一种间隙调节电缆机器臂的制作方法
本发明涉及机器臂,具体为一种间隙调节电缆机器臂。
背景技术:
1、机器臂具有独特的操作灵活性,是高精度,多输入多输出、高度非线性、强耦合的复杂系统,已在工业装配,安全防爆等领域得到广泛应用,机械臂是一个复杂系统,存在着参数摄动、外界干扰及未建模动态等不确定性,因而机器臂的建模模型也存在着不确定性,对于不同的任务,需要规划机器臂关节空间的运动轨迹,从而级联构成末端位姿。
2、现有的机器臂通过多个关节的运动从而完成对不同区域的工作,但是机器臂的臂杆间隙无法调节,使得机器臂只能在一定范围区域内进行工作,当工作区域远离机器臂各个关节所转动的最大限制距离后,需要对工作区域或者机器臂进行位置调节,来回的调节区域位置或者机器臂位置比较费事费力,影响整体流水线的工作效率,同时在部分安装环境的限制中也会难以实施,各个关节上连接的电缆线对臂杆的间隙调节也具有一定的限制,长度调节的臂杆无法对该关节处电元件连接的电缆线也进行长度调节,而过长的电缆线裸露在外面容易产生缠绕、磨损等问题,鉴于此,我们提出一种间隙调节电缆机器臂。
技术实现思路
1、针对现有技术的不足,本发明提供了一种间隙调节电缆机器臂,解决了上述背景技术中提出的问题。为实现以上目的,本发明通过以下技术方案予以实现:一种间隙调节电缆机器臂,包括一种间隙调节电缆机器臂,包括水平转动驱座,所述水平转动驱座的顶部转动连接有臂座,所述臂座的内部固定连接有肩关节驱动电机,所述肩关节驱动电机的输出轴卡接有大臂杆,所述大臂杆的内部设置有臂杆间隙调节装置,所述臂杆间隙调节装置上连接有小臂杆;
2、所述臂杆间隙调节装置包括有肘关节驱动电机和调节电缆装置,所述肘关节驱动电机的端部固定连接大臂杆的内部,所述肘关节驱动电机的输出轴卡接有套杆,所述套杆的内部滑动连接有卡杆,所述卡杆的表面转动连接有调节杆,所述卡杆的顶端固定连接有蜗杆,所述蜗杆的表面啮合有蜗轮。
3、优选的,所述大臂杆的表面转动连接臂座的表面,所述小臂杆的内部固定连接有腕关节驱动电机,所述腕关节驱动电机的输出轴卡接有连杆,所述连杆的端部固定连接有工作探头。
4、优选的,所述臂杆间隙调节装置还包括有调节电机,所述调节电机的表面固定连接大臂杆的表面,所述调节电机的输出轴卡接有螺纹转杆,所述螺纹转杆的表面螺纹连接有限位滑座,所述螺纹转杆的底端转动连接大臂杆的内部,所述限位滑座的表面固定连接调节杆的表面。
5、优选的,所述套杆的表面活动连接调节杆的内部,所述调节杆的表面滑动连接大臂杆的内壁,所述蜗杆的顶端转动连接调节杆的内部,所述蜗轮的两端均通过轴固定连接小臂杆的表面。
6、优选的,所述调节电缆装置包括有电缆线控制盒和缆线收放装置,所述电缆线控制盒的表面固定连接大臂杆的表面,所述电缆线控制盒的内壁分别滑动连接有顶部齿座和底部齿座,所述顶部齿座和底部齿座的表面均通过弹簧弹性连接有定位座,所述定位座的内部转动连接有缆线定位辊。
7、优选的,所述电缆线控制盒的内部固定连接有伸缩套,所述伸缩套的内部滑动连接有伸缩杆,所述伸缩杆的顶端固定连接有接线底座,所述接线底座的表面转动连接小臂杆的表面。
8、优选的,所述定位座的表面固定连接有导向杆,所述导向杆的表面滑动连接顶部齿座的内部,所述定位座的表面滑动连接电缆线控制盒的内壁。
