机器人的控制方法、非易失性可读存储介质及机器人与流程
本发明涉及清洁设备,具体涉及一种机器人的控制方法、非易失性可读存储介质及机器人。
背景技术:
1、在日常家庭环境中,很多家具的摆放位置是基本固定的。由于长期固定,许多家庭垃圾容易藏在家具内或者堆积在家具与地面接触的边缘或者支角,经过日积月累的侵蚀,当家具被挪动时,家具与地面接触的边缘或支角容易烙印较深的痕迹在地面上,并且沙土等小垃圾容易残留在该痕迹上。由于现有机器人并不会记录与家具关联的清洁信息,当机器人仍以普通清洁模式清洁地面时,机器人是不容易将痕迹对应的区域清洁干净的,清洁效果不好。
技术实现思路
1、本发明实施例的一个目的旨在提供一种机器人的控制方法、非易失性可读存储介质及机器人,旨在解决相关技术存在的清洁效果不好的技术问题。
2、在第一方面,本发明实施例提供一种机器人的控制方法,包括:
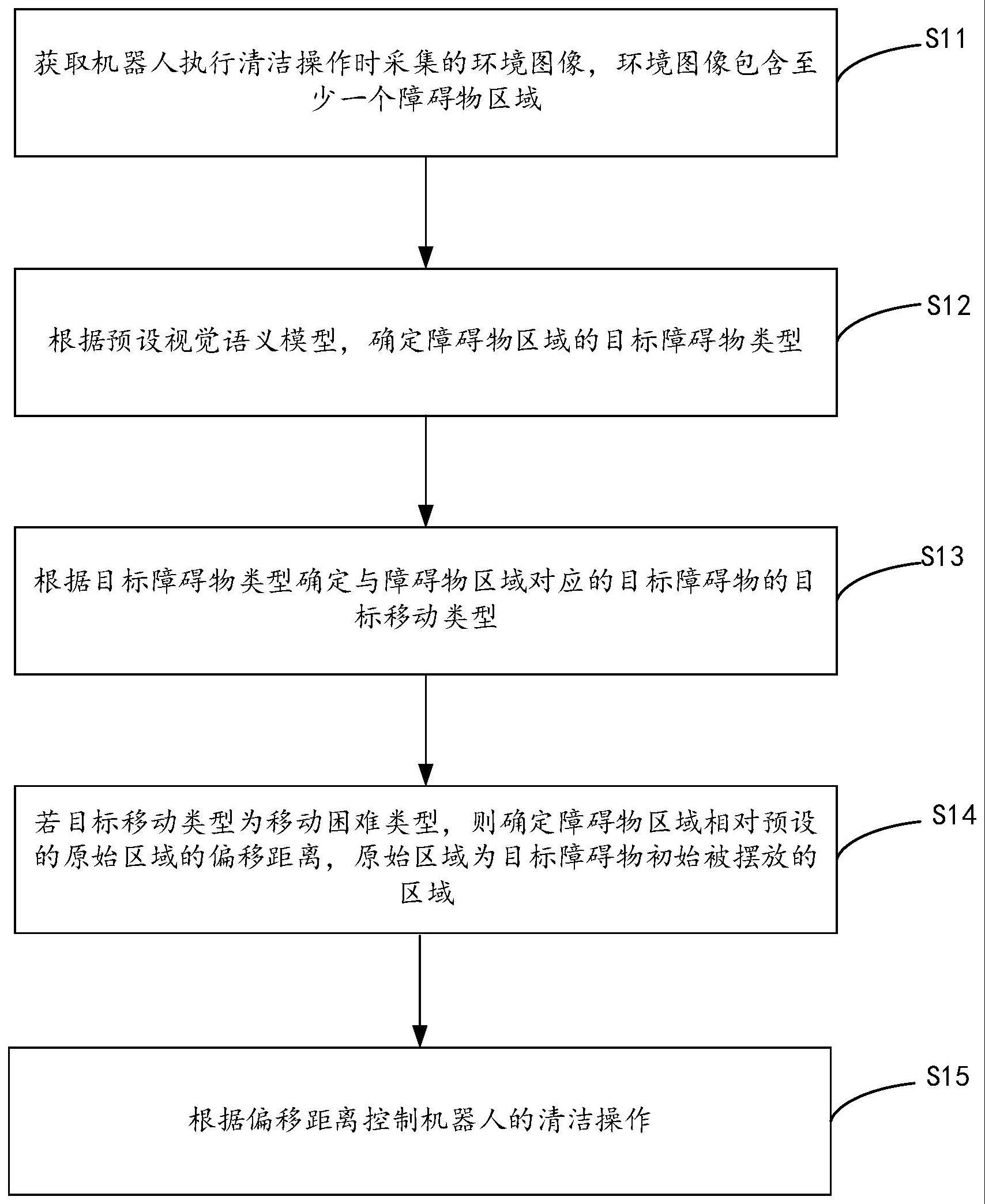
3、获取机器人执行清洁操作时采集的环境图像,所述环境图像包含至少一个障碍物区域;
4、根据预设视觉语义模型,确定所述障碍物区域的目标障碍物类型;
5、根据所述目标障碍物类型确定与所述障碍物区域对应的目标障碍物的目标移动类型;
6、若所述目标移动类型为移动困难类型,则确定所述障碍物区域相对预设的原始区域的偏移距离,所述原始区域为所述目标障碍物初始被摆放的区域;
7、根据所述偏移距离控制所述机器人的清洁操作。
8、可选地,所述根据所述偏移距离控制所述机器人的清洁操作包括:
9、判断所述偏移距离是否大于预设距离阈值;
10、若大于,则根据所述目标障碍物类型确定目标清洁强度,根据所述目标清洁强度控制所述机器人对所述原始区域进行清洁,其中,所述目标清洁强度大于所述机器人在常规清洁模式下选择的清洁强度;
11、若小于,则控制所述机器人对所述目标障碍物进行沿边清洁。
12、可选地,重量等级与清洁强度呈正相关关系,根据所述目标障碍物类型确定目标清洁强度包括:
13、根据所述目标障碍物类型确定所述目标障碍物对应的重量等级为目标重量等级;
14、确定所述目标重量等级对应的清洁强度为目标清洁强度。
15、可选地,所述根据所述目标清洁强度控制所述机器人对所述原始区域进行清洁包括:
16、根据所述目标障碍物类型确定目标结构类型;
17、根据所述目标结构类型在所述原始区域上确定所述目标障碍物与地面接触的目标区域;
18、根据所述目标清洁强度控制所述机器人对所述目标区域进行清洁。
