一种用于工业机器人拧钉的钉孔位置定位方法
本发明涉及智能制造技术中的工业机器人智能装配领域,尤其涉及一种用于工业机器人拧钉的钉孔位置定位方法。
背景技术:
1、随着工业机器人精度、可靠性的不断提高,工业机器人在制造装配领域的应用越来越广泛,对工业机器人装配的智能化要求越来越高。工业机器人安装拧钉末端执行器进行拧钉作业,可以实现无人化装配作业,降低了人工劳动成本,提高了装配效率。采用工业机器人携带拧钉末端执行器进行拧钉作业,需要准确计算出每个钉孔位置,得到工业机器人拧钉每个钉孔时的工业机器人位姿参数。
2、传统的工业机器人拧钉位置确定方法采用人工示教方式,每一个钉孔均需要提前进行工业机器人位置示教,这种方式增加了人工作业强度,灵活性差,同时由于每个工件安装固定存在偏差,每个工件加工制造钉孔位置一致性差,导致采用人工示教方法不适用于流水线装配作业。
3、因此如何优化工业机器人位姿,并实现一种简洁高效且精度高的工业机器人拧钉方案,成为了需要研究的课题。
技术实现思路
1、本发明的实施例提供一种用于工业机器人拧钉的钉孔位置定位方法,应用在工业机器人拧钉的钉孔位置检测定位精度方面,对双目视觉检测装置与工业机器人法兰盘的手眼标定精度要求低,可以有效减少标定误差对钉孔位置检测定位精度的影响,提高了钉孔位置检测定位效率和精度。
2、为达到上述目的,本发明的实施例采用如下技术方案:
3、一种用于工业机器人拧钉的钉孔位置定位方法,所述方法用于一种工业机器人拧钉系统,所述系统中包括:双目视觉检测装置、辅助光源、工业机器人和拧钉末端执行器,其中,所述双目视觉检测装置的组成部分包括两台工业相机;
4、所述方法包括:
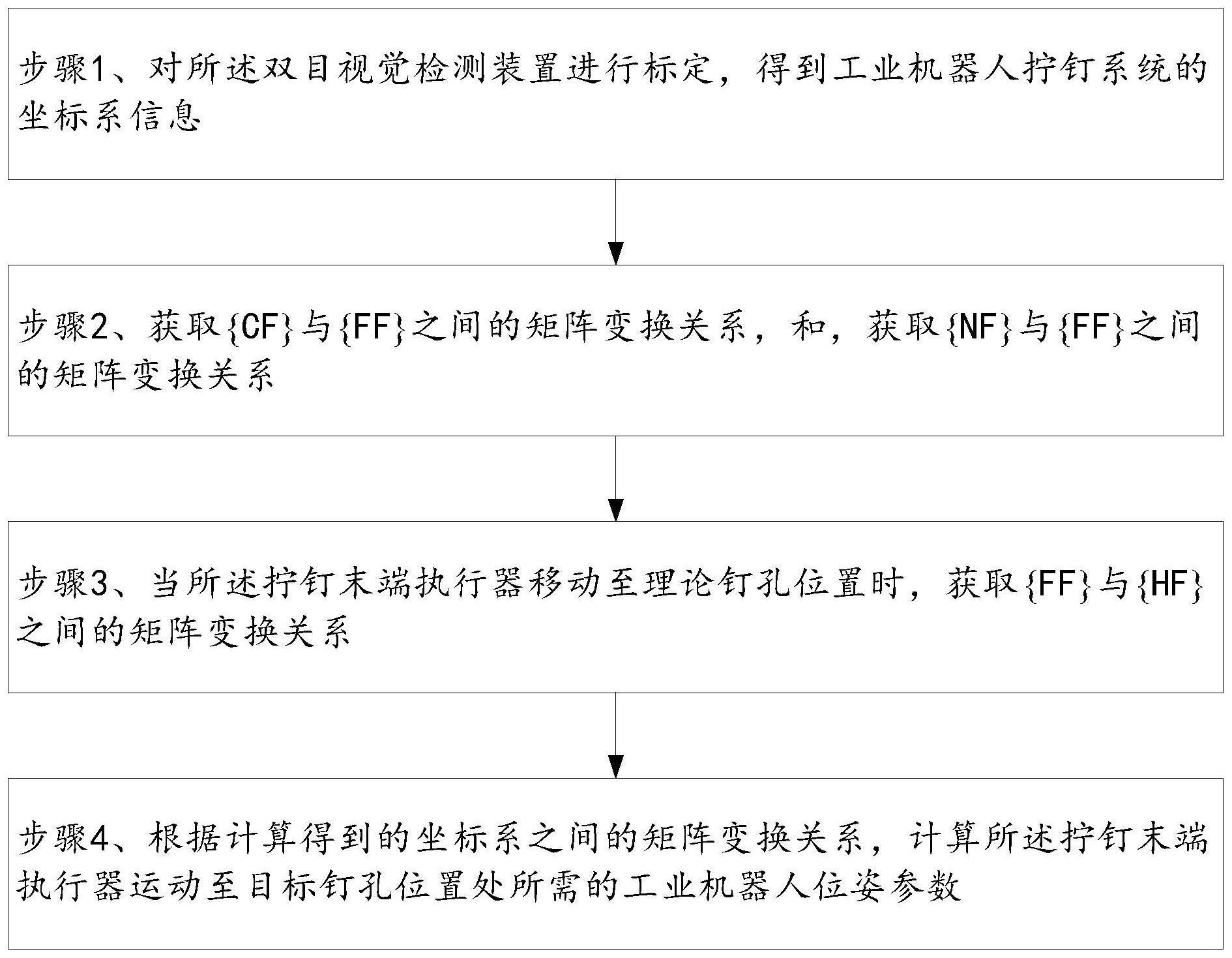
5、步骤1、对所述双目视觉检测装置进行标定,得到工业机器人拧钉系统的坐标系信息,所述坐标系信息包括:所述工业机器人的基坐标系{bf}、所述工业机器人的法兰盘坐标系{ff}、所述双目视觉检测装置的坐标系{cf}、所述拧钉末端执行器的坐标系{hf}和钉孔坐标系{nf};
6、步骤2、获取{cf}与{ff}之间的矩阵变换关系和,获取{nf}与{ff}之间的矩阵变换关系
7、步骤3、当所述拧钉末端执行器移动至理论钉孔位置时,获取{ff}与{hf}之间的矩阵变换关系
8、步骤4、根据计算得到的坐标系之间的矩阵变换关系,计算所述拧钉末端执行器运动至目标钉孔位置处所需的工业机器人位姿参数。