9、优选的,所述缆线收放装置包括有啮合齿轮,所述啮合齿轮的表面分别啮合顶部齿座和底部齿座的表面,所述啮合齿轮的内部固定连接有连轴,所述连轴的表面固定连接有卡线盘,所述卡线盘的表面连接有调节绳索。
10、优选的,所述连轴的端部转动连接电缆线控制盒的内部,所述连轴的表面套接有涡卷弹簧,所述涡卷弹簧的两端分别固定连接连轴的表面和电缆线控制盒的内壁。
11、优选的,所述调节绳索的表面滑动连接电缆线控制盒的内壁,所述调节绳索的两端分别固定连接卡线盘的表面和接线底座的底部。
12、有以上技术方案可见,本说明书实施例提供的一种间隙调节电缆机器臂,至少具备以下有益效果:
13、(1)、本发明通过将控制小臂杆转动的电气元件肘关节驱动电机安装在大臂杆底部区域,使其不受大臂杆间隙调节的影响进行电缆长度预留,避免因过长的电缆裸露在外造成缠绕、磨损等问题,通过控制调节电机带动螺纹转杆上限位滑座移动,限位滑座通过调节杆带动小臂杆整体进行高度调节,通过调节调节杆与大臂杆内之间的间隙,达到调节肩关节处臂杆长度的效果,从而扩大小臂杆上工作探头整体的工作区域。
14、(2)、本发明通过小臂杆位置调节时带动接线底座移动,对应收卷、放卷的电缆在伸缩套和伸缩杆内进行运动,伸缩套和伸缩杆在电缆线控制盒的内部进行相应的滑动,用于保证套、杆对电缆的防护限位,避免裸露的问题,弹性固定的定位座达到对其上缆线定位辊进行弹性定位的效果,从而弹性限制其上电缆线的环绕张力,使得线体能够在受力后进行张力自调节的目的,从而便于在小臂杆固定中以蜗轮轴点转动工作时,内部连线电机进行线长自调的目的。
15、(3)、本发明通过接线底座的位置改变带动调节绳索拉动连轴上啮合齿轮转动,齿轮同时带动顶部齿座和底部齿座进行相对运动,对两个定位辊的间隙变化控制其上限制的电缆张紧度进行改变,变化后的电缆线能够根据接线底座的移动进行长度自调,从而避免电缆线在进行长度变化时硬性拉扯的问题,减少缆线磨损问题。
技术特征:
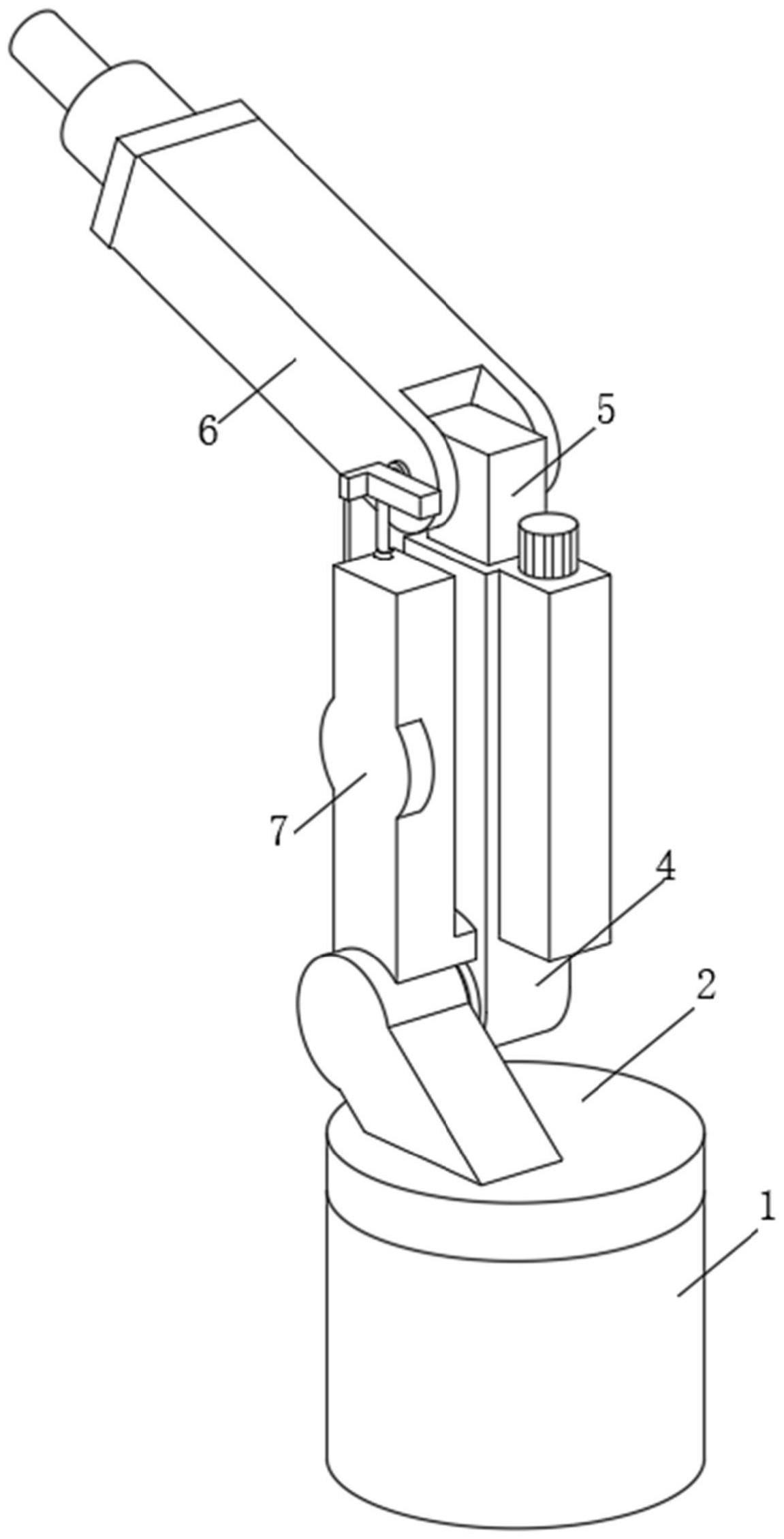
1.一种间隙调节电缆机器臂,包括水平转动驱座(1),其特征在于:所述水平转动驱座(1)的顶部转动连接有臂座(2),所述臂座(2)的内部固定连接有肩关节驱动电机(3),所述肩关节驱动电机(3)的输出轴卡接有大臂杆(4),所述大臂杆(4)的内部设置有臂杆间隙调节装置(5),所述臂杆间隙调节装置(5)上连接有小臂杆(6);
2.根据权利要求1所述的一种间隙调节电缆机器臂,其特征在于:所述大臂杆(4)的表面转动连接臂座(2)的表面,所述小臂杆(6)的内部固定连接有腕关节驱动电机(8),所述腕关节驱动电机(8)的输出轴卡接有连杆(9),所述连杆(9)的端部固定连接有工作探头(10)。
3.根据权利要求1所述的一种间隙调节电缆机器臂,其特征在于:所述臂杆间隙调节装置(5)还包括有调节电机(57),所述调节电机(57)的表面固定连接大臂杆(4)的表面,所述调节电机(57)的输出轴卡接有螺纹转杆(58),所述螺纹转杆(58)的表面螺纹连接有限位滑座(59),所述螺纹转杆(58)的底端转动连接大臂杆(4)的内部,所述限位滑座(59)的表面固定连接调节杆(54)的表面。
