一种井下巷道悬线巡检防爆机器人的制作方法
本发明属于机器人,具体是一种井下巷道悬线巡检防爆机器人。
背景技术:
1、在矿业生产过程中,井下巷道中存在有毒、有害气体等危险环境,人工巡检存在很大的危险性。因矿井中复杂路况和设备等因素的影响,路面巡检机器人行走难度高,因此在巷道顶部使用悬线巡检机器人来进行巡检。
2、例如中国专利公告号为cn105666459b的专利公开了井下巷道悬线巡检防爆机器人,包括监控机器人主体、过障机构和行走机构。所述过障机构包括过障导杆、预紧轮、下支架、导向套、预紧弹簧、弹簧调节螺母、销孔和导向槽;所述行走机构包括拉绳、主动轴自由端轴承座、上支架、菱形轴承座、主动轮、主动轴;所述监控机器人主体包括模块搭载框、防爆电池、防爆箱、防爆箱内的控制电路和各种传感器模块。
3、该方案的机器人能在架设好的钢丝绳上以预想的速度平稳爬行,具有上下坡越障碍功能。但机器人仍是通过搭载蓄电池的方式提供电源,在巡检过程中,机器人受蓄电池自身储电量的限制,需要及时返回充电站进行充电。
技术实现思路
1、为了解决上述需要及时返回充电站进行充电问题,本发明的目的是提供一种井下巷道悬线巡检防爆机器人,能判断当前时间机器人执行下一步的巡检指令的耗电量,便于机器人返回充电桩进行充电。
2、为了实现上述目的,本发明的技术方案如下:
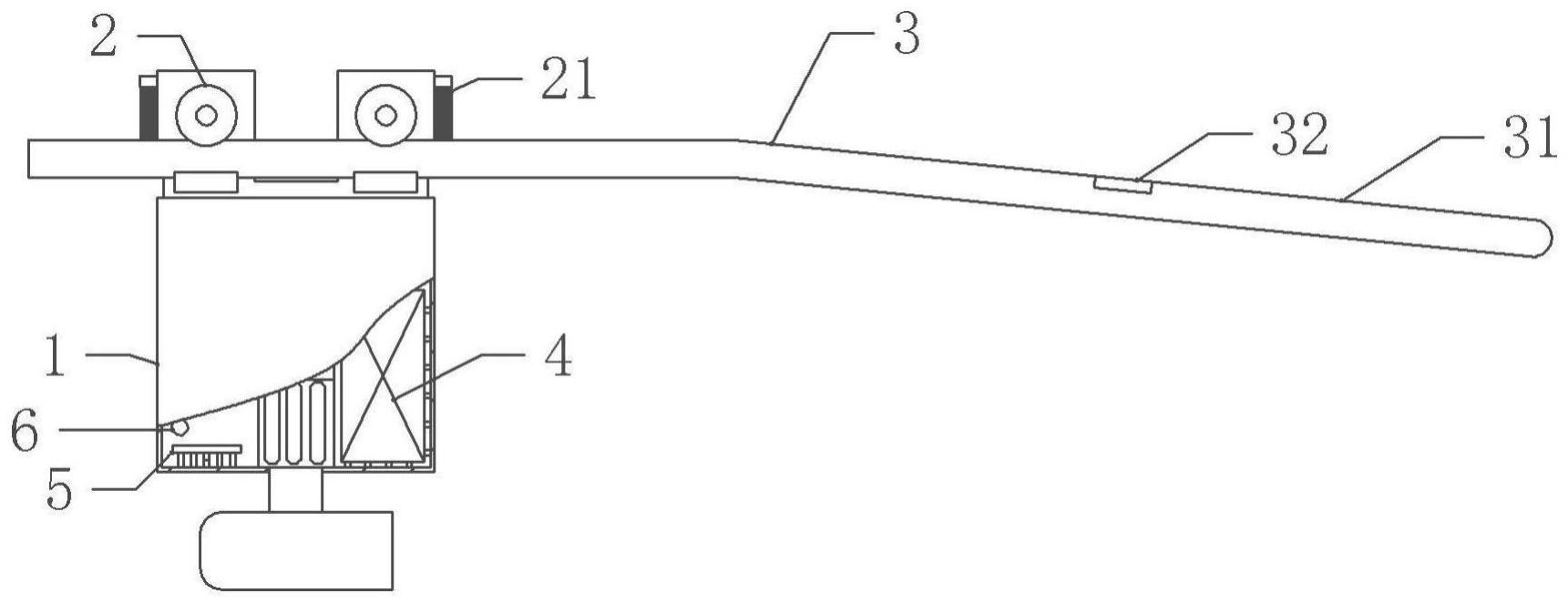
3、一种井下巷道悬线巡检防爆机器人,包括机器人本体和轨道,机器人本体顶部设有行走机构,机器人本体通过行走机构放置在轨道上;机器人本体内部固定连接有控制面板和蓄电池,控制面板电连接有声波传感器,声波传感器固定连接在机器人本体上;
4、所述控制面板,用于接收任务中心发出当前时间的下一步巡检指令,将下一步巡检指令的最终目的点输入线路模型中,计算得到机器人所需耗电量a,基于当前时间蓄电池的电量,得到机器人到达最终目的点的剩余存电量,并计算最终目的点与最近的充电桩之间所需耗电量b;
5、控制面板将耗电量b与剩余存电量进行对比,若耗电量b大于剩余存电量,则终止,机器人在执行完当前的巡检指令后返回最近的充电桩;若耗电量b小于剩余存电量,则发送通过指令至控制面板,控制面板基于通过指令执行下一步巡检指令;
6、轨道上固定连有若干射频模块,射频模块与控制面板电连接;
7、所述控制面板还用于通过发射天线不间断的发送一定频率的射频信号,当射频模块进入发射天线的工作区域时,射频模块会产生感应电流,射频模块获得能量被激活,同时,射频模块向控制面板发送减速信号,控制面板基于减速信号减缓行走机构的转速。
