一种机器人末端工具自动更换装置
本发明涉及重载工业机器人或者协作机械臂,尤其涉及一种机器人末端工具自动更换装置。
背景技术:
1、随着现代工业自动化技术的发展,机器人末端工具更换装置需求增多,促使机器人末端更换装置蓬勃发展。更换装置一般包括机器人部分和工具部分,其中,机器人部分安装在机器人上,工具部分安装在机器人末端工具上。对于重载工业机器人来说,现有机器人末工具更换装置主要存在以下三方面的问题:
2、第一,现有的工具更换装置一般多采用气缸结构实现工具的切换和锁紧,但气缸结构结构复杂,阻挡了中间的驱动工具;此外,带气缸的工具更换装置运行的过程中存在意外断气的可能,需采用更可靠和简单的防脱落结构,方能保证工具更换装置自动运行的安全性。
3、第二,由于工业机器人通常执行的是精密工作,允许的公差极为有限,现有技术存在已知的工具更换装置没有正确连接,甚至工作过程开始时才对齐的风险,进而无法确保机器人工作的精度。
4、第三,现有的工具更换装置一般需连接一个外部元件,该外部元件通常以电动或气动方式快速连接或释放,依次提供或断开工具更换装置的额外动力源,这使得工具更换装置昂贵且难以安装。
技术实现思路
1、本发明的目的在于解决现有的工具更换装置结构复杂、安全性低及安装不便等技术问题,而提供一种机器人末端工具自动更换装置,该装置依靠弹簧力及机械结构自锁实现工具部件的锁紧,并且可以选择手动或自动实现对工具部件的更换;同时不需要给工具的动作传输动力,仅仅利用机械结构即可实现驱动力的传输。
2、本发明解决上述技术问题所采用的技术方案如下:
3、本发明提供了一种机器人末端工具自动更换装置,其特殊之处在于:
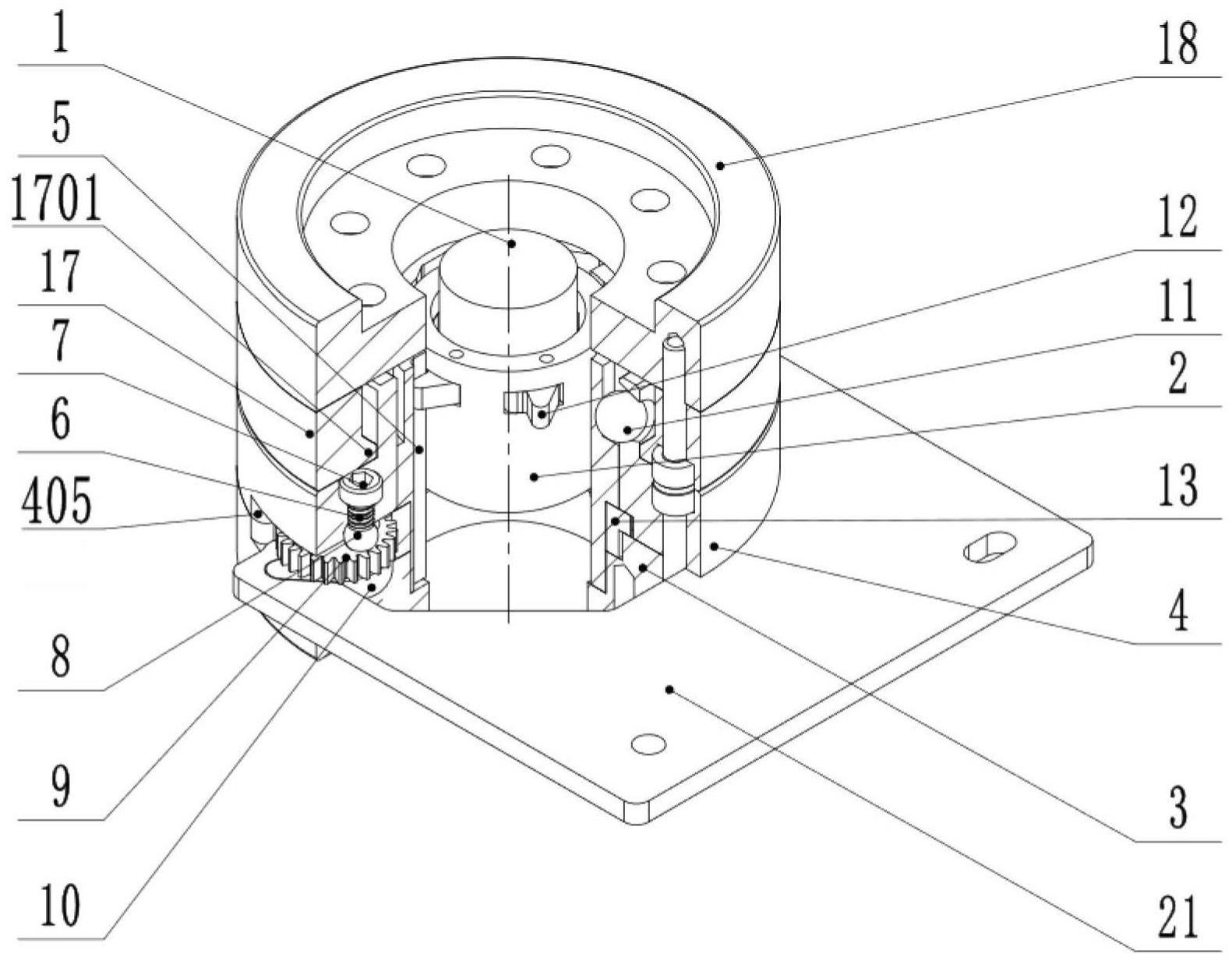
4、包括驱动杆、机器人部件、工具部件、从动杆以及托架;
5、所述驱动杆上端与机器人末端驱动机构连接,下端伸入所述机器人部件;
6、所述工具部件设置于机器人部件下方,且与机器人部件可拆卸连接;
7、所述从动杆上端穿过工具部件,与所述工具部件转动连接,且与驱动杆可拆卸连接;所述从动杆下端用于连接机器人末端工具;
8、所述托架用于实现所述工具部件和所述机器人部件之间的连接与拆卸;
9、所述驱动杆、机器人部件、工具部件以及从动杆的中轴线均位于同一条直线上。