4.根据权利要求3所述的一种间隙调节电缆机器臂,其特征在于:所述套杆(52)的表面活动连接调节杆(54)的内部,所述调节杆(54)的表面滑动连接大臂杆(4)的内壁,所述蜗杆(55)的顶端转动连接调节杆(54)的内部,所述蜗轮(56)的两端均通过轴固定连接小臂杆(6)的表面。
5.根据权利要求1所述的一种间隙调节电缆机器臂,其特征在于:所述调节电缆装置(7)包括有电缆线控制盒(71)和缆线收放装置(79),所述电缆线控制盒(71)的表面固定连接大臂杆(4)的表面,所述电缆线控制盒(71)的内壁分别滑动连接有顶部齿座(72)和底部齿座(73),所述顶部齿座(72)和底部齿座(73)的表面均通过弹簧弹性连接有定位座(74),所述定位座(74)的内部转动连接有缆线定位辊(75)。
6.根据权利要求5所述的一种间隙调节电缆机器臂,其特征在于:所述电缆线控制盒(71)的内部固定连接有伸缩套(76),所述伸缩套(76)的内部滑动连接有伸缩杆(77),所述伸缩杆(77)的顶端固定连接有接线底座(78),所述接线底座(78)的表面转动连接小臂杆(6)的表面。
7.根据权利要求5所述的一种间隙调节电缆机器臂,其特征在于:所述定位座(74)的表面固定连接有导向杆(741),所述导向杆(741)的表面滑动连接顶部齿座(72)的内部,所述定位座(74)的表面滑动连接电缆线控制盒(71)的内壁。
8.根据权利要求5所述的一种间隙调节电缆机器臂,其特征在于:所述缆线收放装置(79)包括有啮合齿轮(791),所述啮合齿轮(791)的表面分别啮合顶部齿座(72)和底部齿座(73)的表面,所述啮合齿轮(791)的内部固定连接有连轴(792),所述连轴(792)的表面固定连接有卡线盘(793),所述卡线盘(793)的表面连接有调节绳索(794)。
9.根据权利要求8所述的一种间隙调节电缆机器臂,其特征在于:所述连轴(792)的端部转动连接电缆线控制盒(71)的内部,所述连轴(792)的表面套接有涡卷弹簧(795),所述涡卷弹簧(795)的两端分别固定连接连轴(792)的表面和电缆线控制盒(71)的内壁。
10.根据权利要求8所述的一种间隙调节电缆机器臂,其特征在于:所述调节绳索(794)的表面滑动连接电缆线控制盒(71)的内壁,所述调节绳索(794)的两端分别固定连接卡线盘(793)的表面和接线底座(78)的底部。
技术总结
本发明涉及机器臂技术领域,具体为一种间隙调节电缆机器臂,包括水平转动驱座,所述水平转动驱座的顶部连接有臂座,所述臂座的内部连接有肩关节驱动电机,所述肩关节驱动电机的输出轴卡接有大臂杆,所述大臂杆的内部设置有臂杆间隙调节装置,所述臂杆间隙调节装置上连接有小臂杆。本发明通过将肘关节驱动电机安装在大臂杆上,使其不受大臂杆间隙调节的影响进行电缆长度预留,避免因过长的电缆裸露在外造成缠绕、磨损等问题,通过调节电机带动螺纹转杆上限位滑座移动,限位滑座通过调节杆带动小臂杆高度调节,调节调节杆与大臂杆内之间的间隙,达到调节肩关节处臂杆长度的效果,从而扩大小臂杆上工作探头整体的工作区域。
技术研发人员:由嘉,周宇,韦永宏
受保护的技术使用者:安捷电维智能科技研究院(广州)有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!