19、可选地,当所述目标结构类型为框架支撑类型时,所述根据所述目标结构类型在所述原始区域上确定所述目标障碍物与地面接触的目标区域包括:
20、根据所述框架支撑类型,在所述原始区域上确定边缘区域作为目标区域。
21、可选地,所述根据所述目标清洁强度控制所述机器人对所述目标区域进行清洁包括:
22、在所述目标区域上确定与所述机器人的当前位置最近且可通行的位置点为起始位置点;
23、根据所述目标清洁强度控制所述机器人自所述起始位置点开始沿着所述目标区域进行清洁。
24、可选地,当所述目标结构类型为支点支撑类型时,所述根据所述目标结构类型在所述原始区域上确定所述目标障碍物与地面接触的目标区域包括:
25、根据所述支点支撑类型,在所述原始区域上确定角落区域为目标区域。
26、可选地,所述根据所述目标清洁强度控制所述机器人对所述目标区域进行清洁包括:
27、确定所述角落区域的中心点及绕所述中心点进行旋转的旋转半径;
28、根据所述目标清洁强度控制所述机器人按照所述旋转半径以所述中心点为旋转中心进行旋转清洁。
29、在第二方面,本发明实施例提供一种非易失性可读存储介质,所述非易失性可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使机器人执行任一项所述的机器人的控制方法。
30、在第三方面,本发明实施例提供一种计算机程序产品,所述计算机程序产品包括存储在非易失性计算机可读存储介质上的计算机程序,所述计算机程序包括程序指令,当所述程序指令被机器人执行时,使机器人执行上述机器人的控制方法。
31、在第四方面,本发明实施例提供一种机器人,包括:
32、至少一个处理器;以及,
33、与所述至少一个处理器通信连接的存储器;其中,
34、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行所述的机器人的控制方法。
35、在本发明实施例提供的机器人的控制方法中,获取机器人执行清洁操作时采集的环境图像,环境图像包含至少一个障碍物区域,根据预设视觉语义模型,确定障碍物区域的目标障碍物类型,根据目标障碍物类型确定与障碍物区域对应的目标障碍物的目标移动类型,若目标移动类型为移动困难类型,则确定障碍物区域相对预设的原始区域的偏移距离,原始区域为目标障碍物初始被摆放的区域,根据偏移距离控制机器人的清洁操作。本实施例能够关注移动困难类型的目标障碍物是否被移动,其中,偏移距离用于表征目标障碍物是否被移动,本实施例能够根据偏移距离控制机器人的清洁操作,如此能够自适应地选择相应的清洁操作,从而能够提高清洁效果。