10、进一步地,所述工具部件包括筒状的工具环、筒状的端板、环状锁紧凸轮、第一钢球、小齿轮、凸轮杆、多个第二钢球;
11、所述锁紧凸轮同轴套装在从动杆外,且与从动杆设置有间隙;所述锁紧凸轮的外壁上部设有凸轮轮廓,中部设有第一限位凸环,下部设置有大齿轮;所述锁紧凸轮的内壁上设置有曲线轮廓;
12、所述端板同轴且可滑动地套装在锁紧凸轮外;所述端板下端外壁上设置有第一安装凸环;所述第一安装凸环侧壁设有第一凹槽;小齿轮和凸轮杆自上而下同轴设置在第一凹槽内;所述凸轮杆可与托架啮合传动;所述小齿轮与大齿轮啮合传动;所述第一钢球设置在端板内且可沿轴向伸缩,所述小齿轮上端面设有两个球面卡槽;所述第一钢球的下端与其中一个球面卡槽卡接,用于限定小齿轮的转动角度;所述端板上端侧壁圆周均匀设置有多个小口向外的锥形孔;第二钢球设置在锥形孔内;
13、所述工具环同轴套装于锁紧凸轮外,且与第一安装凸环下端固定连接;所述工具环内壁上设有第二限位凸环;第二限位凸环的上端面与锁紧凸轮下端面接触;所述工具环外侧壁设置有可与托架配合的支撑平面;所述支撑平面与第一凹槽相对设置。
14、进一步地,所述从动杆设置有中心孔,所述从动杆侧壁上沿周向均匀设有多个楔杆安装孔;所述楔杆安装孔内设有楔杆;楔杆可在楔杆安装孔内旋转;
15、所述从动杆的上端伸入锁紧凸轮内,所述楔杆的外伸端与曲线轮廓对应。
16、进一步地,所述机器人部件包括锁紧环和机器人环;
17、所述锁紧环同轴套装于端板外且位于第一安装凸环上端,所述锁紧环下端面设有固定销和定位销;第一安装凸环上端面设置有相应的销孔;
18、所述锁紧环内壁下端设有第三限位凸环;所述第三限位凸环的上端面为小端向下的圆锥面,该圆锥面与所述第二钢球对应;
19、所述机器人环与所述锁紧环固定连接,且位于锁紧环上端;
20、所述驱动杆下端伸入从动杆上端的中心孔内,驱动杆的外壁圆周设置有环形凹槽;所述环形凹槽与所述楔杆的内伸端对应。
21、进一步地,所述凸轮轮廓包括多个沿周向均布且与相应第二钢球接触的第一外伸曲面,用于驱动第二钢球沿锥形孔轴线运动并实现锁紧环与端板的自锁;
22、所述曲线轮廓包括多个沿周向均布且与相应楔杆接触的第二外伸曲面,用于驱动楔杆实现正向旋转和反向旋转。
23、进一步地,所述托架呈匚字形,其中一个外伸端端部设有第一啮合齿,第一啮合齿与该外伸端之间构成第一弧形凹槽;
