一种手动调节变刚度模块及关节机构
本发明涉及机器人,尤其是涉及一种手动调节变刚度模块及关节机构。
背景技术:
1、随着科技的不断进步,以工业机器人为代表的机器人技术已经到达了很高的水平,人机交互技术也得到了长足的进步,人机协作日益密切,康复医疗领域也越来越重视机器人的应用。这些都对人机交互的安全性提出了要求。
2、除此之外,我国老龄化人口逐渐增多,老年人群的较高发病率及生活辅助等诸多问题也逐渐得到重视,尤其是肢体功能障碍患者,为了提高其生活自理能力,需要通过使用代偿性假肢来代替患肢行使功能。同样的,在康复训练领域,康复机器人也逐渐普及。而使用康复器械代替治疗师训练就需要考虑人机交互和机器人的柔顺性和兼容性,但是,传统的刚性机器人出现故障导致运动失控,不仅会对附近的操作者带来危险,也会对机器人本身带来损害。
3、为了保护人和机器使之免受冲击并适应不同的环境及任务和满足即时调整刚度的要求,研究人员开发不同的可变刚度关节,以在主动训练和抗阻训练阶段跟随患者肢体,并且需要并分别给患者肢体施加不同的作用力,以保证康复过程的安全性和舒适性,增强康复训练的效果。现有的主动变刚度驱动器由于添加了新的电机作为刚度调节的动力源,整个关节机电系统还需要引入新的控制器及对应的角度测量元器件,使得关节的结构变得很复杂、体积大、重量大,又因其引入了新的控制信号导致控制系统冗余,加大控制难度,价格也会普遍较高。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种手动调节变刚度模块及关节机构。
2、本发明的目的可以通过以下技术方案来实现:
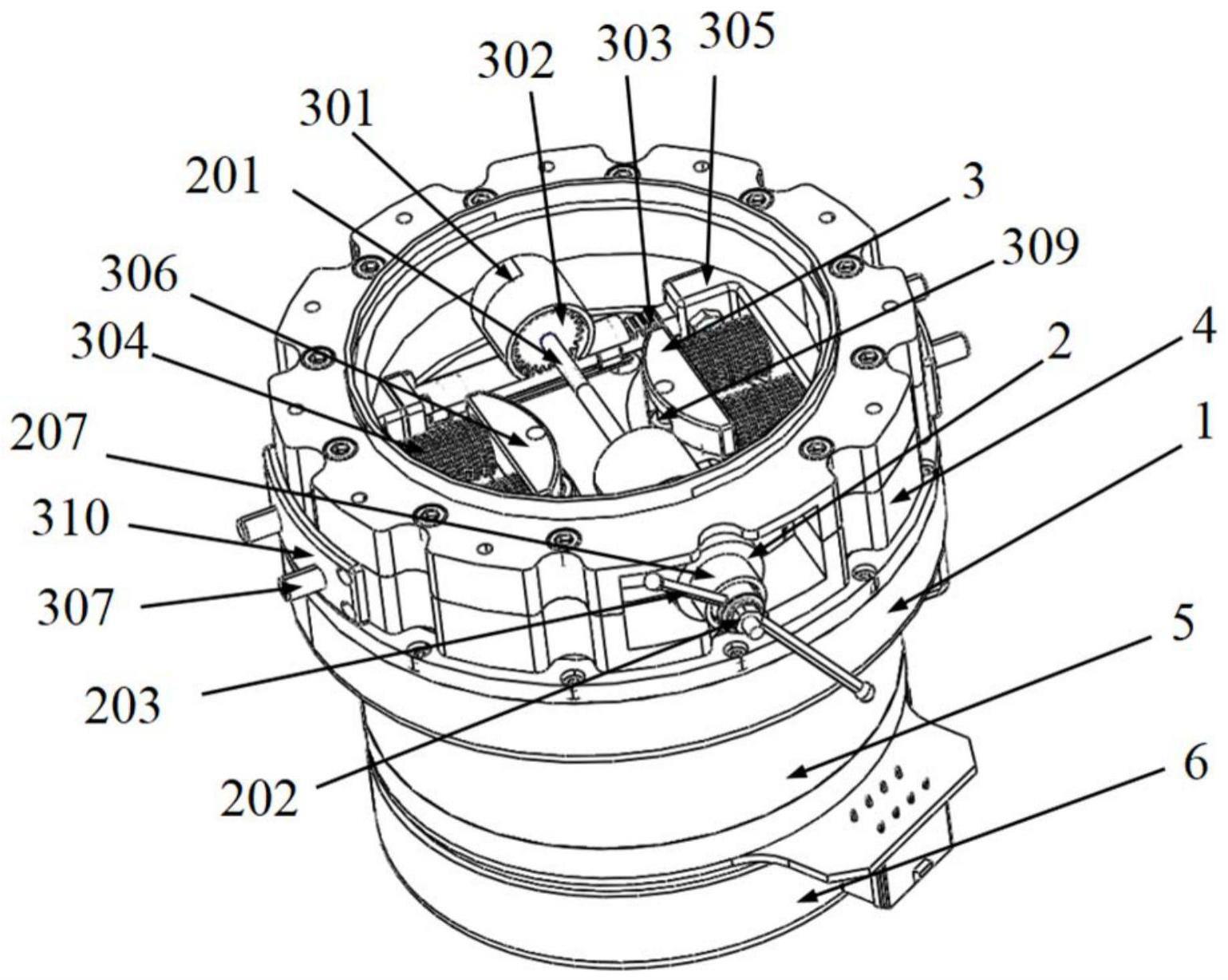
3、根据本发明的第一方面,提供一种手动调节变刚度模块,包括底座、自锁机构、刚度调节机构和凸轮;
4、所述凸轮通过轴承可转动地设置在底座的上方,所述底座的顶面设有双曲面结构形状的凸起;
5、所述刚度调节机构包括第一弹性单元、第二弹性单元和2套运动单元,所述第一弹性单元和第二弹性单元的结构相同,包括弹簧结构、弹簧压缩块、导向支撑架、导向杆、直线轴承、凸轮随动件;所述弹簧压缩块的第一端为与凸轮内壁弧度匹配的圆弧形结构,所述弹簧结构的两端分别连接弹簧压缩块的第二端和导向支撑架的第一端,所述凸轮随动件安装在导向支撑架的第二端,所述第一弹性单元和第二弹性单元的凸轮随动件的侧面分别接触底座上凸起两侧的曲面外轮廓;所述导向杆穿过凸轮侧壁后与导向支撑架相连,所述导向杆与凸轮侧壁之间通过直线轴承相连,所述弹簧压缩块与所述导向杆滑动连接;
