一种抓握力度可调节的自动化机械手及其调节方法与流程
本发明涉及自动化机械手,具体为一种抓握力度可调节的自动化机械手及其调节方法。
背景技术:
1、自动化机械手通常是利用编程控制代码实现自动化控制,可以调节角度位置到合适角度处对物体进行抓取,并将抓取的物体移动到合适位置处放下,通常的机械手抓取面、装夹面比较平整或结构比较固定,同时间距和抓取力度也比较固定,在抓取不同结构的物体时需要利用不同的抓握力度,抓取一个重物需要更大的力度,而抓取一个易滑的物体可能需要更小的力度,而一种抓握力度可调节的自动化机械手及其调节方法能够为抓取物体提供便捷。
2、现有的自动化机械手存在的缺陷是:
3、1、专利文件:us20100207412a1,公开了机械手和机械手,上述公开的自动化机械手主要考虑如何将接触的方式设置在手附接基部上的问题,没有考虑到如何调节抓握力度的问题。
4、2、专利文件:us20080310945a1,公开了机械手及配备该机械手的机械手装置,上述公开的自动化机械手主要考虑如何紧凑地在机械手前端进行移动量大的处理的问题,没有考虑到如何校准压力传感器的问题。
5、3、专利文件:cn212918064u,公开了一种用于激光焊接的自动化机械手,上述公开的自动化机械手主要考虑如何解决无法进行左右移动的问题,没有考虑到如何更容易插入或夹持细小的物体的问题。
6、4、专利文件:cn210819597u,公开了一种自动化机械手及其系统,上述公开的自动化机械手注意考虑如何对抓取物品的保护,如何对多套机械手智能协调控制的问题,没有考虑到如何方便抓取曲形物体的问题。
技术实现思路
1、本发明的目的在于提供一种抓握力度可调节的自动化机械手及其调节方法,以解决上述背景技术中提出的问题。
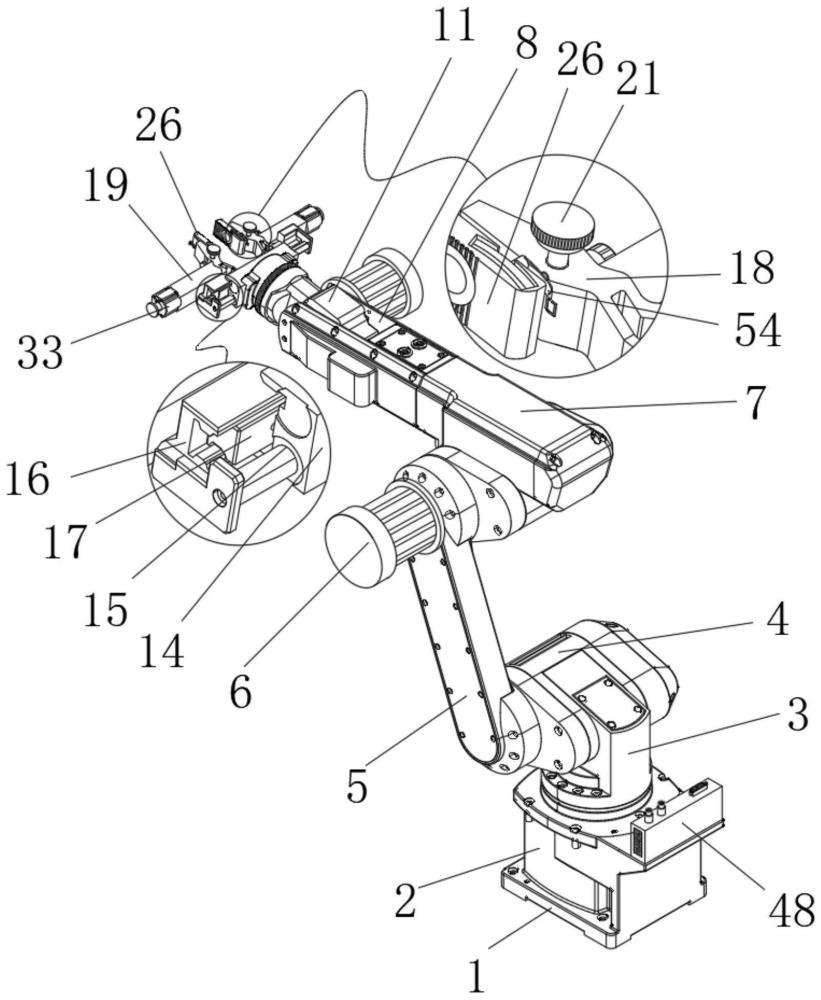
2、为实现上述目的,本发明提供如下技术方案:一种抓握力度可调节的自动化机械手,包括底座,所述底座的左上方设置有调节机构,调节机构用于调节固定抓握力度,调节机构包括调节组件和固定组件,调节组件用于调节抓握力度,而固定组件用于固定调节组件;
3、所述调节组件包括机械手,两个所述机械手的内部分别贯穿安装有调节套,两个所述机械手的左侧开设有调节槽,且调节槽与调节套的内侧相互连通,所述机械手的顶部通过轴承贯穿安装有旋杆,所述旋杆的外侧安装有齿轮,且旋杆和齿轮位于调节槽的内侧,所述调节套的内侧放置有调节板,所述调节板的左侧安装有齿条,且齿条与齿轮相啮合,所述调节板远离调节套的一端安装有连接板,所述连接板的左侧安装有手指,手指的装夹面开设有多个防滑槽。
4、优选的,所述底座的内部贯穿安装有马达,马达的顶部输出端安装有支座。
5、优选的,所述支座的顶部安装有机械臂组件,机械臂组件包括设置在支座顶部的电机,电机的正面输出端安装有大臂,大臂的正面安装有电机二,电机二的输出端贯穿大臂安装有小臂,且小臂位于大臂的背部,小臂的左侧开设有活动槽,小臂的背部安装有电机三,电机三的输出端贯穿小臂安装有转杆,转杆的外侧安装有摇臂,摇臂位于活动槽的内侧,摇臂的左侧安装有马达二,马达二的左侧输出端安装有转盘。
6、优选的,所述转盘的左侧安装有夹座,夹座的正面和背面安装有电动杆,电动杆的伸缩端安装有滑座,夹座的左侧安装有导板,且滑座位于导板的外侧,滑座的左侧与机械手相连接;
7、所述调节板的右侧安装有支板,所述支板的顶部安装有多个弹簧,所述调节板的顶部贯穿自身右侧开设有多个移动槽,移动槽的内侧贯穿放置有定位板,定位板与弹簧的顶部相连接,所述手指的装夹面镶嵌安装有压力传感器。
8、优选的,所述调节组件中设置有校准模块,校准模块用于校准压力传感器,所述校准模块包括设置在底座顶部的采集单元,所述校准模块还包括设置在调节套远离手指一端的测试单元,所述校准模块中设置的采集单元包括设置在底座顶部的采集卡;
