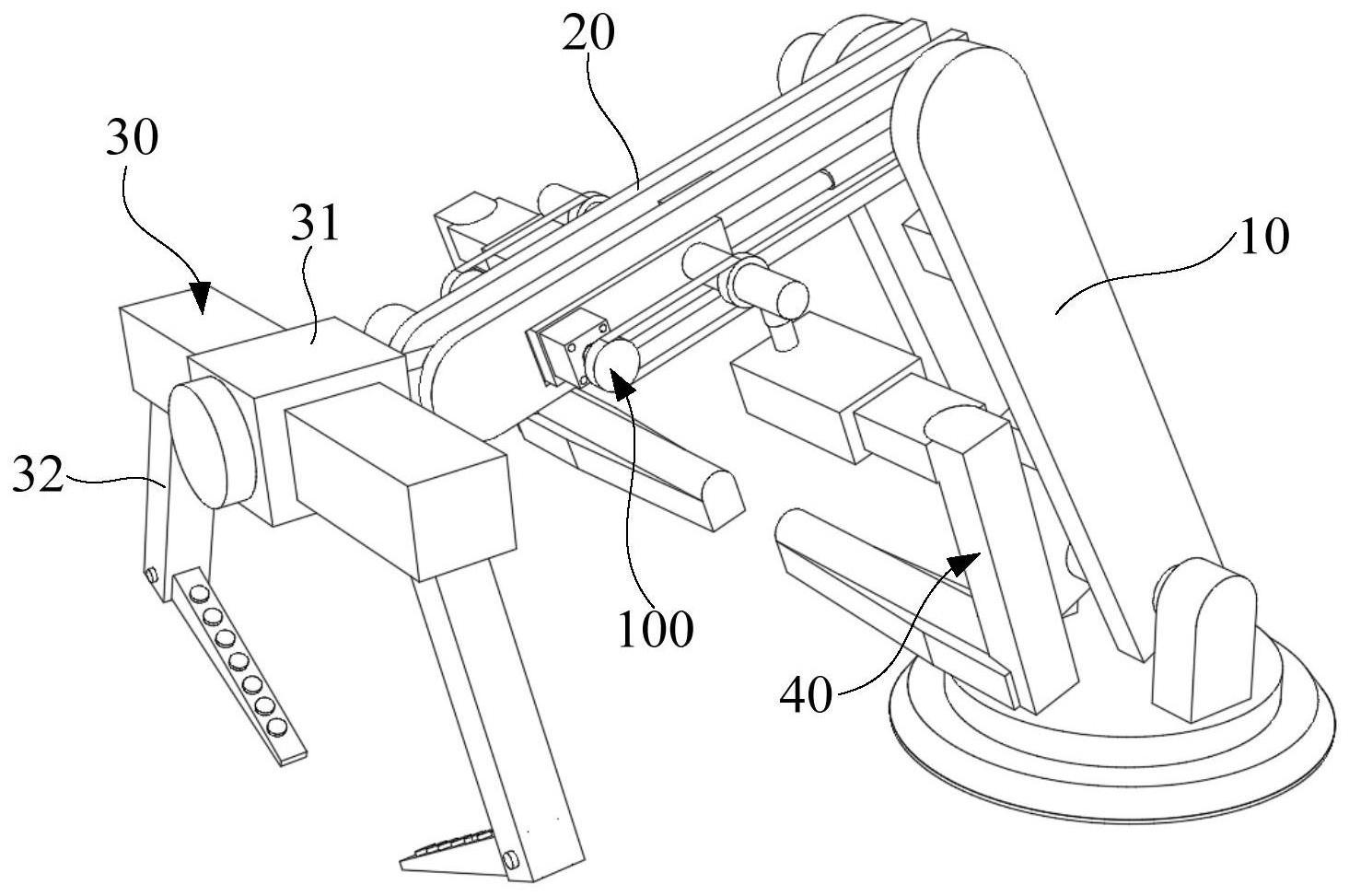
2、本申请实施例提供一种工件夹持机械手工装,包括:第一机械臂、第二机械臂、主夹紧机构、副夹紧机构及位置调节机构;所述第二机械臂的一端与所述第一机械臂的一端转动连接,所述主夹紧机构与所述第二机械臂远离所述第一机械臂的一端转动连接,所述副夹紧机构位于所述主夹紧机构与所述第一机械臂之间,所述位置调节机构设置在所述第二机械臂上,并与所述副夹紧机构连接,用于调节所述副夹紧机构与所述主夹紧机构之间的相对位置。
3、本申请提供的工件夹持机械手的有益效果在于:与现有技术相比,使用时,通过主夹紧机构与副夹紧机构之间的配合,对工件如汽车零部件的不同两个部位同时进行夹持,有效防止工件发生偏移,另外,在夹紧工件过程中,通过位置调节机构调节副夹紧机构与主夹紧机构之间的相对位置,以适应不同类型的工件,有利于提高工件夹持机械手对工件夹持的稳定性,从而有效防止在转移工件过程中,发生工件松动或脱落的现象,有利于保证安全性。
4、在其中一个实施例中,所述位置调节机构包括第一调节组件,所述第一调节组件设置在所述第二机械臂上,并与所述副夹紧机构连接,所述第一调节组件用于带动所述副夹紧机构沿所述第二机械臂的长度方向运动。
5、在其中一个实施例中,所述第二机械臂上设有滑槽,所述滑槽沿所述第二机械臂的长度方向延伸,所述第一调节组件包括滑块及弹性件,所述滑块滑动设置在相应的滑槽内,并与所述副夹紧机构连接,所述弹性件活动设置在所述滑槽内,并与所述滑块连接。
6、在其中一个实施例中,所述第一调节组件还包括固定筒及连接杆,所述固定筒设置在所述滑槽内,所述弹性件收容于所述固定筒内,所述连接杆的两端分别与所述滑块及所述弹性件连接。
7、在其中一个实施例中,所述位置调节机构还包括第二调节组件,所述第二调节组件连接于所述第一调节组件与所述副夹紧机构之间,所述第二调节组件用于控制所述副夹紧机构相对所述主夹紧机构摆动。
8、在其中一个实施例中,所述第二调节组件包括旋转驱动件、主轴、主链轮、从链轮及链条,所述旋转驱动件设置在滑块上,所述主轴可转动地设置在所述滑块上,并与所述副夹紧机构连接,所述主链轮设置在所述旋转驱动件上,所述从链轮设置在所述主轴上,所述链条绕设在所述主链轮和所述从链轮上。
9、在其中一个实施例中,所述位置调节机构还包括第三调节组件,所述第三调节组件连接于所述第二调节组件与所述副夹紧机构之间,所述第三调节组件用于调节所述副夹紧机构的高度。
10、在其中一个实施例中,还包括第一旋转驱动机构及第二旋转驱动机构,所述第一旋转驱动机构设置在所述第一机械臂上,并与所述第二机械臂连接,所述第一旋转驱动机构用于驱动所述第二机械臂相对所述第一机械臂旋转;所述第二旋转驱动机构设置在所述第二机械臂上,并与所述主夹紧机构连接,所述第二旋转驱动机构用于驱动所述主夹紧机构相对所述第二机械臂旋转。
11、在其中一个实施例中,还包括转盘及第三旋转驱动机构,所述第三旋转驱动机构设置在所述转盘上,并与所述第一机械臂连接,所述第三旋转驱动机构用于驱动所述第一机械臂相对所述转盘旋转。