6、所述运动单元包括齿轮齿条外壳、齿轮、齿条、齿条导向圈,2套所述运动单元的齿轮齿条外壳分别与第一弹性单元的弹簧压缩块的两侧固定连接,所述齿条的第一端为自由端,设置在齿轮齿条外壳内,所述齿条的第二端伸出齿轮齿条外壳并与第二弹性单元的弹簧压缩块固定连接,所述齿条导向圈设置在齿轮齿条外壳内,用于引导定位齿条,2套运动单元的齿条平行设置,所述齿轮置于齿轮齿条外壳内,且齿轮与齿条啮合;
7、所述自锁机构与运动单元适配,用于带动齿轮转动,齿条与所述齿轮相向运动,进而带动第一弹性单元和第二弹性单元的弹簧压缩块运动以改变第一弹性单元和第二弹性单元的弹簧结构的势能。
8、进一步地,所述自锁机构包括螺杆、螺帽、手柄、弹簧压缩件、直线弹簧和自锁外壳;所述螺杆的第一端伸入凸轮内,所述螺杆的第二端设置在凸轮以外,所述2套运动单元的齿轮与所述螺杆相连,所述凸轮侧壁上设有穿越口,所述自锁外壳与2套运动单元中距离穿越口最近的齿轮齿条外壳相连,所述自锁外壳被容纳于穿越口中;所述弹簧压缩件与螺杆相连,所述直线弹簧套设在螺杆上,所述直线弹簧的两端分别与弹簧压缩件的第一端和齿轮齿条外壳相接触,所述弹簧压缩件和直线弹簧设置在自锁外壳与齿轮齿条外壳之间形成的容纳空间内,所述手柄和螺帽安装在螺杆的第二端并设置在自锁外壳与齿轮齿条外壳之间形成的容纳空间外,所述螺帽与手柄非固定连接,所述弹簧压缩件的第二端设有与手柄适配的卡合结构,所述自锁外壳上设有适配弹簧压缩件第二端的开口,弹簧压缩件的第二端通过所述开口伸出自锁外壳;
9、当不对手柄施加外力时,在直线弹簧回复力的作用下弹簧压缩件贴紧自锁外壳,螺杆的转动角度被固定;当沿螺杆轴向向凸轮方向推动手柄时所述弹簧压缩件随之运动并压缩直线弹簧使得弹簧压缩件与自锁外壳分离;在弹簧压缩件与自锁外壳分离时所述弹簧压缩件的第二端与手柄在外力和直线弹簧回复力的作用下卡接,螺杆随所述手柄和弹簧压缩件的转动而转动,螺杆的转动带动所述齿轮转动。
10、进一步地,所述第一弹性单元和第二弹性单元中,弹簧结构包括两个平行的蝶形弹簧,所述导向杆的数量为2个,两个蝶形弹簧分别套设在导向杆上。
11、进一步地,所述凸轮侧壁设有与导向杆适配的通孔,所述直线轴承安装在所述通孔内,所述直线轴承径向外壁与所述通孔接触,直线轴承径向内壁与所述导向杆接触,所述直线轴承轴向一侧接触通孔内壁,所述直线轴承轴向另一侧接触直线轴承固定片,所述直线轴承固定片设置在凸轮外壁上。
12、进一步地,所述运动单元中,齿条导向圈的数量为多个,所述齿条导向圈与齿轮齿条外壳相连,齿条与所述齿条导向圈滑动连接。
