一种倾斜墙面暗门开闭装置的制作方法
本发明属于建筑施工,具体而言,涉及一种倾斜墙面暗门开闭装置。
背景技术:
1、暗门是指在装饰装修墙面可开启的门体,暗门在关闭状态下可完全融合于墙面,即暗门材质、门缝与整体墙面完全一致在关闭状态下可以保证墙体外观整体性。
2、公开号为cn218438958u(申请号为cn202221446294.7)的中国专利公开了一种平开暗门机构,包括装饰墙面、开门门体、门体固定件以及连杆,装饰墙面上固定设置开门门体,开门门体上固定设置门体固定件,门体固定件上固定设置连杆,连杆上套接设置有固定支座。本实用新型通过设置双连杆结构,提出了一种可以应用于超厚度暗门及小开门空间的暗门开门结构,此结构可在门体厚度200mm以内或者造型墙面、开门空间略大于门体厚度情况下适用,开合结构紧凑,应用广泛,同时生产成本低,安装方便。
3、上述暗门开闭机构难以流畅开关,无法实现暗门完全隐藏。
技术实现思路
1、有鉴于此,本发明提供一种倾斜墙面暗门开闭装置,能够解决暗门开闭机构难以流畅开关,无法实现暗门完全隐藏的问题。
2、本发明是这样实现的:
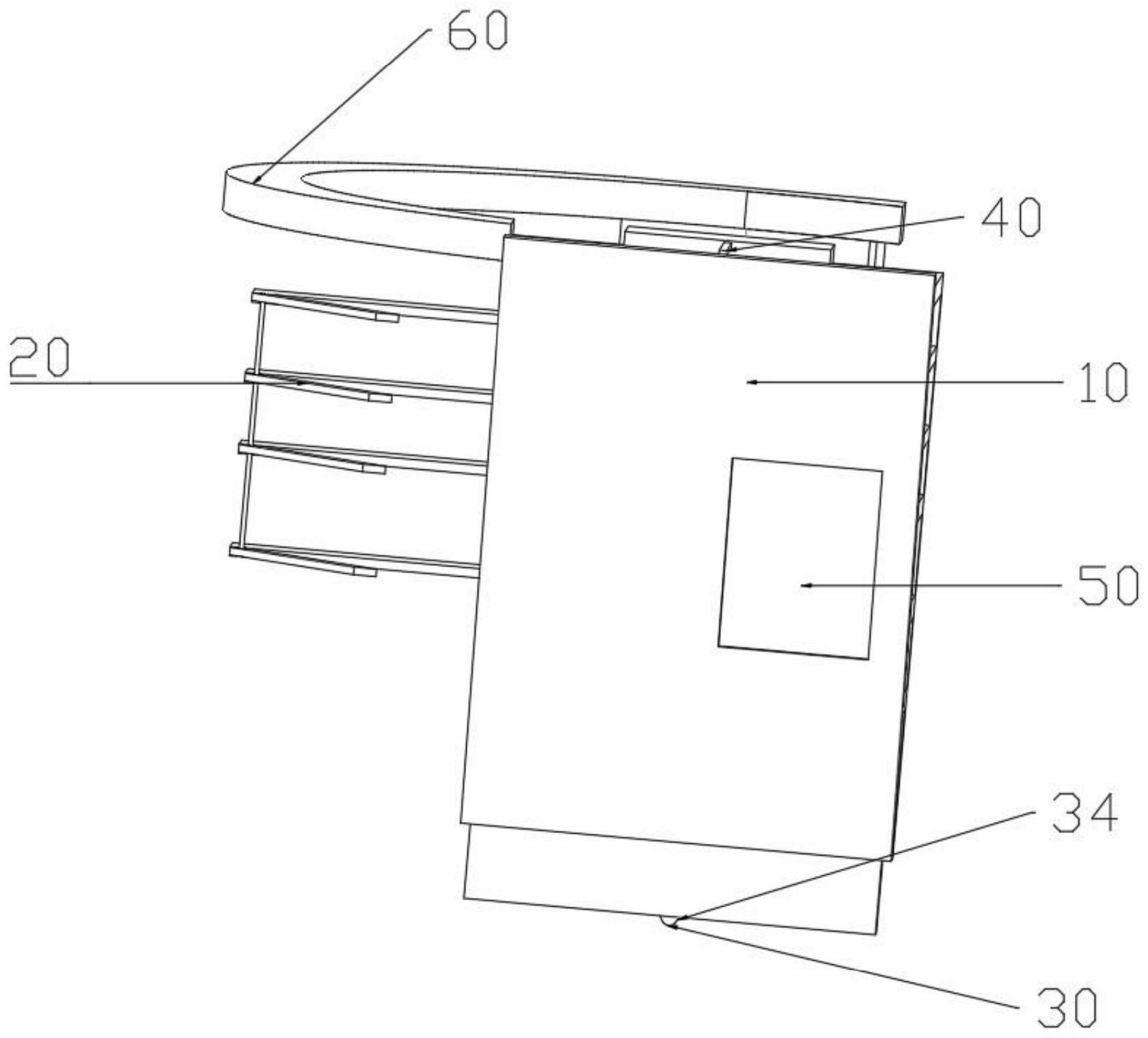
3、本发明提供一种倾斜墙面暗门开闭装置,其中,具有暗门,所述暗门为方形结构,设置在倾斜墙面上通过骨架与所述倾斜墙面固定连接;所述骨架的一端与暗门的侧壁固定连接,另一端与所述倾斜墙面的侧边固定连接,所述骨架用于带动所述暗门移动;所述暗门的外侧表面中心位置设置有感应机构,所述感应机构用于识别人体正确手势密码;所述暗门的顶部还设置有电动开门器,所述电动开门器固定在所述倾斜墙面上,另一端与所述暗门的顶部固定连接,用于电动控制所述暗门在所述骨架的支撑下进入所述倾斜墙体的内部;所述暗门的底部设置有滚轮机构,所述滚轮机构用于方便所述暗门的开合;所述暗门的两侧还设置有半环形开门机构,所述半环形开门机构用于带动所述暗门向外移动,控制所述暗门的开合。
4、本发明提供的一种倾斜墙面暗门开闭装置的技术效果如下:通过设置骨架,实现暗门与倾斜墙体的活动连接,方便暗门开合;通过设置滚轮机构,用于调整距离,避免所述暗门在开合过程中与地面距离逐渐减小的情况,实现暗门的正常开合;通过设置电动开门器,驱动暗门在骨架的支撑下进入倾斜墙体的内部,方便暗门的开合;通过设置感应机构,通过手势对暗门的开合进行控制,方便暗门在无接触形式下运行;通过设置半环形开门机构,用于带动暗门向外移动,控制暗门的开合。
5、在上述技术方案的基础上,本发明的一种倾斜墙面暗门开闭装置还可以做如下改进:
6、其中,所述感应机构包括红外感应器、手势感应芯片、信号传输芯片以及摄像头,所述红外感应器设置在所述暗门的表面,用于监测所述暗门附近人体的移动;所述手势感应芯片设置在所述红外感应器的下端,用于对所述暗门前侧人体的手势进行识别;所述信号传输芯片设置在所述手势感应芯片的后盾,用于将所述红外感应器以及所述手势感应芯片的信号传输到连接的终端,所述摄像头设置在所述红外感应器的顶部,对所述暗门附近进行实时监控;所述红外感应器、所述手势感应芯片、所述信号传输芯片以及所述摄像头电连接,用于实现通过手势开合所述暗门;
7、所述手势感应芯片包括红外发射模块、第一红外接收模块、第二红外接收模块以及手势感应模块,所述红外发射模块、所述第一红外接收模块以及所述第二红外接收模块均与所述手势感应模块电连接,所述红外发射模块位于所述第一红外接收模块以及所述第二红外接收模块之间,所述手势感应模块用于根据所述第一红外接收模块以及所述第二红外接收模块接收所述红外发射模块的顺序识别人体手势;
8、所述手势感应芯片上设置有存储器和处理器,其中所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时能够实现以下步骤:
9、数据采集步骤:用于采集所述第一红外接收模块以及所述第二红外接收模块接收到的手势数据信号;
10、数据处理步骤:用于对接收到的手势数据信号进行识别处理,并将处理后的信号传输到所述电动开门器以及所述半环形开门机构,控制所述暗门的开合。
11、所述红外发射模块、所述第一红外接收模块以及所述第二红外接收模块纵向排列或者横向排列,所述红外发射模块发射红外信号,并由所述第一红外接收模块以及所述第二红外接收模块接收人体手部遮挡反射的红外信号,通过所述手势感应模块根据所述第一红外接收模块以及所述第二红外接收模块接收红外信号的顺序,识别人体手势;
12、所述手势包括从左至右移动的手势、从右至左移动的手势、从上至下移动的手势和/或从下至上移动的手势;
13、所述第一红外接收模块为第一红外接收二极管,所述第二红外接收模块为第二红外接收二极管,所述红外发射模块为红外发射二极管,所述红外发射二极管的正极连接sys_5v供电端,红外发射二极管的负极连接手势感应芯片的irled端,所述第一红外接收二极管的正极和第二红外接收二极管的正极均接地,所述第一红外接收二极管的负极连接手势感应芯片的rx1端,第二红外接收二极管的负极连接手势感应芯片的rx2端;
14、所述手势感应模块包括滤波单元、限流保护单元和偏置提供单元,所述滤波单元的一端连接sys_5v供电端和所述手势感应芯片的vcc端,所述限流保护单元的一端连接所述手势感应芯片的scl端和sda端,限流保护单元的另一端连接导航系统的微处理器,保护处理器的gpio口,所述偏置提供单元的一端连接所述手势感应芯片的intb端和sdb端和处理器,偏置提供单元的另一端连接sys_3v3供电端,给所述手势感应芯片提供偏置电压;