12、在其中一个实施例中,所述主夹紧机构包括第一气缸及两个主夹爪,所述第一气缸上连接有转接块,所述转接块与所述第二机械臂远离所述第一机械臂的一端连接,两个所述主夹爪均与所述第一气缸连接,所述第一气缸用于驱动两个所述主夹爪相互靠近或远离。
13、在其中一个实施例中,各所述副夹爪包括第二气缸及夹杆,两个所述副夹爪的所述夹杆相对设置,所述第二气缸用于驱动所述夹杆靠近或远离另一个所述夹杆。
14、在其中一个实施例中,第一旋转驱动机构包括第一旋转轴及第一旋转驱动器,第一旋转轴活动插设于第一机械臂的两个第一连接块,第二机械臂的一端设于两个第一连接块之间,并与第一旋转轴固定连接,第一旋转驱动器设置在第一机械臂的一个第一连接块上,并与第一旋转轴连接。
15、在其中一个实施例中,第二旋转驱动机构包括第二旋转轴及第二旋转驱动器,第二旋转轴活动插设于第二机械臂的两个第二连接块,转接块的部分设于两个第二连接块之间,并与第二旋转轴固定连接,第二旋转驱动器设置在第二机械臂的一个第二连接块上,并与第二旋转轴连接。
16、在其中一个实施例中,转盘上设置有两个固定座,两个固定座相对间隔设置,第三旋转驱动机构包括第三旋转轴及第三旋转驱动器,第三旋转轴活动穿设在两个固座座上,第一机械臂远离第二机械臂的一端设于两个固定座之间,并与第三旋转轴连接,第三旋转驱动器与第三旋转轴的一端连接。
17、本申请还提供一种工件夹持机械手的使用方法,采用上述任意一项所述的工件夹持机械手,包括以下步骤:
18、基于工件的类型及位置,控制所述第一机械臂、所述第二机械臂及所述主夹紧机构中的至少一个运动,以使所述主夹紧机构达到第一目标夹持位置;控制调节机构调节副夹紧机构与主夹紧机构之间的相对位置,以使副夹紧机构达到第二目标夹持位置;
19、所述主夹紧机构与所述副夹紧机构分别夹紧于工件的不同两个部位。
20、本申请实施例提供的工件夹持机械手的使用方法的有益效果在于:与现有技术相比,使用时,通过主夹紧机构与副夹紧机构之间的配合,对工件如汽车零部件的不同两个部位同时进行夹持,有效防止工件发生偏移,另外,在夹紧工件过程中,通过位置调节机构调节副夹紧机构与主夹紧机构之间的相对位置,以适应不同类型的工件,有利于提高工件夹持机械手对工件夹持的稳定性,从而有效防止在转移工件过程中,发生工件松动或脱落的现象,有利于保证安全性。
技术特征:
1.一种工件夹持机械手,其特征在于,包括:第一机械臂、第二机械臂、主夹紧机构、副夹紧机构及位置调节机构;所述第二机械臂的一端与所述第一机械臂的一端转动连接,所述主夹紧机构与所述第二机械臂远离所述第一机械臂的一端转动连接,所述副夹紧机构位于所述主夹紧机构与所述第一机械臂之间,所述位置调节机构设置在所述第二机械臂上,并与所述副夹紧机构连接,用于调节所述副夹紧机构与所述主夹紧机构之间的相对位置。
2.根据权利要求1所述的工件夹持机械手,其特征在于,所述位置调节机构包括第一调节组件,所述第一调节组件设置在所述第二机械臂上,并与所述副夹紧机构连接,所述第一调节组件用于带动所述副夹紧机构沿所述第二机械臂的长度方向运动。
