一种具有监视功能的人工智能机器人
本发明涉及监控机器人,特别的,是一种具有监视功能的人工智能机器人。
背景技术:
1、智能机器人之所以叫智能机器人,这是因为它有相当发达的“大脑”,在脑中起作用的是中央处理器,这种计算机跟操作它的人有直接的联系,最主要的是,这样的计算机可以进行按目的安排的动作,在工厂的安全系统中,需要设立可以移动的监控器对厂区进行监控,由于监控器和存储器是属于精度比较高的仪器,在其移动监视过程中,将会根据现场实际情况调整监视角度的同时,使其在固定筒的指定高度发生相对的卡顿性摆动,会对监控器产生对应牵扯力和震感,且与其调整好的监视角度造成不可逆的偏斜错位,进而改变对存储器的数据传输的准确性,降低该机器人对现场的智能监视功能。
技术实现思路
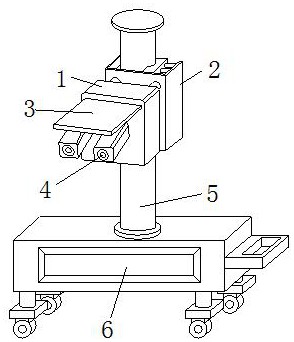
1、针对上述问题,本发明提供一种具有监视功能的人工智能机器人,其结构包括太阳能板、存储器、调位机架、移动底座、监控器、固定筒,所述太阳能板和监控器通过存储器采用电性连接的方式相配合,所述存储器安装在调位机架上方,所述调位机架活动卡合于固定筒外部,所述固定筒与移动底座连接;
2、所述调位机架包括护框、贴合组件、夹持块、固定板、伸缩杆、轮轴,所述护框内部连接有固定板,所述固定板上方通过伸缩杆连接有夹持块,所述夹持块通过贴合组件和轮轴在固定筒外部活动卡合,所述轮轴与监控器之间采用电性连接的方式相配合。
3、作为本发明的进一步改进,所述贴合组件包括围带、支架、定格装置、扶手、中立杆、开合把,所述围带连接于中立杆两侧,且内部安装有扶手,所述中立杆上方连接有开合把,且连接在支架上方,所述开合把内安装有定格装置。
4、作为本发明的进一步改进,所述支架与夹持块连接,且与开合把间隙配合在固定筒外部,可以承接开合把,和作为支持定格装置抵触在固定筒外的必要条件。
5、作为本发明的进一步改进,所述扶手包括按压块、牵引件、活动框、穿孔、斜板,所述按压块滑动配合于活动框上方,且与穿孔之间安装有牵引件,所述活动框连接于斜板上方,所述斜板一侧连接于围带内部,且另一侧连接在开合把外部。
6、作为本发明的进一步改进,所述牵引件包括磨合网、团球、弧板、滚轮、对接圈,所述磨合网和滚轮连接于弧板之间,且磨合网滑动配合在按压块下方,所述弧板一端通过滚轮连接在活动框上方,且另一端通过对接圈连接有团球。
7、作为本发明的进一步改进,所述团球与穿孔连接,且转动配合于斜板上,有助于通过调整弧板自身弧度而撬动斜板。
8、作为本发明的进一步改进,所述定格装置包括隔板、支持件、套框、抵触球,所述隔板通过套框连接在开合把内,且安装有支持件,所述支持件通过抵触球过渡配合在中立杆和固定筒外部。
9、作为本发明的进一步改进,所述支持件包括胶垫、摆杆、对夹、限位夹,所述胶垫与对夹连接,所述对夹通过摆杆活动卡合于固定筒外部,所述摆杆连接在限位夹内部,所述限位夹与隔板连接。
10、有益效果
11、与现有技术相比,本发明的有益效果:
12、本发明在底座移动的同时,可以驱动存储器和监控器会借助轮轴和夹持块上下移动在固定筒上,助力监控器实时的根据现场实际情况而定位,并准确的调整其监视角度,有利于监控器精准且智能化的朝存储器反馈现场实况。
13、在夹持块内设有贴合组件,利用贴合组件与固定筒相配合,当监控器在护框上倾向的摆动时,将会先通过存储器对护框有同向的牵引力,能让伸缩杆带动夹持块推动贴合组件,使其适应性弯折并环绕贴合在固定筒外,能卡止轮轴的滑动,和分解和消除监控器与存储器对调位机架的牵扯,有助于监控器在固定筒的指定高度上,而准确的转向监视现场和对存储器传输监视数据,可以精准且智能化的反馈现场实况,保证该机器人对现场的智能监视功能。
14、本发明在贴合组件上设有定格装置和扶手,利用定格装置和扶手在开合把上相配合,当夹持块偏斜靠近固定筒外时,将会借助围带一侧带动扶手以开合把为支点倾斜靠近固定筒,使得开合把受按压顺着支架的锥台斜面倾斜打开,能把内部的定格装置向外支持,也能推动围带中部卡止轮轴的滑动,相互借力定点抵触在固定筒外,反之,围带另一侧内的结构会收合承接固定筒,并与固定筒的同向多点磨合,有效的反向包拢在固定筒外。