8、采用上述方案后实现了以下有益效果:(1)通过轨道上的射频模块,便于机器人调整行进速度,便于机器人进行爬坡或下坡,减少巡检过程中的耗电量,提高续航能力。
9、(2)通过声波传感器,便于辅助判断轨道是否发生断裂或堵塞(因井下巷道塌方或其他原因导致),便于机器人更换巡检路线继续进行巡检。
10、(3)控制面板通过对蓄电池的电量进行监控,能判断当前时间机器人执行下一步的巡检指令的耗电量,机器人执行下一步任务中心发送的巡检指令的合理性,便于机器人及时返回充电桩进行充电,保障机器人的巡航效率。
11、进一步,机器人本体内固定连接有蓄电池,蓄电池包括内壳和若干电芯,内壳外壁上固定连接有外壳,内壳与外壳之间设有空隙;
12、外壳内连通有若干管道,管道周向布置在外壳上,管道远离外壳的一端连通有储液罐,储液罐内存放的物质包括但不限于型号为f860的防火胶,管道上均分别连通有第一管和第二管,管道通过第一管与空隙连通,且第一管上连通有第一电磁阀;第二管位于外壳内,且第二管上连通有第二电磁阀;所述第一电磁阀和第二电磁阀的常态为常闭,第一电磁阀和第二电磁阀与控制面板电连接;
13、蓄电池一侧固定连接有温度传感器,温度传感器的探头位于蓄电池内,且温度传感器与控制面板电连接;
14、所述控制面板基于温度传感器检测的实时温度数据,将实时温度数据与设定的阈值进行对比,若实时温度数据小于阈值,则终止,若实时温度数据大于阈值,则断开蓄电池的线路开关,并启动第一电磁阀。
15、有益效果:通过温度传感器对蓄电池内部的温度进行检测,便于控制面板根据机器人内部的温度情况进行断电,在充电过程以及巡检过程中,通过打开第一电磁阀,管道通过第一管向空腔内注入防火胶,隔绝外界空气进入蓄电池,使蓄电池内部不满足燃烧条件,蓄电池内部不能进行燃烧,起到防爆作用。
16、进一步,所述控制面板还用于在一定时间内,计算实时温度数据的变化值,若变化值大于设定的警示值,则启动第一电磁阀和第二电磁阀;若变化值小于设定的警示值,则将实时温度数据与设定的阈值进行对比,若实时温度数据小于阈值,则终止,若实时温度数据大于阈值,则启动第一电磁阀。
17、有益效果:控制面板能根据机器人内部的温度情况进行断电的同时,控制面板还能基于蓄电池的升温快慢,打开第一电磁阀和第二电磁阀,管道通过第二管注入防火胶填充满蓄电池内部的空间,防火胶能起到隔绝相邻电芯的作用。
18、进一步,轨道一侧设有充电桩,轨道靠近充电桩的一侧固定连接有倾斜的斜坡,斜坡远离轨道的一侧低于斜坡靠近轨道的一侧,且斜坡远离轨道的一侧与地面平行。
