一种机器人IMU装置自动化配置方法及装置与流程
本发明涉及imu装置领域,具体提供一种机器人imu装置自动化配置方法及装置。
背景技术:
1、imu装置是一种惯性测量模块,简称imu,是一种用于测量物体三轴姿态角(或角速率)以及加速度的装置,机器人通过获取imu装置的测量数据计算运行姿态,是机器人导航中重要的关键部件。
2、当前imu应用情况:在机器人生产环节,安装imu装置后,需要手工进行imu装置的系统端口号绑定配置,配置完成后会生成固定的imu设备节点,机器人应用程序方可使用,当前配置的方法如下:
3、1、连接鼠标、键盘、显示器等操作设备;
4、2、开机进入系统操作界面;
5、3、手动输入查询imu设备命令,并人工观察找出imu装置对应的usb设备名称;
6、4、手动输入命令查询该usb设备名称的内核硬件端口号,并人工比较设备厂商编号idvendor及设备产品编号idproduct是否一致;
7、5、手动创建设备管理规则文件,将硬件端口号手动填写到该文件中;
8、6、手动重启设备管理服务程序;
9、7、手动检查imu设备节点是否正常生成;
10、8、完成配置。
11、上述配置方法,全部采用人工手动操作,耗费时间及人力,效率较低,不易于批量生产,影响生产速度。
技术实现思路
1、本发明是针对上述现有技术的不足,提供一种实用性强的机器人imu装置自动化配置方法。
2、本发明进一步的技术任务是提供一种设计合理,安全适用的机器人imu装置自动化配置装置。
3、本发明解决其技术问题所采用的技术方案是:
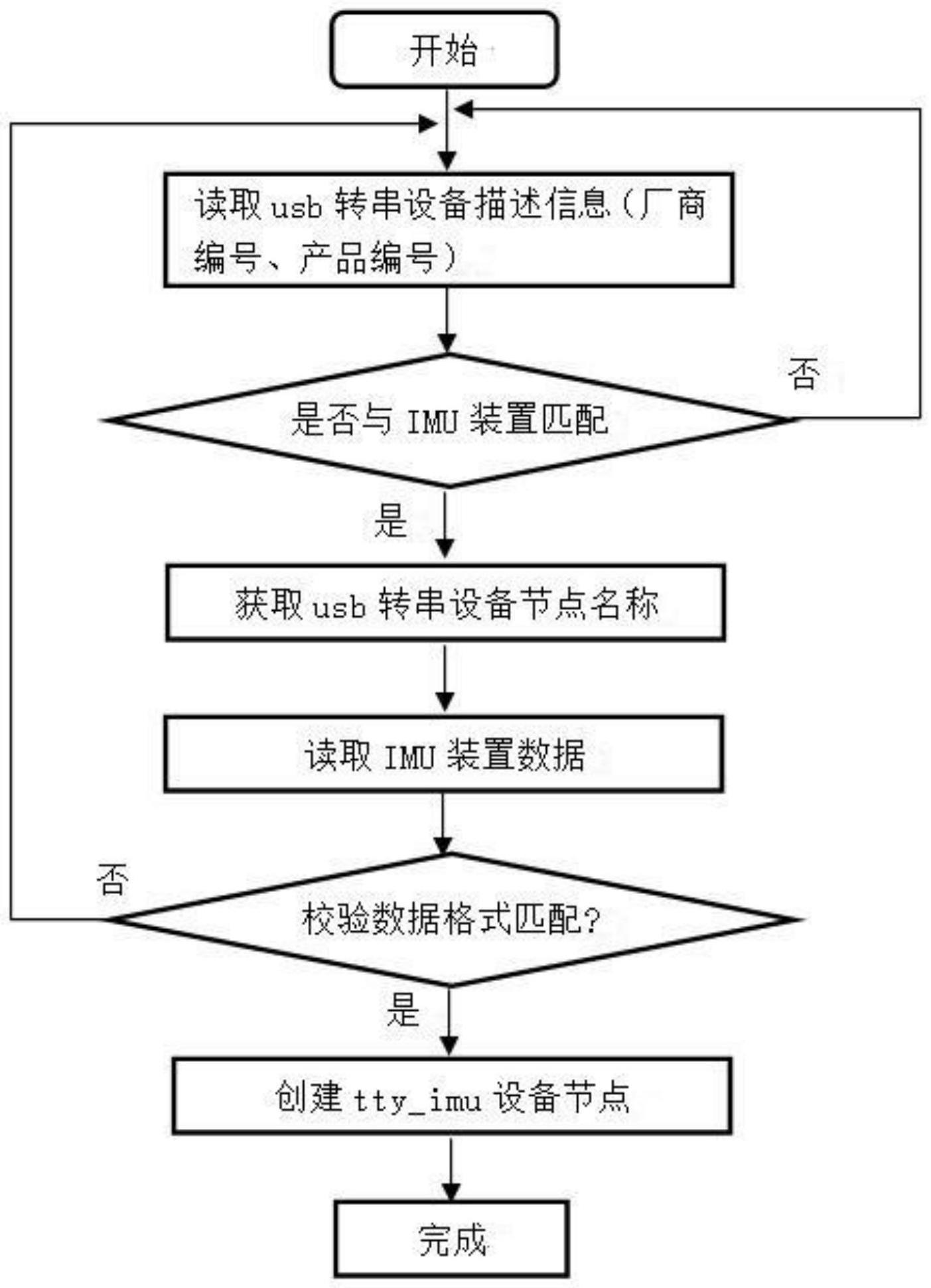
4、一种机器人imu装置自动化配置方法,在linux内核usb转串驱动中实现,在usb转串设备驱动加载时,获取当前usb转串设备的idvendor及idproduct,判断与imu装置的idvendor及idproduct是否一致,
5、通过调用用户空间程序读取imu装置实时发送出来的数据,并校验数据是否符合imu装置数据协议格式,符合则检索imu装置成功,接下来通过创建软链接生成固定的“tty_imu”设备节点,完成自动化生成配置过程。
6、进一步的,具体步骤如下:
7、s1、在linux内核usb转串驱动;
8、s2、检索出厂商编号和产品编号;
9、s3、校验厂商编号和产品编号是否匹配;
10、s4、获取usb转串设备的设备节点名称;
11、s5、获取imu装置数据;
12、s6、用户空间程序中校验数据是否符合imu装置数据协议格式;
13、s7、用户空间程序中创建tty_imu软链接;
14、s8、完成自动化配置。
15、进一步的,在步骤s1中,在linux内核usb转串驱动usb_serial_probe函数中,循环探测读取usb转串设备的描述信息。
16、进一步的,在步骤s2中,在usb转串设备描述信息中检索出厂商编号idvendor及产品编号idproduct。
17、进一步的,在步骤s3中,校验usb转串设备的厂商编号idvendor及产品编号idproduct与imu装置的信息是否匹配,如不匹配继续步骤s1进行循环探测,匹配则继续下步流程。
18、进一步的,在步骤s4中,获取usb转串设备的设备节点名称,根据usb转串设备描述信息找到对应的usb转串设备节点。
19、进一步的,在步骤s5中,获取imu装置数据,在内核usb_serial_probe函数中调用call_usermodehelper函数执行用户空间程序,在用户空间程序中打开ttyusbx设备并读取imu装置发送出来的数据。
20、进一步的,在步骤s7中,用户空间程序中创建tty_imu软链接,并指向内核usb转串驱动中检索到的ttyusbx设备节点。
