一种平行伺服电动夹爪的制作方法
本技术涉及一种电动夹爪,具体涉及一种平行伺服电动夹爪。
背景技术:
1、夹爪根据其类型可划分为电动夹爪和气动夹爪,其中,电动夹爪是通过电力驱动来控制夹爪的夹紧和释放。
2、现有专利技术中202122261576.1涉及一种伺服电动夹爪,其包括架体、伺服电机、丝杠、插板、导轨、两个滚轮及两个夹爪,伺服电机固定安装在架体上,丝杠安装在架体上且与伺服电机的电机轴平行设置,电机轴与丝杠上部分别安装有相互啮合的齿轮,丝杠上套装有螺母套,插板固定安装在螺母套下部,插板底部设有下插角且在下插角处设有齿牙,导轨固装在架体下部,两个滚轮上设有与插板相配合的轮齿且滚轮的轮轴分别与相应的滑块固接,两个滑块分别滑动的安装于导轨上,两个夹爪分别与相应的滑块固接。本实用新型提供的装置结构简单,运行稳定可靠,方便控制夹持精度及夹持力度且能够自动复位。
3、现有技术虽结构简单,运行稳定可靠,方便控制夹持精度及夹持力度且能够自动复位,但其夹爪的可移动距离较为有限,导致其夹爪之间存在一定的间隙,因此,所能夹取的物品较为有限。
技术实现思路
1、本实用新型的目的在于针对现有技术中不足与缺陷,提供一种平行伺服电动夹爪,本电动夹爪采用两组错开的夹爪座,并通过在夹爪座上安装上夹爪,利用夹爪座的可移动便捷性,进而保证其夹爪之间的间隙,增加其夹爪的可夹取能力。
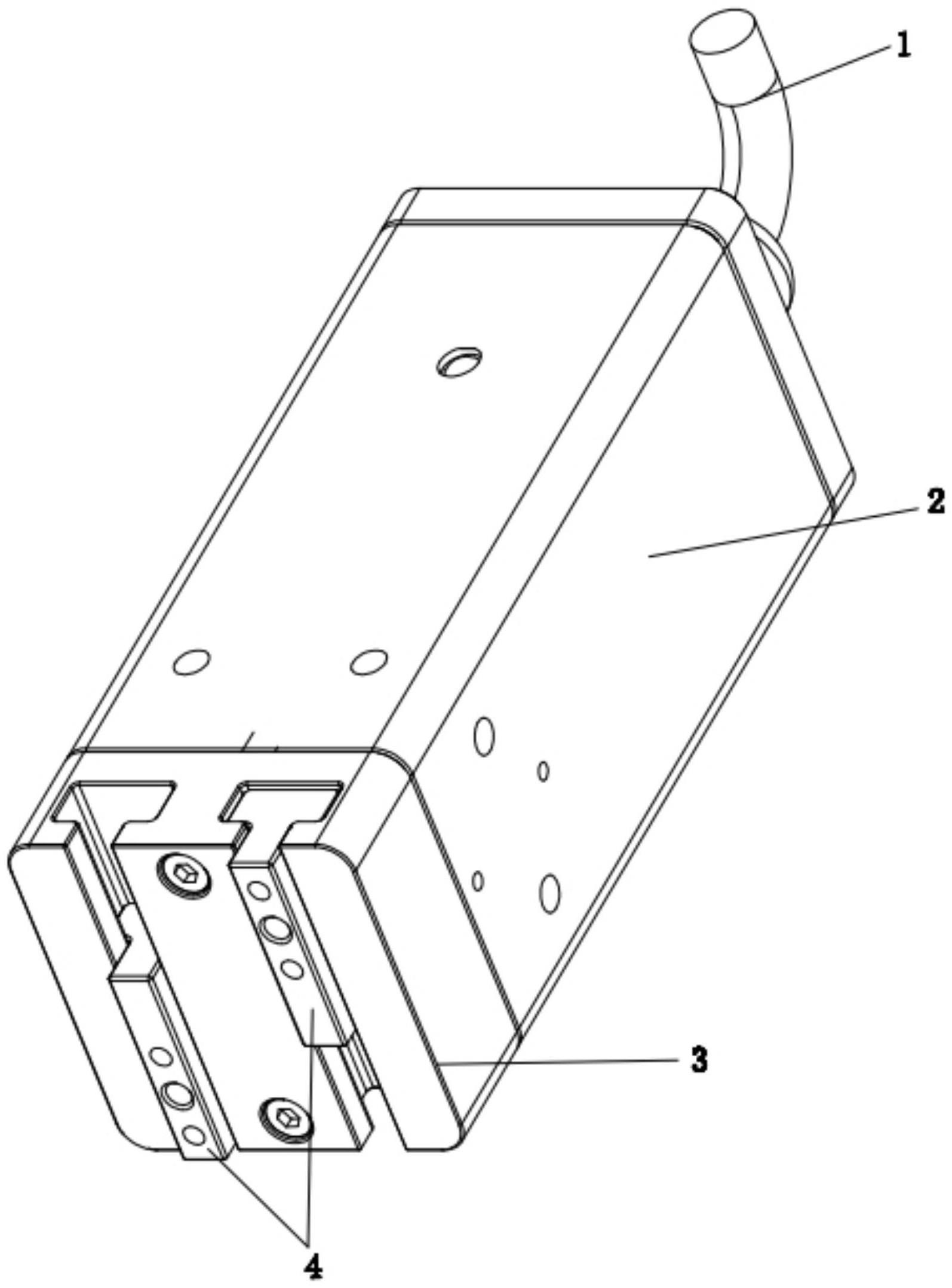
2、为实现上述目的,本实用新型采用以下技术方案是:一种平行伺服电动夹爪,它包括伺服电机2、移动轨道座3、夹爪座4,所述伺服电机2一端设有电源连接导线1,伺服电机2的另一端安装有移动轨道座3,且移动轨道座3外端的左右两侧均分别安装有夹爪座4。
3、进一步的,所述伺服电机2与移动轨道座3通过固定螺栓5相互连接。
4、进一步的,所述移动轨道座3上设有便于夹爪座4活动的轨道槽301,且移动轨道座3的中部设有便于安装固定螺栓5的螺栓通孔302。
5、进一步的,所述夹爪座4上设有夹爪安装孔401。
