智能检测辅助机器人的制作方法
本发明涉及智能检测,具体涉及一种智能检测辅助机器人。
背景技术:
1、动力电池包充放电测试项目多、周期长,且试验过程中可能发生电池包鼓包、冒烟甚至起火等异常情况,存在安全风险,需要24小时值守和周期性巡检,目前通过智能机器人进行巡检的模式已经逐步取代人工巡检,极大幅度的降低了工作人员的劳动强度。
2、现有的智能检测辅助机器人基于agv移动底盘和柔性机械臂的复合形态,可实现实验室24小时周期性智能巡检和动力电池自动搬运,能够摆脱对电池包搬运叉车特种作业人员的依赖,还可以通过数字化实验室云控平台实现对巡检机器人进行远程监控,能够与安全监管系统等云控平台子系统交互。
3、然而,在使用传统的智能检测辅助机器人进行巡检和搬运的过程中发现,传统的智能检测机器人只能通过机械臂对单件的电池包进行搬运,不方便对多件电池包批量转运至指定区域,从而导致在转运多件电池包时需要反复的在转运两点之间行进,降低了搬运电池包的工作效率。
技术实现思路
1、针对现有技术存在的不足,本发明提出一种智能检测辅助机器人,以解决上述背景技术中提出的传统的智能检测机器人只能对单件的电池包进行搬运,不方便对多件电池包批量转运至指定区域的技术问题。
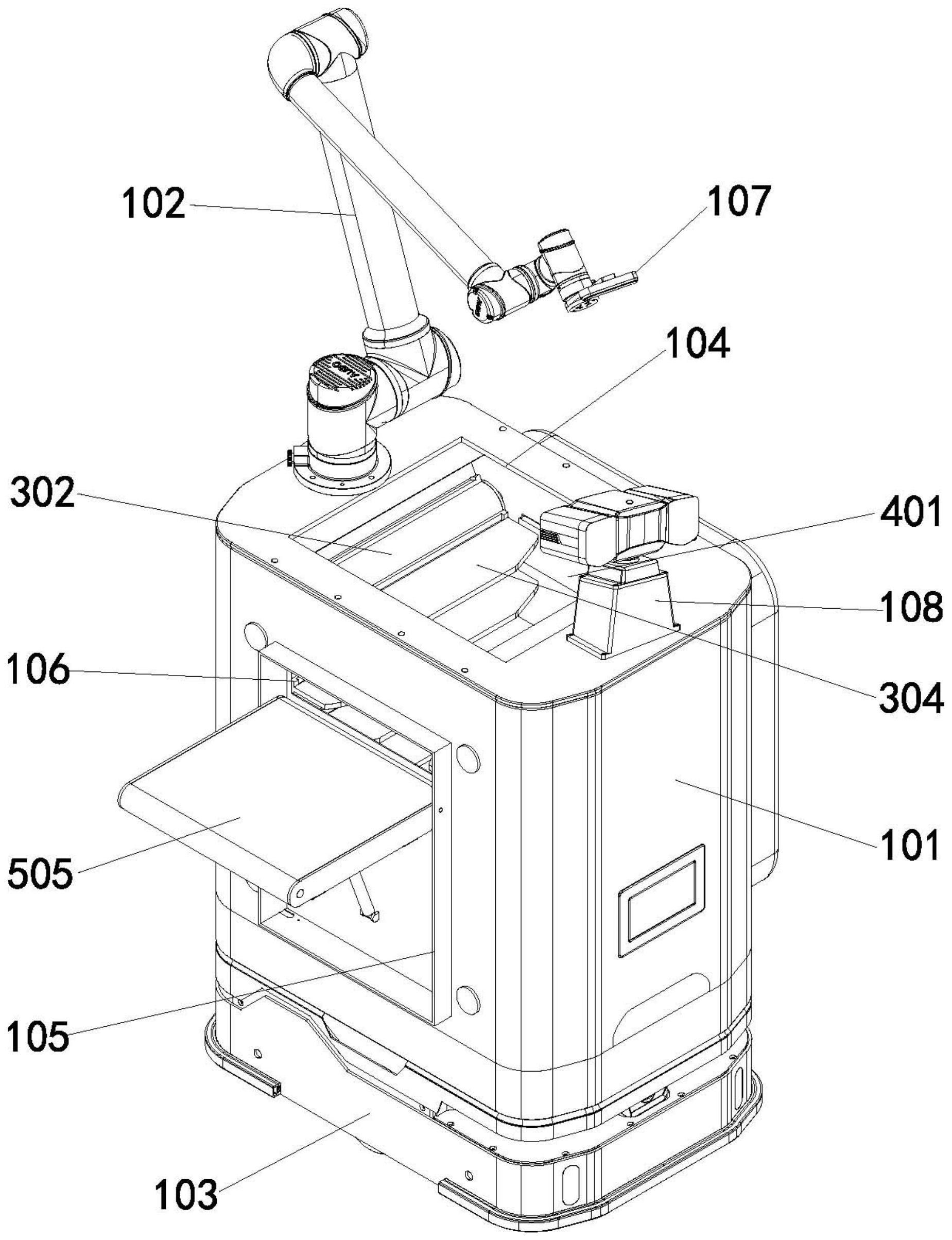
2、为实现上述目的,本发明提供如下技术方案,一种智能检测辅助机器人,包括有:
3、箱体,所述箱体上设置有柔性机械臂,所述箱体底部设置有移动底盘,所述箱体上开设有进件口和出件口;
4、皮带输送机构,设置有两组,且相对布置于所述箱体内,所述皮带输送机构中的承托皮带上间隔布置有多组承托板,所述承托板受重时向下运动单位距离;
5、复位组件,设置在所述箱体上且与所述皮带输送机构连接,以在最上方承托板上重物减少时驱动承托皮带复位单位距离;
6、同步机构,与两组所述皮带输送机构连接,以控制两组所述皮带输送机构同步运动;及
7、推进机构,设置在所述箱体上,以将最上方的一组承托板上的物体推出至所述出件口外。
8、进一步的,所述皮带输送机构包括有两组间隔平行布置的传动辊,所述传动辊沿其轴线可转动的设置在所述箱体内,所述承托皮带套设在两组所述传动辊上,所述复位组件和所述同步机构均与每组皮带输送机构中的其中一组所述传动辊连接。
9、进一步的,所述复位组件包括有恒力弹簧,所述箱体上设置有固定座,所述恒力弹簧的一端与其中一组所述传动辊固定连接,另一端与所述固定座固定连接。
10、进一步的,所述同步机构包括有:
11、第一同步轮,设置有两组,且分别设置在两组皮带输送机构的其中一组所述传动辊的一端;
12、第二同步轮,设置有两组,且沿其轴线可转动的设置在所述箱体上,每组所述第二同步轮均与其中一组所述第一同步轮通过同步带进行连接;及
13、传动齿轮,设置有两组,且分别与两组所述第二同步轮同轴连接,两组所述传动齿轮相啮合。
