一种油管搬运机器人关节轨迹规划方法与流程
本发明属于油管搬运机器人关节轨迹规划,尤其涉及一种油管搬运机器人关节轨迹规划方法。
背景技术:
1、石油油管搬运机器人被广泛地应用于油田油管加工、修复、喷漆、检测等工序中。但由于油管长度长、重量大,且搬运机器人连杆机构的关节较多,因此对油管搬运机器人关节轨迹的规划将直接影响到工序任务的完成质量及完成效率。此外,冗余的关节轨迹也会无端增加机器人运行能耗,降低搬运机器人的使用效果。
2、进一步研究后发现,由于轨迹规划和关节运动具有直接的重要关系,受各种几何误差和非几何误差的影响,关节之间的空间相关性是高度动态的,因此,有必要建立一种可靠、合理的关节轨迹规划方法,从而提高搬运机器人在各工序中的运行效率,降低搬运机器人的运行能耗。
技术实现思路
1、本发明提供了一种油管搬运机器人关节轨迹规划方法,该种油管搬运机器人关节轨迹规划方法按照任务要求,可实时求解各关节运动的位移、速度和加速度,从而为生成关节轨迹提供帮助。利用该方法进行关节轨迹的实时规划,可有效提高机器人关节的运动效率,降低运动能耗,最终可按照各种需求优化机器人的关节轨迹。
2、为解决上述技术问题,本发明采用了如下技术方案:
3、一种油管搬运机器人关节轨迹规划方法,包括有如下步骤:
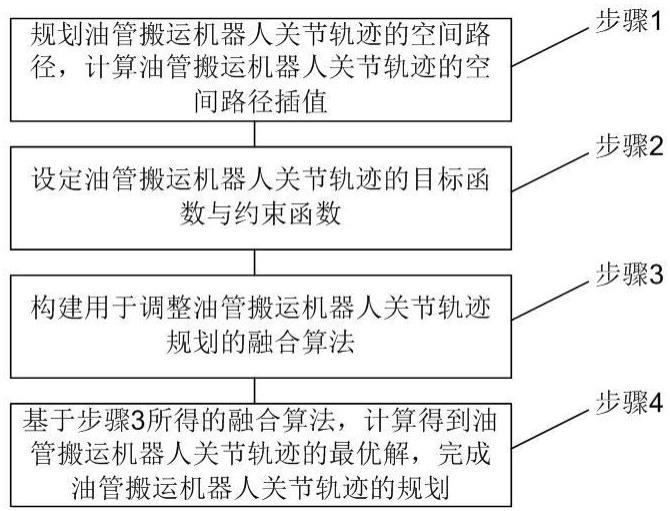
4、步骤1:规划油管搬运机器人关节轨迹的空间路径,计算油管搬运机器人关节轨迹的空间路径插值;
5、步骤2:设定油管搬运机器人关节轨迹的目标函数与约束函数;
6、步骤3:构建用于调整油管搬运机器人关节轨迹规划的融合算法;
7、步骤4:基于步骤3所得的融合算法,计算得到油管搬运机器人关节轨迹的最优解,完成油管搬运机器人关节轨迹的规划。
8、较为优选的,所述步骤1具体可描述为:
9、采用三次均匀b样条曲线,实现对油管搬运机器人关节轨迹的空间路径的插值计算;
10、其中,插值计算的数学表达式为:
11、
12、其式(1)中,θi(u)为样条曲线对应于参数u的第i段点的矢量值,u∈[0,1];vi+j-1为样条曲线的控制点;
13、bj,3(u)为多项式,具体可描述为:
14、
15、将式(2)改写为矩阵形式,得到:
16、
17、为了保证b样条轨迹的连续性,令前一段轨迹的末端矢量与后一段轨迹的首端矢量相等,可得:
18、
19、其中,pi为轨迹上的型值点;
20、由n个型值点确定n个方程,并添加边界条件,求出所有未知数;其中,添加的边界条件,满足:
21、
22、基于式(5)中的vi-1,vi,vi+1,vi+2,得到b样条曲线,满足:
23、
24、假设b样条曲线上控制点为vi(ti,qi),则b样条曲线上第i段轨迹的油管搬运机器人关节角度变化q(u)及时间变化t(u)分别满足:
25、
26、较为优选的,所述步骤2具体可描述为:
27、以油管搬运机器人关节运动时间最短为目标函数,对油管搬运机器人关节轨迹的路径进行优化;
28、目标函数的数学模型可以表示为:
29、
30、其中,hi为每段油管搬运机器人关节轨迹的运行时间;t为整段油管搬运机器人关节轨迹的总时间;
31、对油管搬运机器人关节轨迹的速度做如下约束:
32、对b样条曲线求导,得到油管搬运机器人关节的速度表达式
33、
34、其式(9)也可以表达为:
35、
36、对油管搬运机器人关节轨迹的加速度做如下约束:
37、对式(9)所示的油管搬运机器人关节的速度表达式求导,得到油管搬运机器人关节的加速度表达式
38、
39、其式(11)也可以表达为:
40、