技术特征:
1.一种机器人的控制方法,其特征在于,包括:
2.根据权利要求1所述的控制方法,其特征在于,所述根据所述偏移距离控制所述机器人的清洁操作包括:
3.根据权利要求2所述的控制方法,其特征在于,重量等级与清洁强度呈正相关关系,根据所述目标障碍物类型确定目标清洁强度包括:
4.根据权利要求2所述的控制方法,其特征在于,所述根据所述目标清洁强度控制所述机器人对所述原始区域进行清洁包括:
5.根据权利要求4所述的控制方法,其特征在于,当所述目标结构类型为框架支撑类型时,所述根据所述目标结构类型在所述原始区域上确定所述目标障碍物与地面接触的目标区域包括:
6.根据权利要求5所述的控制方法,其特征在于,所述根据所述目标清洁强度控制所述机器人对所述目标区域进行清洁包括:
7.根据权利要求4所述的控制方法,其特征在于,当所述目标结构类型为支点支撑类型时,所述根据所述目标结构类型在所述原始区域上确定所述目标障碍物与地面接触的目标区域包括:
8.根据权利要求7所述的控制方法,其特征在于,所述根据所述目标清洁强度控制所述机器人对所述目标区域进行清洁包括:
9.一种非易失性可读存储介质,其特征在于,存储有计算机可执行指令,所述计算机可执行指令用于使机器人执行如权利要求1至8任一项所述的机器人的控制方法。
10.一种机器人,其特征在于,包括:
技术总结
本发明涉及清洁设备技术领域,公开了一种机器人的控制方法、非易失性可读存储介质及机器人。机器人的控制方法包括:获取机器人执行清洁操作时采集的环境图像,环境图像包含至少一个障碍物区域,根据预设视觉语义模型,确定障碍物区域的目标障碍物类型,根据目标障碍物类型确定目标障碍物的目标移动类型,若目标移动类型为移动困难类型,则确定障碍物区域相对预设的原始区域的偏移距离,根据偏移距离控制机器人的清洁操作。本实施例能够关注移动困难类型的目标障碍物是否被移动,其中,偏移距离用于表征目标障碍物是否被移动,本实施例能够根据偏移距离控制机器人的清洁操作,如此能够自适应地选择相应的清洁操作,从而能够提高清洁效果。
技术研发人员:谭国炎,叶力荣
受保护的技术使用者:深圳银星智能集团股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!