一种新型柔性液压机械臂系统多体动力学建模方法
本发明涉及液压机械臂的控制,特别涉及一种新型柔性液压机械臂系统多体动力学建模方法。
背景技术:
1、柔性液压机械臂系统是一个由液压缸驱动的液固耦合的具有柔性变形的串联机械臂系统。液压机械臂适用于建筑、电力、核工业、海洋工程、应急救援等领域的急难险重的恶劣工作环境,具有重量轻、负载比大、运动速度快、耗能少等突出优点。
2、实际的机械臂架振动与控制涉及到机械、液压、控制等多个交叉学科,其固液耦合动力学模型与振动控制非常复杂,而弹性振动主动阻尼控制策略、轨迹规划等研究工作都需要基于精准的动力学模型。目前,众多研究中大多只考虑了某些特定自由度柔性臂的动力学建模,并且在实际计算动力学模型的过程中仍然很复杂且计算效率很低。
3、本发明所述机械系统建模方法在应用假设模态法思想的传统机械系统拉格朗日动力学建模法的基础上进行改进,先对不同机械结构的臂杆进行等效简化,再对简化后的臂杆选取合适的基函数,进而运用拉格朗日动力学建模法对机械系统进行建模。
技术实现思路
1、本发明的目的是提供一种新型柔性液压机械臂系统多体动力学建模方法,以解决现有技术中存在的上述不足,特别是针对液固耦合的平面串联机械臂系统的多体动力学建模问题。对臂杆进行等效简化后采用假设模态法对简化后机械系统臂架选取基函数,并构建基函数组;采用刚柔虚拟分离法将柔性臂架分解为假想的刚性部分和柔性部分并分别处理,以精简计算提高效率;应用拉格朗日建模法整理为系统多体动力学模型。本建模方法求解计算量小,精度高,推导思路清晰,具备很好的可移植性。
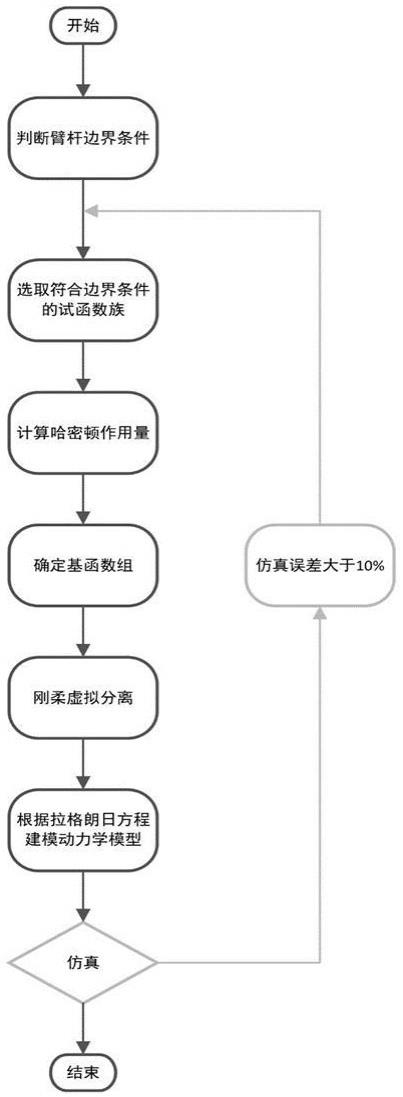
2、为达到上述目的,本发明提供的一种新型柔性液压机械臂系统多体动力学建模方法,该方法包括以下步骤:
3、s1、根据机械臂各臂杆的不同机械结构分别等效简化为常见梁类型中如悬臂梁和简支梁等或不同类型梁的组合;
4、s2、按照机械臂各臂杆的实际结构判断其工作状态下挠曲形态及曲率变化,选取能够近似描述其形变的函数类型,并根据瑞利-里兹法分别推导不同结构臂架的具体基函数;
5、s3、根据最小势能原理,当势能最小时,系统处于稳定状态则计算所得臂杆挠度为此瞬时稳态下的稳定值;根据哈密顿原理,求臂杆哈密顿作用量,并计算得出特征向量代入基函数组;
6、s4、通过基函数与模态角方程的共同计算求得臂杆各处的模态坐标,进一步可得臂杆的实际挠度,对各臂杆挠度进行叠加计算;
7、s5、采用刚柔虚拟分离的思想将柔性臂分解为假想的刚性部分和柔性部分并分别处理;
8、s6、对柔性变形情况下机械臂的液压驱动力及驱动力矩进行推导计算;
9、s7、推导柔性液压机械臂系统数学模型:根据拉格朗日动力学建模法,将液压机械臂各臂杆的位置矢量、速度矢量等描述量整合进拉格朗日方程中,推导完整系统数学模型,并进行系统动力学建模、分析。
10、优选地,所述的柔性液压机械臂为液压驱动的具有柔性变形的固液耦合的平面多连杆串联机器臂。本发明以平面串联三连杆柔性液压机械臂为示例,对此系统进行建模。
11、优选地,所述步骤s1中,根据臂杆实际机构分别等效简化为不同类型梁架,对示例臂杆进行简化等效,其中臂杆一等效为悬臂梁,臂杆二等效为简支梁和悬臂梁的组合,臂杆三等效为悬臂梁;特别地,臂杆一上与液压杆铰接点的前端部分长度相对于整个臂杆而言实际长度很短,产生的挠度变形对整体挠度的影响做近似计算反而会产生干扰,故而忽略不计,假想为刚性部件。
12、优选地,所述步骤s2中,对于机械臂系统,臂杆基函数所需要满足的几何边界条件如下:
13、,
