一种机器人的标定方法及相关装置与流程
本申请涉及机器人,尤其涉及一种机器人的标定方法及相关装置。
背景技术:
1、随着电力基建的快速发展,机器人在其中发挥着越来越重要的作用。在电力基建施工方面,已经踊跃出一定规模的施工机器人进行生产运营。而由于电力设备重量和体型大,安装施工空间小,以及变电站内环境比较复杂等因素,使得对于电力设备安装机器人的定位要求较高。
2、当前机器人运动学标定模型多采用d-h模型,该标定模型存在奇异性、参数冗余现象;而且在辅助施工机器人的往复运输工作中,随着时间和机器人结构发生的细微变化会带来一定的误差,会造成机器人定位不准确,机器人的工作空间不确定;使得现有方法无法满足电力设备安装机器人的定位精度的要求,进一步地,现有的标定方法中测量系统难以实现在线自动标定的难题。
技术实现思路
1、本申请提供了一种机器人的标定方法及相关装置,用于解决现有技术标定自动化程度低且定位精度较低的问题。
2、有鉴于此,本申请第一方面提供了一种机器人的标定方法,所述方法包括:
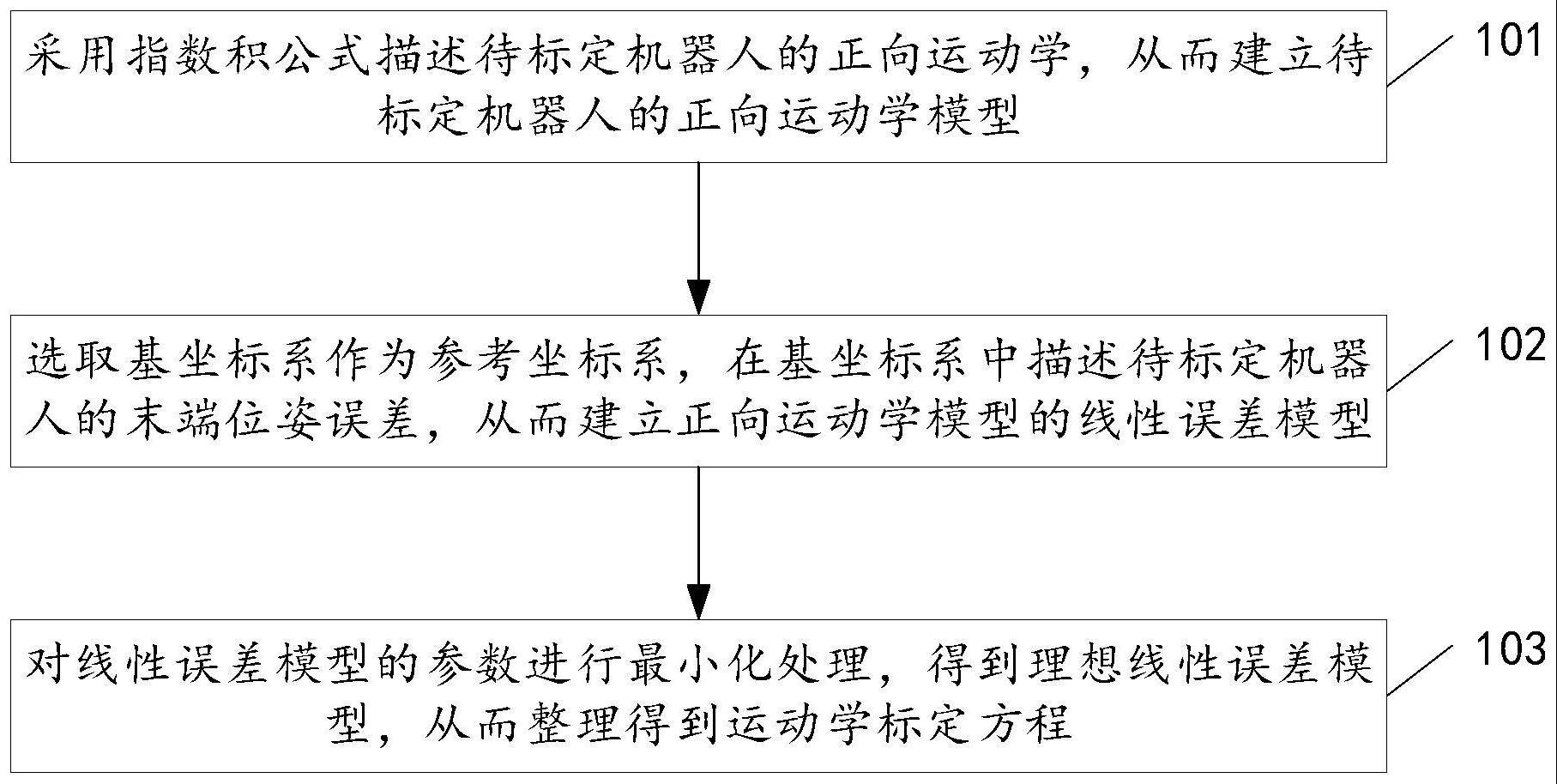
3、采用指数积公式描述待标定机器人的正向运动学,从而建立待标定机器人的正向运动学模型;
4、选取基坐标系作为参考坐标系,在基坐标系中描述待标定机器人的末端位姿误差,从而建立所述正向运动学模型的线性误差模型;
5、对所述线性误差模型的参数进行最小化处理,得到理想线性误差模型,从而整理得到运动学标定方程。
6、可选地,所述对所述线性误差模型的参数进行最小化处理,得到理想线性误差模型,从而整理得到运动学标定方程,之后还包括:
7、s01、根据待标定机器人的标准尺规图,建立待标定机器人的旋量模型,在基于视觉测量的标定系统下随机生成若干个末端位姿测量值,根据所述旋量模型生成待标定机器人的运动学参数理论值,并预设实际值;
8、s02、根据待标定机器人的运动学参数实际值和所述末端位姿测量值,计算关节角度,根据所述运动学参数理论值和所述关节角度计算末端位姿理论值;
9、s03、基于所述末端位姿理论值,通过所述运动学标定方程计算运动学参数误差,并更新运动学参数后重复步骤s01-s03,直至达到预设迭代次数,完成标定仿真。
10、可选地,所述正向运动学模型,具体为:
11、
12、其中,
13、
14、
15、式中,w为关节轴线在基坐标系s的单位方向向量,p为关节轴线上任意一点在基坐标系中的位置,是w的反对称矩阵,r∈so(3)是一个特殊的正交矩阵,并且b∈r3,t为工具坐标系,gst(0)为初始变换矩阵。
16、可选地,所述线性误差模型,具体为:
17、
18、式中,f为所述正向运动学模型。
