一种基于位置和绳索双空间同步的绳驱并联系统控制方法
本发明属于多绳索并联驱动系统控制领域,具体涉及一种基于位置和绳索双空间同步的绳驱并联系统控制方法。
背景技术:
1、绳驱并联系统在许多工业场景中都具有良好的应用前景,但是精确地控制其末端执行器的位置和姿态是复杂且困难的,这极大地限制了绳驱并联机器人的实际应用。绳驱并联系统采用并联分布式构型,其工作原理是:绳驱并联系统通过控制n个互相独立的电机驱动n根独立的绳索,间接地控制末端执行器的位置与姿态。绳驱并联系统的驱动单元采用多根独立的柔性绳索,多根绳索长度调节的是否同步,在调节过程中绳索是否会产生振荡都会影响对末端执行器位置和姿态的控制精度。因此,绳索空间中的绳索长度的同步性是一个直接影响末端执行器控制精度和稳定性的因素。同时考虑到末端执行器的每一个位置点都由6个分量所组成,由x、y、z三轴坐标和绕x、y、z三轴旋转角度组成。末端执行器位置空间下的每个分量的控制同步性同样会影响末端执行器的控制精度和稳定性。但是现有控制方法并未同时考虑绳索空间下绳索长度的同步性和位置空间下位置分量的同步性,导致现有控制方法的控制精度仍然较低,控制稳定性仍然较差。因此,在控制器设计中需要将两者充分结合考虑,通过提高绳索空间和位置空间的同步性,进而改善对末端执行器的控制效果。
技术实现思路
1、本发明的目的是为解决现有多绳索并联控制方法的控制精度低、控制稳定性差的问题,而提出的一种基于位置和绳索双空间同步的绳驱并联系统控制方法。
2、本发明为解决上述技术问题所采取的技术方案是:
3、一种基于位置和绳索双空间同步的绳驱并联系统控制方法,所述方法具体包括以下步骤:
4、步骤一、建立绳索空间下n根绳索长度的偏差耦合误差向量ecrc;
5、步骤二、设计位置空间下末端执行器位置分量的偏差耦合误差向量eprc;
6、步骤三、基于ecrc和eprc设计位置和绳索双空间下的偏差耦合误差向量epcrc;
7、步骤四、基于epcrc构建位置和绳索双空间同步控制器upcrcc;
8、步骤五、基于upcrcc构建最终的位置和绳索双空间同步的绳驱并联系统控制器utc-pcrcc。
9、本发明的有益效果是:
10、(1)本发明考虑了位置空间同步性对末端执行器控制过程的影响,构建了一套基于环形拓扑偏差耦合的末端执行器位置耦合误差,基于此耦合误差所设计的同步控制器可以有效地提升末端执行器的控制稳定性和控制精度。
11、(2)基于构建的绳索空间偏差耦合误差和位置空间偏差耦合误差,提出了一套位置和绳索双空间偏差耦合误差,基于此耦合误差所设计的同步控制器可以有效地提升多绳索长度调节的同步性和末端执行器位置姿态调节的同步性。
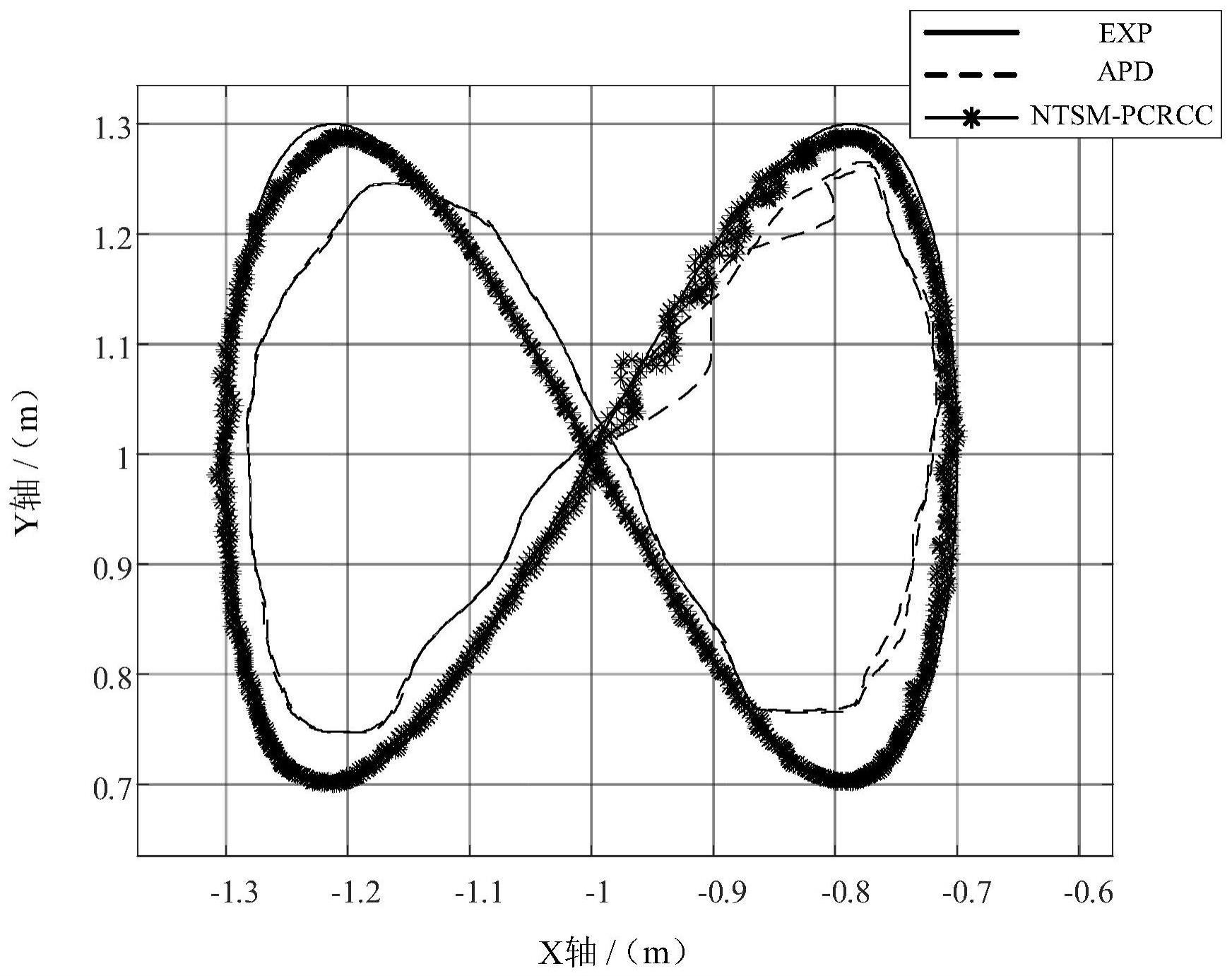