13、进一步地,所述手柄包括套筒和把手,所述套筒套设在螺杆上,所述把手与套筒相连,所述套筒端面上设有多个滚珠,多个滚珠沿套筒端面的周向均匀设置,所述弹簧压缩件的第二端设有与所述多个滚珠的大小和位置适配的凹面。
14、进一步地,所述螺杆为分体式结构,包括第一螺杆和第二螺杆,所述第一螺杆的第一端和第二螺杆的第二端设有适配的连接结构,所述手柄安装在第一螺杆的第二端,2套运动单元的齿轮分别与第一螺杆和第二螺杆相连。
15、进一步地,所述第一螺杆上设有突起部分和卡簧槽,所述齿轮设置在突起部分和卡簧槽之间,所述齿轮一端贴合突起部分,另一端通过安装在卡簧槽内的卡簧与第一螺杆相连,所述突起部分与齿轮齿条外壳之间通过轴承相连;
16、所述第二螺杆上设有突起部分和卡簧槽,所述齿轮设置在突起部分和卡簧槽之间,所述齿轮一端贴合突起部分,另一端通过安装在卡簧槽内的卡簧与第二螺杆相连,所述突起部分与齿轮齿条外壳之间通过轴承相连。
17、进一步地,所述第一螺杆的第一端设有内孔,所述第二螺杆的第二端设有与所述内孔长度、截面适配的连接段,或者,所述第二螺杆的第二端设有内孔,所述第一螺杆的第一端设有与所述内孔长度、截面适配的连接段。
18、根据本发明的第二方面,提供一种手动调节变刚度关节机构,包括位置控制模块和上述的变刚度模块,所述位置控制模块包括电机外壳、位置电机、法兰盘和谐波减速器,所述位置电机安装在电机外壳上,法兰盘分别与位置电机的输出轴和谐波减速器连接,所述谐波减速器与变刚度模块的底座连接,所述法兰盘随位置电机的输出轴转动而转动,法兰盘的转动带动谐波减速器随之转动,谐波减速器的转动带动变刚度模块的底座随之转动,当底座转动时与底座凸起的曲面外轮廓相接触的凸轮随动件随之沿所述底座凸起的曲面外轮廓滚动,从而改变第一弹性单元和第二弹性单元的弹簧结构的势能。
19、与现有技术相比,本发明具有以下有益效果:
20、(1)底座上只有双曲面凸起结构作为输入端,自锁机构与变刚度模块均集成至输出端,集成度高,极大节约了变刚度关节的空间,这种模块化设计容易装卸、维护简单,方便患者佩戴,适用范围广。
21、(2)在变刚度模块中加入了自锁机构,通过手动调节变刚度机器人关节,可以根据应用场景的不同即时调节关节刚度值,成本低廉,结构简单。
22、(3)自锁机构通过按压和转动手柄从而压缩弹簧,使得弹簧压缩件与自锁外壳分离,来转动齿轮,从而预调节弹簧刚度,弹簧回弹压缩弹簧压缩件,使弹簧压缩件与自锁外壳接触产生摩擦从而实现自锁,独有的刚度调节性使其具有一定的抗冲击能力,在发生紧急事故时,可以保证人机交互的安全性,刚度预调节功能完善,操作简便。
- 还没有人留言评论。精彩留言会获得点赞!