41、综合油管搬运机器人关节的速度表达式油管搬运机器人关节的加速度表达式得到的约束函数可以表达为:
42、
43、较为优选的,所述步骤3具体可描述为:
44、依托woa算法的捕食机制,结合sma算法中的参数以及表征每个黏菌个体的适应度权重,构建形成用于调整油管搬运机器人关节轨迹规划的融合算法;
45、其中,woa算法的捕食机制包括有包围猎物、动态螺旋捕食以及全局探索阶段的三个阶段。
46、较为优选的,所述woa算法中包围猎物的过程具体可描述为:
47、假设参与捕食的种群数量为n,所探索空间的维度为d;在第t次迭代时,第i个个体在第d维空间中的位置可以表示为:
48、xnt=(xn1,xn2,...,xnd),n=1,2,...,n (14);
49、迄今为止的最优位置表示为猎物位置,将其定义为:
50、
51、随着迭代次数增加,最优位置也被逐渐被更新替换;因为初始种群没有先验经验,鲸鱼最初选用随机个体位置作为寻找目标,其寻找包围猎物的过程可以表示为:
52、
53、其中,d为当前个体与当前最优个体的距离,即包围步长,满足:
54、
55、其中,rrand为[0,1]的随机向量;式(16)中a为系数向量,满足:
56、a=2a·rrand-a (18);
57、为了适应复杂的非线性搜索过程,将a定义为:
58、a=arc tanh(-t/tmax+1) (19)。
59、较为优选的,所述woa算法中动态螺旋捕食的过程具体可描述为:
60、当个体围绕猎物游动时,做螺旋式运动;同时引入动态参数vb和动态权重ω,根据迭代次数的不同,动态更新捕食运动范围,自适应调整捕食范围和速度;
61、该过程的数学模型可以表示为:
62、
63、其中,vb为[-a,a]的向量参数,b为定义对数螺旋形状的常数,i为[-1,1]之间的随机数;
64、d’为第t次迭代中当前个体与最优个体的距离,满足:
65、
66、ω表征每个黏菌个体的适应度权重,自适应调整当前个体与最优个体之间的距离,加快收敛速度;其中,ω值可表示如下:
67、
68、其中,firsthalf表示fi排在前一半的种,bf表示在当前迭代过程中获得的最优适应度,wf表示当前迭代过程中得到的最差适应度值,sort(fi)表示适应度序列,r为[0,1]的随机值。
69、较为优选的,所述woa算法中全局探索阶段的过程具体可描述为:
70、其中,全局探索阶段模拟个体根据彼此位置随机寻找食物的过程,该过程的数学模型可以表示为:
71、
72、其中,xtr为随机选取的鲸鱼个体位置,参数向量a与前面设定一致;d”为第t次迭代中当前个体xit与随机个体xtr之间的距离,满足:
73、
74、本发明提供了一种油管搬运机器人关节轨迹规划方法,该油管搬运机器人关节轨迹规划方法具体包括有如下步骤:步骤1:规划油管搬运机器人关节轨迹的空间路径,计算油管搬运机器人关节轨迹的空间路径插值;步骤2:设定油管搬运机器人关节轨迹的目标函数与约束函数;步骤3:构建用于调整油管搬运机器人关节轨迹规划的融合算法;步骤4:基于步骤3所得的融合算法,计算得到油管搬运机器人关节轨迹的最优解,完成油管搬运机器人关节轨迹的规划。具有上述步骤特征的油管搬运机器人关节轨迹规划方法,其通过对油管搬运机器人关节轨迹的规划,按照任务要求,实时求解各关节运动的位移、速度和加速度,从而生成具体的油管搬运机器人关节轨迹。并可利用该方法对油管搬运机器人关节轨迹进行实时规划,提高了油管搬运机器人关节轨迹多运动效率,降低了运动能耗,最终实现按照各种需求优化油管搬运机器人关节轨迹的目的。
- 还没有人留言评论。精彩留言会获得点赞!