19、有益效果:倾斜的斜坡能减少机器人回程所需的电量,便于机器人回程进行充电;斜坡远离轨道的一侧与地面平行,便于机器人的充电口与充电桩连接。
20、进一步,所述减速信号包括爬坡指令、下爬指令和到达指令,控制面板基于爬坡指令和下爬指令减缓行走机构的转速;控制面板基于到达指令向任务中心发送充电指令。
21、有益效果:爬坡指令、下爬指令和到达指令分别对应不同坡度大小的轨道,能减少机器人在巡检过程中的能耗,便于机器人巡检;其中到达指令能表明机器人正在进行充电,使任务中心不再发送下一步巡检指令至该机器人。
22、进一步,机器人本体上固定连接有若干刷毛,刷毛位于轨道的上方。
23、有益效果:在机器人巡检过程中,刷毛便于清洗轨道上的灰尘,使灰尘不沾在行走机构的轮子上,便于机器人进行巡检。
24、进一步,轨道顶部刻有若干花纹。
25、有益效果:花纹能增大行走机构的轮子与轨道之间的摩擦系数,便于机器人在轨道上进行移动。
26、进一步,机器人本体内固定连接有重心检测机构,重心检测机构包括壳体,壳体内壁上固定连接有中心轴,中心轴位于壳体高度方向的四分之一处,且中心轴上转动配合有拉绳;
27、拉绳远离中心轴的一端固定连接有敲击块,壳体下部呈圆形,壳体内壁上分别固定连接有第一压力传感器和第二压力传感器,第一压力传感器和第二压力传感器位于敲击块的两侧,且当敲击块绕中心轴运动到最远点时,敲击块能与第一压力传感器和第二压力传感器相接触,第一压力传感器和第二压力传感器与控制面板电连接;
28、所述控制面板还用于接收第一压力传感器和第二压力传感器的压力数据,若压力数据大于设定的阈值,控制面板并减缓行走机构的转速;若压力数据小于设定的阈值,则终止;
29、同时,控制面板计算第一压力传感器和第二压力传感器的接收时间之间的相差值,若相差值大于空白时间,则终止,若相差值小于空白时间,控制面板则将该路段进行标记,并发送至任务中心,控制面板并减缓行走机构的转速。
30、有益效果:由于机器人在轨道上进行运动,敲击块因自身重力与地面保持竖直状态,通过敲击块对第一压力传感器和第二压力传感器的施压情况,能判断机器人是否在进行爬坡或下坡,便于控制面板调节行走机构的功率,减少能耗,提高机器人的巡航能力。通过控制面板计算第一压力传感器和第二压力传感器的接收时间之间的相差值,便于判断轨道上是否有杂物或轨道不平整,便于提醒工作人员进行修复,便于后续机器人进行巡检。
- 还没有人留言评论。精彩留言会获得点赞!