19、本申请第二方面提供一种机器人的标定系统,所述系统包括:
20、第一建立单元,用于采用指数积公式描述待标定机器人的正向运动学,从而建立待标定机器人的正向运动学模型;
21、第二建立单元,用于选取基坐标系作为参考坐标系,在基坐标系中描述待标定机器人的末端位姿误差,从而建立所述正向运动学模型的线性误差模型;
22、最小化单元,用于对所述线性误差模型的参数进行最小化处理,得到理想线性误差模型,从而整理得到运动学标定方程。
23、可选地,还包括,仿真单元;所述仿真单元,具体包括:
24、获取单元,用于根据待标定机器人的标准尺规图,建立待标定机器人的旋量模型,在基于视觉测量的标定系统下随机生成若干个末端位姿测量值,根据所述旋量模型生成待标定机器人的运动学参数理论值,并预设实际值;
25、第一计算单元、根据待标定机器人的运动学参数实际值和所述末端位姿测量值,计算关节角度,根据所述运动学参数理论值和所述关节角度计算末端位姿理论值;
26、第二计算单元,用于基于所述末端位姿理论值,通过所述运动学标定方程计算运动学参数误差,并更新运动学参数后触发所述获取单元,直至达到预设迭代次数,完成标定仿真。
27、可选地,所述正向运动学模型,具体为:
28、
29、其中,
30、
31、
32、式中,w为关节轴线在基坐标系s的单位方向向量,p为关节轴线上任意一点在基坐标系中的位置,是w的反对称矩阵,r∈so(3)是一个特殊的正交矩阵,并且b∈r3,t为工具坐标系,gst(0)为初始变换矩阵。
33、可选地,所述线性误差模型,具体为:
34、
35、式中,f为所述正向运动学模型。
36、本申请第三方面提供一种机器人的标定设备,所述设备包括处理器以及存储器:
37、所述存储器用于存储程序代码,并将所述程序代码传输给所述处理器;
38、所述处理器用于根据所述程序代码中的指令,执行如上述第一方面所述的机器人的标定方法的步骤。
39、本申请第四方面提供一种计算机可读存储介质,所述计算机可读存储介质用于存储程序代码,所述程序代码用于执行上述第一方面所述的机器人的标定方法。
40、从以上技术方案可以看出,本申请具有以下优点:
41、本申请提供了一种机器人的标定方法,包括:采用指数积公式描述待标定机器人的正向运动学,从而建立待标定机器人的正向运动学模型;选取基坐标系作为参考坐标系,在基坐标系中描述待标定机器人的末端位姿误差,从而建立正向运动学模型的线性误差模型;对线性误差模型的参数进行最小化处理,得到理想线性误差模型,从而整理得到运动学标定方程。