9、所述校准模块中设置的测试单元包括设置在调节套远离手指一端的储框,储框的左侧和右侧分别安装有两个侧板,储框的顶部和底部分别安装有两个撑板,撑板远离调节套的一面安装有弹力绳,弹力绳的正面一端安装有撑块,储框的正面放置有两个盖板,且两个盖板的正面分别与撑块相连接,储框的内侧放置有砝码,砝码远离调节套的一端安装有码杆,且盖板位于码杆的两侧,码杆和砝码加在一起的重量为kg。
10、优选的,所述手指的左侧开设有收纳槽,连接板靠近齿轮的一面安装有支撑板,支撑板位于手指靠近机械手的一面,支撑板远离手指的一面安装有电动机,电动机的左侧输出端安装有丝杆,丝杆的外侧螺纹安装有推板,推板靠近手指的一面安装有尖指,尖指位于收纳槽的内侧,推板的左侧安装有折尖指。
11、优选的,所述手指的顶部开设有凹槽,凹槽靠近电动机的一面贯穿手指开设有穿槽,手指的内部开设有两个限位槽,且限位槽与凹槽相连通,凹槽的内侧放置有t弧板,且t弧板位于限位槽的内侧,t弧板的装夹面安装有弧形夹板,弧形夹板靠近t弧板的一面和t弧板的内部贯穿开设有内槽,弧形夹板的内侧安装有t型柱,且t型柱位于内槽的内侧,t型柱贯穿穿槽,t型柱右侧安装有手柄,手柄的内部贯穿螺纹安装有螺栓,手柄的内部贯穿开设有把槽,t弧板靠近手柄的一面开设有螺纹孔,螺纹孔的位置与螺栓的位置相对应,t弧板的装夹面开设有定位槽,定位槽的内侧放置有定位块,定位块与弧形夹板相连接,内槽的内侧安装有弹簧二,且弹簧二位于t型柱的外侧。
12、优选的,所述固定组件包括在两个所述机械手相互远离的一面开设的固定槽,固定槽与调节槽相连通,两个所述机械手相互远离的一面安装有护框,护框的内部贯穿螺纹安装有旋栓,旋栓的外侧通过轴承安装有橡胶塞,且橡胶塞位于齿轮的外侧。
13、优选的,自动化机械手的调节方法如下:
14、步骤1、首先工作人员需要将自动化机械手利用底座放置到工作地点处,并利用固定部件将底座稳固安装到工作地点处,并进行电性连接;
15、步骤2、之后工作人员需要根据实际情况推动转盘,使转盘带动机械臂组件中设置的马达二的输出端一同旋转,使转盘带动手指和压力传感器一同旋转九十度,同时将压力传感器与采集单元电性连接,随后再在调节套的支撑下将测试单元中设置的码杆和砝码取出并水平放置到压力传感器上与其接触,使压力传感器感知到接触面上的压力,并将压力转化为电信号,而1kg砝码所产生的标准压力数值为980pa,随后压力转化的电信号会传递给采集单元读取并显示数值,根据显示的数值和标准压力数值对比判断压力传感器是否精准,显示数值并非980pa时则需要校准压力传感器直到显示数值为980pa为止;
16、步骤3、之后工作人员需要根据实际情况操作固定组件解除对调节组件的固定作用,再操作调节组件调节手指之间的间距,通过调节手指之间的间距实现调节抓握力度,手指之间的间距越近抓握力度则越高,手指之间的距离越远抓握力度则越小,调节完成后再操作固定组件固定调节组件,进而使调节机构实现调节抓握力度;
17、步骤4、之后工作人员需要根据实际情况需要在连接板和支撑板的支撑下启动电动机,使电动机带动丝杆转动,并利用丝杆与推板的螺纹作用将尖指和折尖指分别从收纳槽和调节槽的内侧向左侧伸出,利用尖指和折尖指的尖锐形状更容易插入或夹持细小的物体;
18、步骤5、之后再根据实际情况的需要通过把槽握住手柄向上推动t型柱,使t型柱带动弧形夹板从凹槽的内侧向上移出,随后弧形夹板则会在弹簧的弹力作用下向远离t弧板的方向移动,再将螺栓螺纹安装到螺纹孔的内侧固定t型柱为弧形夹板提供支撑,利用弧形夹板抓夹曲形物体;
19、步骤6、最后再在自动化编程代码的控制下使机械臂组件运行带动手指条件位置和角度,并控制电动杆伸缩,两个使手指相互远离或靠近,使手指、弧形夹板或尖指与折尖指拿取移动或放置物体。
20、优选的,在所述步骤2和步骤6中,还包括如下步骤:
21、步骤21、一千克重的砝码在地球上受到的重力约为9.8n,而压力是单位面积上的力,砝码与压力传感器(32)之间的接触面积为1平方分米,那么砝码产生的压力计算公式为:压力=重力/接触面积=9.8n/0.01dm2=980pa;
22、所以,一千克重的砝码在接触面积为1平方分米的情况下,能产生980帕斯卡(pa)的压力;