21、一种机器人imu装置自动化配置装置,其特征在于,包括:至少一个存储器和至少一个处理器;
22、所述至少一个存储器,用于存储机器可读程序;
23、所述至少一个处理器,用于调用所述机器可读程序,执行一种机器人imu装置自动化配置方法。
24、本发明的一种机器人imu装置自动化配置方法及装置和现有技术相比,具有以下突出的有益效果:
25、本发明实现了配置的自动化,避免人工干预,并可避免出现人工检查不准确的问题,当出现多个相同的设备编号时,人工方式有可能查看不准确,通过查询数据的方式,可以有效避免出错机率,同时也提升了生产效率。
技术特征:
1.一种机器人imu装置自动化配置方法,其特征在于,在linux内核usb转串驱动中实现,在usb转串设备驱动加载时,获取当前usb转串设备的idvendor及idproduct,判断与imu装置的idvendor及idproduct是否一致,
2.根据权利要求1所述的一种机器人imu装置自动化配置方法,其特征在于,具体步骤如下:
3.根据权利要求2所述的一种机器人imu装置自动化配置方法,其特征在于,在步骤s1中,在linux内核usb转串驱动usb_serial_probe函数中,循环探测读取usb转串设备的描述信息。
4.根据权利要求3所述的一种机器人imu装置自动化配置方法,其特征在于,在步骤s2中,在usb转串设备描述信息中检索出厂商编号idvendor及产品编号idproduct。
5.根据权利要求4所述的一种机器人imu装置自动化配置方法,其特征在于,在步骤s3中,校验usb转串设备的厂商编号idvendor及产品编号idproduct与imu装置的信息是否匹配,如不匹配继续步骤s1进行循环探测,匹配则继续下步流程。
6.根据权利要求5所述的一种机器人imu装置自动化配置方法,其特征在于,在步骤s4中,获取usb转串设备的设备节点名称,根据usb转串设备描述信息找到对应的usb转串设备节点。
7.根据权利要求5所述的一种机器人imu装置自动化配置方法,其特征在于,在步骤s5中,获取imu装置数据,在内核usb_serial_probe函数中调用call_usermodehelper函数执行用户空间程序,在用户空间程序中打开ttyusbx设备并读取imu装置发送出来的数据。
8.根据权利要求5所述的一种机器人imu装置自动化配置方法,其特征在于,在步骤s7中,用户空间程序中创建tty_imu软链接,并指向内核usb转串驱动中检索到的ttyusbx设备节点。
9.一种机器人imu装置自动化配置装置,其特征在于,包括:至少一个存储器和至少一个处理器;
技术总结
本发明涉及IMU装置领域,具体提供了一种机器人IMU装置自动化配置方法及装置,在Linux内核USB转串驱动中实现,在USB转串设备驱动加载时,获取当前USB转串设备的idVendor及idProduct,判断与IMU装置的idVendor及idProduct是否一致,通过调用用户空间程序读取IMU装置实时发送出来的数据,并校验数据是否符合IMU装置数据协议格式,符合则检索IMU装置成功,接下来通过创建软链接生成固定的“tty_imu”设备节点,完成自动化生成配置过程。与现有技术相比,本发明实现了配置的自动化,避免人工干预,并可避免出现人工检查不准确的问题,可以有效避免出错机率,同时也提升了生产效率。
技术研发人员:刘来波,李朝铭,刘鹏,王召东,赵洪宇,蔡萌萌
受保护的技术使用者:山东新一代信息产业技术研究院有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!