一种仿生机械手的制作方法
本技术涉及机械手领域,尤其涉及一种仿生机械手。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
2、当前的机械手很多应用于工业,目前有两爪、三爪和四爪机械手,也有通过气体驱动、液压驱动、电机驱动也有混合驱动的,当前也有在仿生机械手领域存在多项研究,但多是模仿机械手指的动作的灵巧性不能抓取,也存在灵巧的可以抓取的,但结构复杂,制作成本高,很难普及。
3、因此,有必要提供一种仿生机械手解决上述技术问题。
技术实现思路
1、本实用新型提供一种仿生机械手,解决了现在的模仿机械手指的动作的灵巧性不能抓取,也存在灵巧的可以抓取的,但结构复杂,制作成本高的问题。
2、为解决上述技术问题,本实用新型提供的一种仿生机械手,包括:
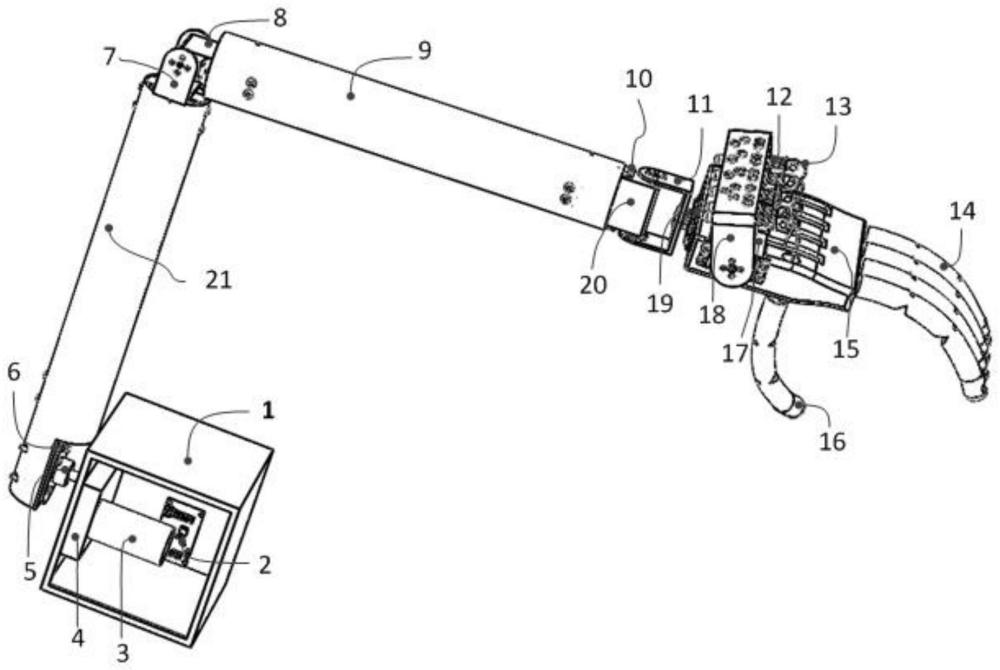
3、肩关节底座,所述肩关节底座的内部安装有总控制板,所述肩关节底座的内部且位于所述总控制板相对的一侧设置有肩关节舵机,所述肩关节底座内壁的一侧且位于所述肩关节舵机相对的一侧安装有肩关节舵机减速机,所述肩关节舵机减速机的一端安装有肩关节舵盘;
4、大臂,所述大臂设置于所述肩关节舵盘的一侧;
5、肘关节舵机摆动支架,所述肘关节舵机摆动支架设置于所述大臂的一侧,所述肘关节舵机摆动支架的一端连接有肘关节舵机,所述肘关节舵机的一侧连接有小臂,所述小臂的端部连接有腕关节摆动舵机前支架,所述腕关节摆动舵机前支架的一端安装有腕关节摆动舵机,所述腕关节摆动舵机的一侧安装有腕关节摆动舵机后支架,所述腕关节摆动舵机后支架的一端安装有腕关节旋转舵机,所述腕关节旋转舵机的一端安装有手掌,所述手掌的表面安装有多个固定圆柱,多个固定圆柱之间连接有牵引绳,所述手掌的一端连接有多个手指和指尖传感器,所述手掌的表面且位于多个所述固定圆柱的上方安装有动力支架。
6、优选的,所述大臂和所述肩关节舵盘之间设置有肩关节舵盘连接板,所述大臂和所述肘关节舵机摆动支架之间设置有肘关节舵机前固定支架。
7、优选的,多个所述固定圆柱之间设置有固定圆柱插销,所述动力支架的底部安装有多个手指驱动舵机舵盘。
8、优选的,所述手掌和所述动力支架之间设置有推拉电磁铁,所述动力支架的一侧固定安装有手指驱动舵机舵盘。
9、优选的,所述手掌和多个所述手指之间分别设置有手指驱动左舵机和手指驱动右舵机。
10、优选的,所述肘关节舵机摆动支架和所述肘关节舵机之间设置有肘关节舵盘,所述肘关节舵机的一侧设置有肘关节舵机后固定支架。
11、与相关技术相比较,本实用新型提供的一种仿生机械手具有如下有益效果:
12、本实用新型提供一种仿生机械手,此装置可以安装在轮椅上组成轮椅机械手,可以用于可穿戴机械手,通过与agv小车组合成移动机械手。
技术特征:
1.一种仿生机械手,其特征在于,包括:
2.根据权利要求1所述的仿生机械手,其特征在于,所述大臂和所述肩关节舵盘之间设置有肩关节舵盘连接板,所述大臂和所述肘关节舵机摆动支架之间设置有肘关节舵机前固定支架。
3.根据权利要求1所述的仿生机械手,其特征在于,多个所述固定圆柱之间设置有固定圆柱插销,所述动力支架的底部安装有多个手指驱动舵机舵盘。
4.根据权利要求1所述的仿生机械手,其特征在于,所述手掌和所述动力支架之间设置有推拉电磁铁,所述动力支架的一侧固定安装有手指驱动舵机舵盘。
5.根据权利要求1所述的仿生机械手,其特征在于,所述手掌和多个所述手指之间分别设置有手指驱动左舵机和手指驱动右舵机。
6.根据权利要求1所述的仿生机械手,其特征在于,所述肘关节舵机摆动支架和所述肘关节舵机之间设置有肘关节舵盘,所述肘关节舵机的一侧设置有肘关节舵机后固定支架。
技术总结
本技术提供一种仿生机械手,包括:肩关节底座,所述肩关节底座的内部安装有总控制板,所述肩关节底座的内部且位于所述总控制板相对的一侧设置有肩关节舵机,所述肩关节底座内壁的一侧且位于所述肩关节舵机相对的一侧安装有肩关节舵机减速机,所述肩关节舵机减速机的一端安装有肩关节舵盘。本技术提供的一种仿生机械手,此装置可以安装在轮椅上组成轮椅机械手,可以用于可穿戴机械手,通过与AGV小车组合成移动机械手。
技术研发人员:蔡兴来
受保护的技术使用者:蔡兴来
技术研发日:20230704
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!