14、进一步的,所述推进机构包括有:
15、连接壳,设置在所述箱体上且与之连通;
16、推板,设置在所述连接壳一侧开口处,且置于其中层叠布置的两组所述承托板之间;
17、推动组件,设置在所述连接壳内,且与所述推板连接,以推动所述推板运动。
18、进一步的,所述推动组件包括有:
19、剪叉架,设置在所述连接壳内,所述剪叉架的四端均铰接有活动座,其中两组所述活动座上设置有螺纹座;
20、第一横杆,设置在所述连接壳内,且其轴线与所述推板平行;
21、第二横杆,设置在所述推板上,其轴线与所述第一横杆轴线平行,其中两组所述活动座滑动套设在所述第一横杆上,另外两组所述第一横杆滑动套设在所述第二横杆上;
22、双向丝杆,沿其轴线可转动的设置在所述连接壳内,所述连接壳上设置有驱动电机,所述驱动电机的输出轴与所述双向丝杆端部连接,两组所述螺纹座分别套设在所述双向丝杆的两端并与之螺接。
23、进一步的,所述承托板通过固定架与所述承托皮带连接,所述推板在推进的过程中通过两组所述固定架进行定位。
24、进一步的,所述箱体的一侧设置有安装框,所述安装框内设置有用于输送从所述出件口推出物体的输送组件。
25、进一步的,所述输送组件包括有:
26、安装架,设置在所述安装框内;
27、输送辊,间隔平行的设置有两组,且分别沿其轴线可转动的设置在所述安装架上;
28、驱动马达,设置在所述安装架上以驱动其中一组所述输送辊转动;及
29、输送带,套设在两组所述输送辊上。
30、进一步的,所述安装架上设置有连接柱,所述安装架通过所述连接柱与所述安装框可转动连接,所述安装框内设置有电动伸缩杆,所述电动伸缩杆的两端分别与所述安装架和所述安装框铰接。
31、与现有技术相比,本发明具备以下有益效果:
32、1.该机器人在进行巡检的过程中,可通过柔性机械臂将电池包拾取后通过进件口放入箱体内,电池包进入箱体后放置在两组处于同一平面的承托板上,并通过电池包的重量带动承托皮带运动,使得受重的承托板向下运动,从而可将多组电池包依次放入箱体内,并通过移动底盘对多组电池包进行批量转运。将多组电池包转运至指定区域后,可通过推进组件将最上方的一组电池包通过出件口退出至指定位置,且最上方承托板上的重量减少时,在复位机构的作用下驱动承托皮带复位,从而使得下方的电池包移动至上方并与出件口对齐,便于依次将多组电池包推进至指定位置,进而方便在巡检的过程中对多组电池包进行转运,提高了工作效率。
33、2.且在通过推进机构将电池包推出至出件口时,可通过电动伸缩杆带动安装架沿连接柱的轴线转动,从而对输送带的角度进行调节,以对输送带的输出端的高度进行控制,并通过驱动马达带动其中一组输送辊转动,以在两组输送辊的作用下控制输送带运动,将推出的一组电池包输送至指定高度,无需人为对转运后的电池包进行搬运,进一步的提高了该机器人的功能性和实用价值。
技术特征:
1.智能检测辅助机器人,其特征在于,包括有:
2.根据权利要求1所述的智能检测辅助机器人,其特征在于:所述皮带输送机构包括有两组间隔平行布置的传动辊(301),所述传动辊(301)沿其轴线可转动的设置在所述箱体(101)内,所述承托皮带(302)套设在两组所述传动辊(301)上,所述复位组件和所述同步机构均与每组皮带输送机构中的其中一组所述传动辊(301)连接。
3.根据权利要求2所述的智能检测辅助机器人,其特征在于:所述复位组件包括有恒力弹簧(309),所述箱体(101)上设置有固定座(203),所述恒力弹簧(309)的一端与其中一组所述传动辊(301)固定连接,另一端与所述固定座(203)固定连接。
4.根据权利要求2所述的智能检测辅助机器人,其特征在于,所述同步机构包括有:
5.根据权利要求1所述的智能检测辅助机器人,其特征在于,所述推进机构包括有:
6.根据权利要求5所述的智能检测辅助机器人,其特征在于,所述推动组件包括有:
7.根据权利要求5所述的智能检测辅助机器人,其特征在于:所述承托板(304)通过固定架(303)与所述承托皮带(302)连接,所述推板(401)在推进的过程中通过两组所述固定架(303)进行定位。
8.根据权利要求1所述的智能检测辅助机器人,其特征在于,所述箱体(101)的一侧设置有安装框(105),所述安装框(105)内设置有用于输送从所述出件口(106)推出物体的输送组件。
9.根据权利要求8所述的智能检测辅助机器人,其特征在于,所述输送组件包括有:
10.根据权利要求9所述的智能检测辅助机器人,其特征在于:所述安装架(501)上设置有连接柱(502),所述安装架(501)通过所述连接柱(502)与所述安装框(105)可转动连接,所述安装框(105)内设置有电动伸缩杆(506),所述电动伸缩杆(506)的两端分别与所述安装架(501)和所述安装框(105)铰接。
技术总结
本发明提供了一种智能检测辅助机器人,包括有箱体,箱体上设置有柔性机械臂,箱体底部设置有移动底盘,箱体上开设有进件口和出件口,箱体内相对设置有两组皮带输送机构,皮带输送机构中的承托皮带上间隔布置有多组承托板。箱体上设置有与皮带输送机构连接的复位组件,以在最上方承托板上重物减少时驱动承托皮带复位。两组皮带输送机构通过同步机构连接,以控制两组皮带输送机构同步运动。箱体上还设置有推进机构,以将最上方的一组承托板上的物体推出至出件口外。该机器人可将多组电池包依次放入箱体内,并通过移动底盘对多组电池包进行批量转运,转运至指定位置后还可将电池包依次推出至指定位置,提高了电池包转运的工作效率。
技术研发人员:谢东坡,吴超,颜文森,田相军,沈林邦,张红,黄毅,胡斌,许响林,徐建勋,刘波,古佳斌,夏小均,顾灿松,叶磊
受保护的技术使用者:招商局检测车辆技术研究院有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!