15、本发明利用按压块滑动配合于活动框扇,并且通过牵引件的延伸导向,能够让斜板准确的偏摆挤压开合把一侧,有助于开合把倾斜贴合在支架上。
16、本发明通过支持件之间由隔板相连接,有利于通过隔板弹性复位带动抵触球往上顶,能进一步挟持住固定筒,并加大开合把与固定筒外部之间的摩擦力。
技术特征:
1.一种具有监视功能的人工智能机器人,其特征在于:其结构包括太阳能板(3)、存储器(1)、调位机架(2)、移动底座(6)、监控器(4)、固定筒(5),所述太阳能板(3)和监控器(4)通过存储器(1)采用电性连接的方式相配合,所述存储器(1)安装在调位机架(2)上方,所述调位机架(2)活动卡合于固定筒(5)外部,所述固定筒(5)与移动底座(6)焊接连接;
2.根据权利要求1所述的一种具有监视功能的人工智能机器人,其特征在于:所述贴合组件(2s)包括围带(2s3)、支架(2s1)、定格装置(2s4)、扶手(2s2)、中立杆(2s6)、开合把(2s5),所述围带(2s3)连接于中立杆(2s6)两侧,且内部安装有扶手(2s2),所述中立杆(2s6)上方连接有开合把(2s5),且连接在支架(2s1)上方,所述开合把(2s5)内安装有定格装置(2s4)。
3.根据权利要求2所述的一种具有监视功能的人工智能机器人,其特征在于:所述支架(2s1)与夹持块(2d)连接,且与开合把(2s5)间隙配合在固定筒(5)外部。
4.根据权利要求2所述的一种具有监视功能的人工智能机器人,其特征在于:所述扶手(2s2)包括按压块(s21)、牵引件(s22)、活动框(s23)、穿孔(s24)、斜板(s25),所述按压块(s21)滑动配合于活动框(s23)上方,且与穿孔(s24)之间安装有牵引件(s22),所述活动框(s23)连接于斜板(s25)上方,所述斜板(s25)一侧连接于围带(2s3)内部,且另一侧连接在开合把(2s5)外部。
5.根据权利要求4所述的一种具有监视功能的人工智能机器人,其特征在于:所述牵引件(s22)包括磨合网(2c1)、团球(2c5)、弧板(2c3)、滚轮(2c2)、对接圈(2c4),所述磨合网(2c1)和滚轮(2c2)连接于弧板(2c3)之间,且磨合网(2c1)滑动配合在按压块(s21)下方,所述弧板(2c3)一端通过滚轮(2c2)连接在活动框(s23)上方,且另一端通过对接圈(2c4)连接有团球(2c5)。
6.根据权利要求6所述的一种具有监视功能的人工智能机器人,其特征在于:所述团球(2c5)与穿孔(s24)连接,且转动配合于斜板(s25)上。
7.根据权利要求2所述的一种具有监视功能的人工智能机器人,其特征在于:所述定格装置(2s4)包括隔板(s42)、支持件(s41)、套框(s43)、抵触球(s44),所述隔板(s42)通过套框(s43)连接在开合把(2s5)内,且安装有支持件(s41),所述支持件(s41)通过抵触球(s44)过渡配合在中立杆(2s6)和固定筒(5)外部。
8.根据权利要求7所述的一种具有监视功能的人工智能机器人,其特征在于:所述支持件(s41)包括胶垫(1x4)、摆杆(1x1)、对夹(1x2)、限位夹(1x3),所述胶垫(1x4)与对夹(1x2)连接,所述对夹(1x2)通过摆杆(1x1)活动卡合于固定筒(5)外部,所述摆杆(1x1)连接在限位夹(1x3)内部,所述限位夹(1x3)与隔板(s42)连接。
技术总结
本发明公开了一种具有监视功能的人工智能机器人,其结构包括太阳能板、存储器、调位机架、移动底座、监控器、固定筒,太阳能板和监控器通过存储器采用电性连接的方式相配合,存储器安装在调位机架上方,调位机架活动卡合于固定筒外部,固定筒与移动底座连接;在底座移动的同时,可以驱动存储器和监控器会借助轮轴和夹持块上下移动在固定筒上,助力监控器实时的根据现场实际情况而定位,并准确的调整其监视角度,有利于监控器精准且智能化的朝存储器反馈现场实况。
技术研发人员:吴妮妮
受保护的技术使用者:湖北经济管理大学(长江职业学院)
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!