24、所述凸轮杆设有外凸的第二啮合齿及与第二啮合齿相邻且内凹的第二弧形凹槽;第一啮合齿可与第二弧形凹槽啮合;第二啮合齿可与第一弧形凹槽啮合;所述托架的另一个外伸端端部可与支撑平面贴合。
25、进一步地,所述固定销和定位销沿锁紧环的直径方向对称设置;所述固定销和定位销分别设有同轴连接的两个圆柱段;所述固定销上端的圆柱段伸入所述锁紧环内,且与锁紧环固定连接;下端伸入第一安装凸环上端面相应的销孔内与第一安装凸环连接;
26、所述定位销上端的圆柱段伸入所述锁紧环内,且与锁紧环固定连接;下端的圆柱段侧壁上设有至少一个切削面,用于定位销的导向定位。
27、进一步地,所述机器人环内侧设有第二安装凸环,所述第二安装凸环上端设有法兰,所述机器人环通过法兰与机器人连接;
28、所述第二限位凸环上绕其周向均匀设置有多个第一螺纹孔,用于与机器人末端工具连接。
29、进一步地,当大齿轮驱动锁紧凸轮顺时针转动时,第二外伸曲面向内压迫楔杆的外伸端,使得楔杆顺时针旋转,直至楔杆的内伸端向内伸出楔杆安装孔,外伸端向内部分缩回楔杆安装孔,同时第一外伸曲面向外压迫第二钢球向锥形孔的小口端运动;
30、当大齿轮驱动锁紧凸轮逆时针转动时,第二外伸曲面与未缩回的楔杆的外伸端接触并驱动楔杆逆时针旋转,直至楔杆的内伸端收缩至楔杆安装孔内,外伸端向外完全伸出楔杆安装孔,同时第一外伸曲面不再压迫第二钢球,使得第二钢球远离锥形孔的小口端。
31、进一步地,所述锁紧凸轮的外壁下部设有一个横向平面;所述大齿轮外壁下部设有第二螺纹孔,所述大齿轮采用紧定螺钉与锁紧凸轮连接;
32、所述机器人环与所述锁紧环之间通过法兰连接。
33、本发明的有益效果如下:
34、1、本发明设置了可与机器人连接的机器人部件,以及可与机器人末端工具连接的工具部件;机器人部件与工具部件之间可拆卸连接,装置整体结构简单,且容易安装与拆卸;同时,本发明的装置全部属于机械连接,安全性高,可适用于重载等复杂环境工况。
35、2、本发明提供的机器人末端自动更换装置不需要其他能量供应方式,依靠机械结构自锁实现机器人部件与工具部件的自锁连接。
36、3、本发明可依靠机器人末端的运动进行工具的自动更换,从而提高了更换的便利性。
37、4、本发明也同样支持在停机维护中手动更换工具,且在人工操作的情况下也可以保证更换的准确性和安全性。
- 还没有人留言评论。精彩留言会获得点赞!