3.根据权利要求2所述的工件夹持机械手,其特征在于,所述第二机械臂上设有滑槽,所述滑槽沿所述第二机械臂的长度方向延伸,所述第一调节组件包括滑块及弹性件,所述滑块滑动设置在相应的滑槽内,并与所述副夹紧机构连接,所述弹性件活动设置在所述滑槽内,并与所述滑块连接。
4.根据权利要求3所述的工件夹持机械手,其特征在于,所述第一调节组件还包括固定筒及连接杆,所述固定筒设置在所述滑槽内,所述弹性件收容于所述固定筒内,所述连接杆的两端分别与所述滑块及所述弹性件连接。
5.根据权利要求2所述的工件夹持机械手,其特征在于,所述位置调节机构还包括第二调节组件,所述第二调节组件连接于所述第一调节组件与所述副夹紧机构之间,所述第二调节组件用于控制所述副夹紧机构相对所述主夹紧机构摆动。
6.根据权利要求5所述的工件夹持机械手,其特征在于,所述第二调节组件包括旋转驱动件、主轴、主链轮、从链轮及链条,所述旋转驱动件设置在滑块上,所述主轴可转动地设置在所述滑块上,并与所述副夹紧机构连接,所述主链轮设置在所述旋转驱动件上,所述从链轮设置在所述主轴上,所述链条绕设在所述主链轮和所述从链轮上。
7.根据权利要求5所述的工件夹持机械手,其特征在于,所述位置调节机构还包括第三调节组件,所述第三调节组件连接于所述第二调节组件与所述副夹紧机构之间,所述第三调节组件用于调节所述副夹紧机构的高度。
8.根据权利要求1-7任意一项所述的工件夹持机械手,其特征在于,还包括第一旋转驱动机构及第二旋转驱动机构,所述第一旋转驱动机构设置在所述第一机械臂上,并与所述第二机械臂连接,所述第一旋转驱动机构用于驱动所述第二机械臂相对所述第一机械臂旋转;所述第二旋转驱动机构设置在所述第二机械臂上,并与所述主夹紧机构连接,所述第二旋转驱动机构用于驱动所述主夹紧机构相对所述第二机械臂旋转。
9.根据权利要求1-7任意一项所述的工件夹持机械手,其特征在于,还包括转盘及第三旋转驱动机构,所述第三旋转驱动机构设置在所述转盘上,并与所述第一机械臂连接,所述第三旋转驱动机构用于驱动所述第一机械臂相对所述转盘旋转。
10.一种工件夹持机械手的使用方法,采用如权利要求1-10任意一项所述的工件夹持机械手,其特征在于,包括以下步骤:
技术总结
本申请实施例涉及机械手技术领域,公开了一种工件夹持机械手及使用方法,该工件夹持机械手包括:第一机械臂、第二机械臂、主夹紧机构、副夹紧机构及位置调节机构;主夹紧机构与第二机械臂远离第一机械臂的一端转动连接,副夹紧机构位于主夹紧机构与第一机械臂之间,位置调节机构设置在第二机械臂上,并与副夹紧机构连接,用于调节副夹紧机构与主夹紧机构之间的相对位置。该工件夹持机械手的使用方法,采用上述工件夹持机械手对工件进行夹持。通过主夹紧机构与副夹紧机构之间的配合,对工件的不同两个部位同时进行夹持,有效防止工件发生偏移,通过位置调节机构调节副夹紧机构与主夹紧机构之间的相对位置,以适应不同类型的工件。
技术研发人员:李亮
受保护的技术使用者:阿维塔科技(重庆)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!