用于机器人手爪的柔性触觉传感系统及其制备方法
本发明涉及智能机器人,具体涉及一种用于机器人手爪的柔性触觉传感系统及其制备方法。
背景技术:
1、空间机器人多指手抓取和操作的研究已经成为当今科技领域中一个重要的研究课题。经过近二十多年的深入研究,在多指手的设计、抓取综合、多指运动学及控制等领域,取得了诸多进展。然而,为了其能够在存在着不确定性的环境下进行灵巧的操作,其手爪必须具有很强的感知能力,即配置触觉传感器系统。机器人手爪通过这些传感器来获得环境信息,以实现快速、准确、柔顺地触摸、抓取和操作工件。为了实现柔性触觉传感器的高传感性能,在传感器设计中引入多级微纳结构是提升器件性能的有效手段。
2、对于柔性触觉传感系统中系统电源而言,即太阳能电池,表面的光线反射是限制其性能的关键因素,因而通常在表面制备微纳结构以增强太阳能电池陷光性,提高其对光生载流子的收集能力。然而,目前多级微纳结构的制备通常涉及到复杂的工艺流程、严苛的实验条件及高昂的制造成本,这些问题极大的限制了它们的实际应用。
技术实现思路
1、鉴于上述技术问题,本发明的目的在于提出一种用于机器人手爪的柔性触觉传感系统及其制备方法,以便解决上述问题的至少之一。
2、其提供的新型柔性触觉传感系统由用于触觉感知的多丝微结构化柔性压力传感器及用于系统电源的光丝烧蚀石墨烯/硅太阳能电池组成。基于多丝微纳加工技术实现多丝微结构化柔性压力传感器的高效快速大面积制备,采用共混法实现激光诱导石墨烯/pedot:pss导电油墨的制备以用于导电材料。基于飞秒激光光丝远程微纳加工技术实现光丝烧蚀石墨烯/硅太阳能电池抗反射蜂窝状微结构的制备,并在激光辐照之前表面镀覆一层铝膜,以降低太阳能电池的光线反射率。该新型柔性触觉传感系统基于自身具有优异的传感性能、较高的光电转换效率以及低制备成本低的优势在智能机器人传感领域具有巨大的应用潜力以及诱人的发展前景。
3、为实现上述目的,本发明具体采取如下技术方案:
4、一种用于机器人手爪的柔性触觉传感系统,其特征在于,包括:相连接的用于触觉感知的多丝微结构化柔性压力传感器以及用于系统电源的光丝烧蚀石墨烯/硅太阳能电池。
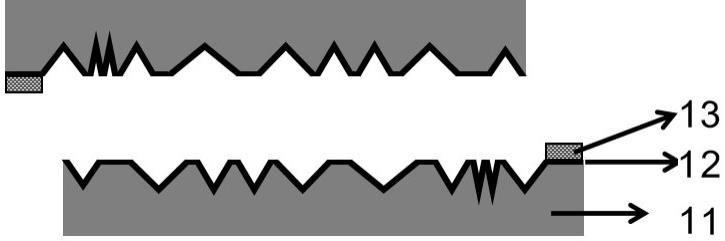
5、进一步地,所述多丝微结构化柔性压力传感器为采用两层激光诱导石墨烯/pedot:pss/pdms薄膜面对面组装形成的对电极式多丝微结构化柔性压力传感器;所述激光诱导石墨烯/pedot:pss/pdms薄膜从下到上由:多丝微结构化pdms薄膜(11)、激光诱导石墨烯/pedot:pss导电油墨层(12)、以及位于激光诱导石墨烯/pedot:pss导电油墨层(12)边沿的银导电油墨层(13)组成。
6、进一步地,所述光丝烧蚀石墨烯/硅太阳能电池采用硅衬底(22),所述硅衬底(22)的中心窗口处为光丝烧蚀蜂窝状微结构;所述光丝烧蚀蜂窝状微结构上覆盖有石墨烯薄膜(25),周部设有导电银浆层(24)作为前电极;所述硅衬底(22)的背面设有铟镓共晶合金层(21)作为后电极。
7、进一步地,所述硅衬底的尺寸为1.5cm×1.5cm,所述中心窗口的尺寸为4.5mm×4.5mm。
8、进一步地,所述光丝烧蚀蜂窝状微结构为镀覆铝膜后在激光辐照下烧蚀形成。
9、进一步地,所述铝膜的厚度为200nm。
10、进一步地,所述多丝微结构化柔性压力传感器基于多丝微纳加工技术实现微结构的制备,导电材料为激光诱导石墨烯/pedot:pss导电油墨。