6、进一步的,所述夹爪座4与轨道槽301的剖面均为t型。
7、进一步的,所述夹爪座4设有两个,且错开分别安装在移动轨道座3的两端。
8、采用上述技术方案后,本实用新型有益效果为:本电动夹爪采用两组错开的夹爪座,并通过在夹爪座上安装上夹爪,利用夹爪座的可移动便捷性,进而保证其夹爪之间的间隙,增加其夹爪的可夹取能力。
技术特征:
1.一种平行伺服电动夹爪,其特征在于:它包括伺服电机(2)、移动轨道座(3)、夹爪座(4),所述伺服电机(2)一端设有电源连接导线(1),伺服电机(2)的另一端安装有移动轨道座(3),且移动轨道座(3)外端的左右两侧均分别安装有夹爪座(4)。
2.根据权利要求1所述的一种平行伺服电动夹爪,其特征在于:所述伺服电机(2)与移动轨道座(3)通过固定螺栓(5)相互连接。
3.根据权利要求1所述的一种平行伺服电动夹爪,其特征在于:所述移动轨道座(3)上设有便于夹爪座(4)活动的轨道槽(301),且移动轨道座(3)的中部设有便于安装固定螺栓(5)的螺栓通孔(302)。
4.根据权利要求1所述的一种平行伺服电动夹爪,其特征在于:所述夹爪座(4)上设有夹爪安装孔(401)。
5.根据权利要求1所述的一种平行伺服电动夹爪,其特征在于:所述夹爪座(4)与轨道槽(301)的剖面均为t型。
6.根据权利要求1所述的一种平行伺服电动夹爪,其特征在于:所述夹爪座(4)设有两个,且错开分别安装在移动轨道座(3)的两端。
技术总结
一种平行伺服电动夹爪。它包括伺服电机、移动轨道座、夹爪座,伺服电机一端设有电源连接导线,伺服电机的另一端安装有移动轨道座,且移动轨道座外端的左右两侧均分别安装有夹爪座。本技术有益效果为:本电动夹爪采用两组错开的夹爪座,并通过在夹爪座上安装上夹爪,利用夹爪座的可移动便捷性,进而保证其夹爪之间的间隙,增加其夹爪的可夹取能力。
技术研发人员:许帅
受保护的技术使用者:深圳市鸿汇科技有限公司
技术研发日:20230522
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!