14、满足边界条件的基于瑞利-里兹方法的臂杆一的基函数:
15、,
16、选取完整的前阶模态叠加的函数作为基函数对于系统整体计算而言过于繁复,在精确度方面带来的提升却微乎其微,因此选取对整体影响较大的前两阶模态叠加作为臂杆基函数,
17、,
18、其中为臂杆一铰接点前的长度;
19、整个臂架末端的最后一节臂杆可以简化为典型的悬臂梁结构,同样只需选取前两阶模态叠加作为基函数,既可满足精度要求又大大提升计算效率;
20、本发明示例为平面串联三连杆柔性液压机械臂系统,其基函数组如下:
21、。
22、优选地,所述步骤s3中,臂杆一的哈密顿作用量可表示为:
23、,
24、定义变量为:
25、,
26、以矩阵形式表示哈密顿作用为:
27、,
28、求解基函数的近似解转化为求解参数问题,即求解。每个参数具有非零解的充要条件是其系数行列式为零,
29、,
30、因此,可以得到n个特征值和对应的特征向量为,,并将代入基函数组便于后续计算代换。
31、优选地,所述步骤s5中,对臂杆进行刚柔虚拟分解。平面串联机械臂系统挠度变化主要体现在竖直方向,因此假想在随动坐标系为轴为柔性臂的虚拟刚性部分,轴为柔性部分。分别对虚拟刚性运动的广义坐标和柔性变形的广义坐标进行分析,得到虚拟刚性臂旋转关节耦合项及反应柔性臂的变形及变形快慢的耦合项、;
32、刚性关节耦合项:
33、,
34、柔性变形耦合项:
35、,
36、其中为臂杆的惯性矩阵,和为臂杆的变形和变形快慢的耦合效应。
37、优选地,所述步骤s6中,忽略阀芯和液压缸外泄漏对刚体的影响,假设液压缸内油压相同,忽略管道内摩擦损失。液压缸活塞的运动方程为:
38、,
39、令,则液压缸驱动力方程为:
40、,
41、设、分别设为液压缸与相邻两臂杆的铰接点,,。则液压缸1在臂杆1与底座之间的位置向量可表示为:
42、,
43、求导后得到液压缸1的速度矢量和加速度矢量:
44、,
45、同理,液压缸2和3的位置向量分别为:
46、,
47、同理,可得到液压缸二和三的速度矢量和加速度矢量。将上述液压缸位置、速度、加速度矢量方程代入液压缸驱动力方程中,可得:
48、,
49、则柔性液压机械臂液压缸驱动力矩表示为:
50、。
51、优选地,所述步骤s7中,对柔性臂架的动能、重力势能、弹性势能进行求解,如下表示:
52、,
53、其中,动能为,重力势能为,变形存储的弹性势能为;
54、定义柔性机械臂拉格朗日函数:
55、,
56、选取广义坐标,其中,,根据拉格朗日方程
57、,
58、其中,为广义速度,为广义力矩;
59、经过运算整理后,矩阵形式柔性液压机械臂系统多体动力学方程:
60、,
61、优选地,所述步骤s7中,通过mathematica科学计算软件推导柔性液压机械臂系统的动力学数学模型,并通过matlab模拟仿真软件进行数据仿真。
62、与现有技术相比,本发明的有益效果为:(1)本发明提出了一种以假设模态法为基础的多基函数组合的柔性液压机械臂系统多体动力学建模方法,分别等效简化各臂杆机械结构,根据简化后结构选取贴合的基函数进行适当组合以描述柔性臂杆的挠曲变形,提高了柔性液压机械臂系统动力学建模的可靠性、准确性;(2)本发明采用刚柔虚拟分离的思想将柔性臂分解为假想的刚性部分和柔性部分并分别处理,减少非必要耦合计算以达到精简计算提高效率的目的;(3)本发明的建模方法中刚柔耦合机械臂的柔性特征只体现在、以及等耦合项中,因此针对不同类型的平面柔性机械臂动力学建模时,只需对刚柔耦合相关项进行修改,便可得到其动力学模型。本发明求解计算量小,推导思路清晰,有很好的可移植性。
- 还没有人留言评论。精彩留言会获得点赞!