11、进一步地,所述光丝烧蚀石墨烯/硅太阳能电池基于飞秒激光光丝远程微纳加工技术实现抗反射蜂窝状微结构的制备,并在激光辐照之前在硅衬底表面镀覆一层铝膜,用于降低太阳能电池的光线反射率。
12、作为优选,所述飞秒激光光丝远程微纳加工技术中,激光脉冲中心波长为800nm,重复频率为100-1000hz,脉宽为45fs,经过焦距为2m的平凸透镜在空气中聚焦,基于非线性大气成丝形成百tw/cm2高强度激光脉冲。
13、进一步地,所述多丝微结构化柔性压力传感器制备过程包括以下步骤:
14、步骤a1:将清洗后的聚酰亚胺薄膜放置在位移平台上,利用二氧化碳激光器按照预先编好的图案对样品表面进行雕刻,生成黑色的3d多孔石墨烯泡沫,即激光诱导石墨烯;
15、步骤a2:将激光诱导石墨烯从pi薄膜刮下清洗干燥,置于无水乙醇中进行超声分散,后将pedot:pss溶液滴入激光诱导石墨烯/无水乙醇分散液中搅拌分散,得到激光诱导石墨烯/pedot:pss导电油墨;
16、步骤a3:将pdms的主剂与固化剂按照质量比10:1的比例混合搅拌,抽真空后置于多丝烧蚀硅模具上,翻模得到微结构化pdms薄膜;
17、步骤a4:采用喷涂方式在微结构化pdms表面涂覆激光诱导石墨烯/pedot:pss导电油墨,将两层制备好的激光诱导石墨烯/pedot:pss/pdms薄膜面对面组装对电极式多丝微结构化柔性压力传感器。
18、进一步地,所述光丝烧蚀石墨烯/硅太阳能电池制备过程包括以下步骤:
19、步骤b1:将尺寸为1.5cm×1.5cm的硅片依次放入丙酮、无水乙醇以及去离子水中进行超声清洗,将清洗后的硅片采用聚酰亚胺胶带包裹,中心留下4.5mm×4.5mm的窗口,利用控溅射技术溅射一层厚度为200nm的铝膜;
20、步骤b2:通过激光将铝薄膜覆盖的硅片制备形成硅片表面蜂窝状微结构;
21、步骤b3:在70℃下,利用氢氧化钾溶液对具有蜂窝状微结构的硅衬底进行平滑处理,后在5%的氢氟酸中放置1-3min以除去硅片中心窗口表面的氧化层,清洗干燥后备用;
22、步骤b4:将清洗后的由环十二烷支撑保护的石墨烯膜转移到平滑处理的具有蜂窝状微结构的硅衬底上,在380℃真空条件下退火处理20min;
23、步骤b5:在硅片中心窗口周围石墨烯表面丝网印刷导电银浆作为太阳能电池前电极,丝网印刷铟镓共晶合金以作为后电极。
24、作为优选,在步骤b2中,将铝薄膜覆盖的硅片放置在电脑控制三维位移平台上,通过编写visual studio程序控制扫描振镜系统中镜片的偏转,进而调控百tw/cm2高强度激光运动的轨迹及速度,从而实现硅片表面蜂窝状微结构的制备。
25、相比于现有技术,本发明及其优选方案至少具有以下有益效果:
26、(1)多丝微结构化柔性压力传感器具有的微纳结构可以有效改善器件的传感性能。
27、(2)光丝烧蚀石墨烯/硅太阳能电池表面具有的蜂窝状微纳米结构可以有效增加入射光的传播路径及吸收表面积,注入的铝元素可以引起样品能带结构的改变,即有效增强硅片表面的陷光性,提高太阳能电池对光生载流子的收集能力。
28、(3)基于多丝微纳加工技术及飞秒激光光丝远程微纳加工技术具有远程、快速、可大面积加工的优势,可以实现多丝微结构化柔性压力传感器及光丝烧蚀石墨烯/硅太阳能电池的高效制备,从而大幅度降低柔性触觉传感系统的制备成本。
- 还没有人留言评论。精彩留言会获得点赞!