12、(3)本发明基于所构建的位置和绳索双空间偏差耦合误差,提出了一种基于位置和绳索双空间同步的绳驱并联系统控制方法框架。相比于传统的控制器,采用本发明框架所设计的控制器可以有效地改善末端执行器的控制精度并削弱其自身的振荡。实验结果表明:采用本发明方法设计的控制器可以使x轴跟踪误差降低77.8%,y轴跟踪误差降低80.5%,z轴跟踪误差降低71.6%。
技术特征:
1.一种基于位置和绳索双空间同步的绳驱并联系统控制方法,其特征在于,所述方法具体包括以下步骤:
2.根据权利要求1所述的一种基于位置和绳索双空间同步的绳驱并联系统控制方法,其特征在于,所述步骤一的具体过程为:
3.根据权利要求2所述的一种基于位置和绳索双空间同步的绳驱并联系统控制方法,其特征在于,所述第i根绳索长度的跟踪误差eci为:
4.根据权利要求3所述的一种基于位置和绳索双空间同步的绳驱并联系统控制方法,其特征在于,所述步骤二的具体过程为:
5.根据权利要求4所述的一种基于位置和绳索双空间同步的绳驱并联系统控制方法,其特征在于,所述运动向量x中第i′个分量所对应的跟踪误差epi′为:
6.根据权利要求5所述的一种基于位置和绳索双空间同步的绳驱并联系统控制方法,其特征在于,所述步骤三的具体过程为:
7.根据权利要求6所述的一种基于位置和绳索双空间同步的绳驱并联系统控制方法,其特征在于,所述步骤四的具体过程为:
8.根据权利要求7所述的一种基于位置和绳索双空间同步的绳驱并联系统控制方法,其特征在于,所述步骤五的具体过程为:
9.根据权利要求8所述的一种基于位置和绳索双空间同步的绳驱并联系统控制方法,其特征在于,所述常规控制器utc为非奇异终端滑模控制器或pid控制器。
技术总结
一种基于位置和绳索双空间同步的绳驱并联系统控制方法,它属于多绳索并联驱动系统控制领域。本发明解决了现有多绳索并联控制方法的控制精度低、控制稳定性差的问题。本发明采取的技术方案为:步骤一、建立绳索空间下n根绳索长度的偏差耦合误差向量e<subgt;crc</subgt;;步骤二、设计位置空间下末端执行器位置分量的偏差耦合误差向量e<subgt;prc</subgt;;步骤三、基于e<subgt;crc</subgt;和e<subgt;prc</subgt;设计位置和绳索双空间下的偏差耦合误差向量e<subgt;pcrc</subgt;;步骤四、基于e<subgt;pcrc</subgt;构建位置和绳索双空间同步控制器u<subgt;pcrcc</subgt;;步骤五、基于u<subgt;pcrcc</subgt;构建最终的位置和绳索双空间同步的绳驱并联系统控制器u<subgt;tc‑pcrcc</subgt;。本发明方法可以应用于绳驱并联系统控制。
技术研发人员:李晓磊,卢彦岐,孙光辉,向治桦,郇百正,唐飞龙
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!