42、与现有技术相比,本申请的机器人的标定方法,针对当前机器人运动学标定模型中存在的奇异性、参数冗余现象,采用指数积(poe)公式描述机器人正向运动学,从而获得正向运动学方程,进而对其取微分建立线性误差模型,并通过最小化处理消除冗余参数,最终获得运动学标定方程。能够有效提高机器人的绝对定位精度,且实现了机器人的在线自动标定,提升了标定方法的自动化程度。进一步地,通过poe公式的最小模型与二维码定位的机器人运动学标定方法。采用最小二乘法对标定方程进行参数辨识,有效避免了传统模型迭代过程中归一化、正交化的操作,分别进行基于位姿测量与基于位置测量的运动学标定仿真。从而解决了现有技术标定自动化程度低且定位精度较低的问题。
技术特征:
1.一种机器人的标定方法,其特征在于,包括:
2.根据权利要求1所述的机器人的标定方法,其特征在于,所述对所述线性误差模型的参数进行最小化处理,得到理想线性误差模型,从而整理得到运动学标定方程,之后还包括:
3.根据权利要求1所述的机器人的标定方法,其特征在于,所述正向运动学模型,具体为:
4.根据权利要求3所述的机器人的标定方法,其特征在于,所述线性误差模型,具体为:
5.一种机器人的标定系统,其特征在于,包括:
6.根据权利要求5所述的机器人的标定系统,其特征在于,还包括,仿真单元;所述仿真单元,具体包括:
7.根据权利要求5所述的机器人的标定系统,其特征在于,所述正向运动学模型,具体为:
8.根据权利要求7所述的机器人的标定系统,其特征在于,所述线性误差模型,具体为:
9.一种机器人的标定设备,其特征在于,所述设备包括处理器以及存储器:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质用于存储程序代码,所述程序代码用于执行权利要求1-4任一项所述的机器人的标定方法。
技术总结
本申请公开了一种机器人的标定方法及相关装置,针对当前机器人运动学标定模型中存在的奇异性、参数冗余现象,采用指数积(POE)公式描述机器人正向运动学,从而获得正向运动学方程,进而对其取微分建立线性误差模型,并通过最小化处理消除冗余参数,最终获得运动学标定方程。能够有效提高机器人的绝对定位精度,且实现了机器人的在线自动标定,提升了标定方法的自动化程度。进一步地,通过POE公式的最小模型与二维码定位的机器人运动学标定方法,采用最小二乘法对标定方程进行参数辨识,有效避免了传统模型迭代过程中归一化、正交化的操作。从而解决了现有技术标定自动化程度低且定位精度较低的问题。
技术研发人员:廖伟文,汤永联,苏波,宋丽敏,谢志梅,侯昌明,刘乃桓,王建锋,李毅东
受保护的技术使用者:广东电网有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!