15、所述滤波单元包括第一电容和第二电容,所述第一电容的一端和第二电容的一端连接sys_5v供电端和所述手势感应芯片的vcc端,第一电容的另一端和第二电容的另一端接地;
16、所述限流保护单元包括第一电阻和第二电阻,所述第一电阻的一端连接所述手势感应芯片的scl端,第一电阻的另一端连接微处理器,第二电阻的一端连接所述手势感应芯片的sda端,第二电阻的另一端连接处理器;
17、所述偏置提供单元包括第三电阻和第四电阻,所述第三电阻的一端连接所述手势感应芯片的sdb端,第三电阻的另一端连接处理器,第四电阻的一端连接所述手势感应芯片的intb端,第四电阻的另一端连接处理器。
18、进一步的,所述数据处理的具体步骤包括:
19、第一步,采集多种手势数据,并输入相应的数据输出设定;
20、第二步,建立手势控制神经网络模型,将多种手势数据作为训练输入,并将其对应的数据输出设定作为输出进行训练;
21、第三步,将采集的所述第一红外接收模块以及所述第二红外接收模块接收的手势数据信号输入到所述手势控制神经网络模型中,得到对应的输出设定;
22、第四步,将输出设定传输到所述电动开门器以及所述半环形开门机构,控制所述暗门的开合。
23、其中,所述半环形开门机构包括收缩机构、半圆弧桁架以及链条,所述收缩机构设置在所述暗门的后方,所述半圆弧桁架的一端所述倾斜墙面上,所述半圆弧桁架的另一端与所述收缩机构固定连接,所述半圆弧桁架上设置有所述链条,所述链条与所述暗门固定连接,所述收缩机构为所述链条提供动力,带动所述链条拉动所述暗门开合;
24、所述收缩机构具有桁架,所述桁架上设置有电机、链条张紧消音机构以及导向链轮,所述链条张紧消音机构用于对所述链条进行张紧,所述导向链轮用于对所述链条进行导向,所述电机用于对所述链条的运动进行减速;所述导向链轮为多个,分别设置在所述桁架的两端;
25、所述链条通过多个链条悬挂导向机构悬挂在所述半圆弧桁架的半圆周上,所述链条悬挂导向机构固定在所述半圆弧桁架的底部,所述链条悬挂导向机构上还设置有固定板,所述固定板焊接在所述半圆弧桁架的底部,所述链条悬挂导向机构的底部设置有导向轮以及防脱板,所述导向轮与所述链条啮合连接;所述防脱板为“凵”形,用于托住所述链条避免其掉落。
26、所述电机为变频调速减速机,所述电机上设置有驱动轴、减速机固定板以及驱动链齿轮,所述减速机固定板内设置有安装孔,所述驱动轴的截面为六边形,所述安装孔的内径大于所述驱动轴的外径,所述减速机固定板通过所述安装孔套设在所述驱动轴的外侧,与所述电机的外壁固定连接;所述驱动链齿轮内设置有与所述驱动轴相匹配的六角通孔,所述驱动链齿轮套设在所述驱动轴上,与所述链条啮合连接。