9、本发明实施例提供的用于工业机器人拧钉的钉孔位置定位方法,利用两台工业相机及镜头标定组成为双目视觉检测装置,分别标定双目视觉检测装置坐标系、拧钉末端执行器坐标系与工业机器人法兰盘坐标系之间的矩阵变换关系;然后计算拧钉末端执行器在示教钉孔位置处的工业机器人位姿,采集双目视觉检测装置在检测示教钉孔时的工业机器人位姿和示教钉孔图像信息,计算拧钉末端执行器运动至示教钉孔位置时示教钉孔坐标系和工业机器人法兰盘坐标系之间的矩阵变换关系;最后双目视觉检测装置检测任意钉孔,通过矩阵变换关系,计算拧钉末端执行器运动至钉孔时工业机器人所需位姿参数。具体的,通过双目视觉检测装置对钉孔位置进行检测定位,通过矩阵转换求解得到工业机器人拧钉所需的工业机器人位姿参数,避免了人工示教钉孔位置的繁重工作,同时解决了因工件制造、安装导致的钉孔位置偏移,双目视觉检测装置与工业机器人法兰盘标定误差对钉孔位置检测精度的影响。
技术特征:
1.一种用于工业机器人拧钉的钉孔位置定位方法,其特征在于,所述方法用于一种工业机器人拧钉系统,所述系统中包括:双目视觉检测装置、辅助光源、工业机器人和拧钉末端执行器,其中,所述双目视觉检测装置的组成部分包括两台工业相机;
2.根据权利要求1所述的方法,其特征在于,所述双目视觉检测装置的两台工业相机配套连接件固定安装至所述工业机器人的法兰盘上;
3.根据权利要求1所述的方法,其特征在于,所述对所述双目视觉检测装置进行标定,包括:
4.根据权利要求2或3所述的方法,其特征在于,所述对所述双目视觉检测装置进行标定,包括:
5.根据权利要求1所述的方法,其特征在于,在步骤2中,包括:
6.根据权利要求1所述的方法,其特征在于,在步骤3中包括:
7.根据权利要求6所述的方法,其特征在于,所述采集所述示教钉孔的图像数据并计算所述示教钉孔的中心在{cf}中的三维坐标值,包括:
8.根据权利要求6所述的方法,其特征在于,在步骤4中,包括:
9.根据权利要求8所述的方法,其特征在于,在步骤4中,包括:针对不同钉孔采用不同的拧钉末端执行器姿态的需求,根据工业机器人法兰盘坐标系{ff}和拧钉末端执行器坐标系{nf}之间的矩阵变换关系建立矩阵转换关系,计算拧钉末端执行器坐标系姿态变换前后的矩阵变换关系计算得到拧钉末端执行器以新的姿态移动至钉孔位置所需的工业机器人法兰盘坐标系相对于工业机器人基坐标系矩阵变换关系其中,
技术总结
本发明实施例公开了一种用于工业机器人拧钉的钉孔位置定位方法,涉及智能制造技术领域,对双目视觉检测装置与工业机器人法兰盘的手眼标定精度要求低,可以有效减少标定误差对钉孔位置检测定位精度的影响,提高了钉孔位置检测定位效率和精度。本发明包括:对所述双目视觉检测装置进行标定,得到工业机器人拧钉系统的坐标系信息;获取{CF}与{FF}之间的矩阵变换关系,和,获取{NF}与{FF}之间的矩阵变换关系;当所述拧钉末端执行器移动至理论钉孔位置时,获取{FF}与{HF}之间的矩阵变换关系;根据计算得到的坐标系之间的矩阵变换关系,计算所述拧钉末端执行器运动至目标钉孔位置处所需的工业机器人位姿参数。
技术研发人员:李鹏程,张奇,王忠康,田威,叶昶君,刘明轩,孔玲怡
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!