27、进一步的,所述链条张紧消音机构数量为多个,所述链条张紧消音机构具有直线导轨、张紧链轮座以及张紧弹簧,所述直线导轨通过直线导轨固定板固定在所述桁架上,并在所述直线导轨内滑动,所述张紧弹簧的一端通过铰链轴机构连接在所述张紧链轮座,所述张紧弹簧的另一端通过可伸缩机构连接在所述桁架的侧壁上;所述张紧链轮座设置有张紧链轮。
28、进一步的,所述铰链轴机构包括芯轴和底座,所述芯轴的两端分别插入所述底座两侧壁上设置的连接孔内,所述芯轴上设置有与所述张紧弹簧相适配的凹槽,所述张紧弹簧的端部连接于所述芯轴上的凹槽内;所述底座与所述张紧链轮座固定连接;
29、所述可伸缩机构包括铰链轴机构,所述铰链轴机构的底座一端固定连接有芯轴,所述芯轴与所述张紧弹簧的端部相连;所述底座的另一端固定连接有张紧拉杆,所述张紧拉杆穿过所述张紧拉杆固定板的侧壁并与所述张紧拉杆固定板滑动连接,所述张紧拉杆穿出所述张紧拉杆固定板的一端套设有限位螺母。
30、其中,所述滚轮机构包括套筒、滑动杆、转动轮以及弹簧,所述套筒设置在所述暗门的底部,所述滑动杆滑动安装在所述套筒的内部,所述转动轮与所述滑动杆转动连接;所述弹簧设置在所述滑动杆的顶部以及所述套筒的顶壁之间,所述滑动杆的底部穿出所述套筒与所述转动轮连接。
31、所述转动轮为万向轮,所述转动轮与所述滑动杆的底部通过转动轴承连接,用于保证所述转动轮的正常咋混动,所述弹簧用于调整所述转动轮与所述暗门底部的距离,避免所述暗门在开合过程中与地面距离逐渐减小的情况。
32、其中,所述骨架包括三角骨架、连接架、支撑架以及旋转轴,所述三角骨架的一端与所述暗门连接,所述三角骨架的另一端与所述连接架的一侧固定连接,所述三角骨架用于调整所述暗门的倾斜角度,所述连接架用于固定连接所述三角骨架;所述支撑架与所述连接架固定连接,所述旋转轴与所述支撑架旋转连接,用于实现所述暗门的开合。
33、进一步的,还设置有控制器,所述控制器与所述电动开门器、所述感应机构以及所述电机电连接。
34、其中,所述暗门的侧边设置有橡胶层,所述橡胶层用于减轻所述暗门开合时产生的震动。
35、与现有技术相比较,本发明提供的一种倾斜墙面暗门开闭装置的有益效果是:通过设置骨架,实现暗门与倾斜墙体的活动连接,方便暗门开合;通过设置滚轮机构,用于调整距离,避免所述暗门在开合过程中与地面距离逐渐减小的情况,实现暗门的正常开合;通过设置电动开门器,驱动暗门在骨架的支撑下进入倾斜墙体的内部,方便暗门的开合;通过设置感应机构,通过手势对暗门的开合进行控制,方便暗门在无接触形式下运行;通过设置半环形开门机构,用于带动暗门向外移动,控制暗门的开合,能够解决暗门开闭机构难以流畅开关,无法实现暗门完全隐藏的问题。
- 还没有人留言评论。精彩留言会获得点赞!