23、步骤61、机械手编程控制代码如下:
24、#导入必要的库
25、import rospy
26、from std_msgs.msg import string
27、from geometry_msgs.msg import pose
28、#初始化ros节点
29、rospy.init_node('robot_control_node',anonymous=true)
30、#创建机械手控制器
31、robot_controller=rospy.publisher('/robot_control_topic',pose,queue_size=10)
32、#定义抓取和放置位置
33、grasp_position=pose()
34、grasp_position.position.x=0.5
35、grasp_position.position.y=0.3
36、grasp_position.position.z=0.2
37、release_position=pose()
38、release_position.position.x=0.5
39、release_position.position.y=-0.3
40、release_position.position.z=0.2
41、#发布抓取位置指令
42、robot_controller.publish(grasp_position)
43、rospy.sleep(1)#等待机械手到达目标位置
44、#发布抓取指令
45、grasp_command=string()
46、grasp_command.data='grasp'
47、robot_controller.publish(grasp_command)
48、rospy.sleep(2)#等待机械手完成抓取动作
49、#发布放置位置指令
50、robot_controller.publish(release_position)
51、rospy.sleep(1)#等待机械手到达目标位置
52、#发布放置指令
53、release_command=string()
54、release_command.data='release'
55、robot_controller.publish(release_command)
56、rospy.sleep(2)#等待机械手完成放置动作
57、#关闭机械手控制器
58、robot_controller.unregister()。
59、与现有技术相比,本发明的有益效果是:
60、1、本发明通过安装有调节机构,工作人员可以旋转固定组件中设置的旋栓,使橡胶塞移动到护框的内侧解除对齿轮的固定作用,随后推动旋杆以轴承为圆心转动,使齿轮推动齿条向远离调节套的方向平移,使调节板带动连接板和手指一同移动,同时支板和定位板会一同移动,当定位板从调节套的内侧移出后,弹簧会向上推动定位板,使定位板方便人们观察,通过移出调节套的定位板的数量判断手指的抓握力度,定位板移出的数量越多,则调节抓握力度越大,定位板移出的数量越少,则调节的抓握力度越小,调节好后工作人员需要旋转旋栓使橡胶塞与齿轮接触变形包裹固定齿轮,从而实现调节抓握力度的作用,提高灵活性。
61、2、本发明通过安装有调节套,调节套能够为储框提供稳固支撑,工作人员可以向远离调节套的方向拉动码杆,使砝码在外力的作用下利用自身弧度推动盖板分离,同时盖撑块拉伸弹力绳,直到砝码顶开盖板从储框的内侧移出到外界,之后再推动转盘,使转盘带动手指和压力传感器一同旋转九十度,同时将压力传感器与采集单元电性连接,随后再将砝码放置到压力传感器上与其接触,压力传感器感知到接触面上的压力,并将压力转化为电信号,并传递给采集单元中设置的采集卡,使采集卡读取并显示数值,根据显示的数值和标准压力数值对比判断压力传感器是否精准,从而方便校准压力传感器。
62、3、本发明通过安装有连接板,连接板能够为支撑板提供支撑,使支撑板稳固支撑电动机,工作人员可以控制电动机启动,使电动机带动丝杆转动,使推板在外力的作用下推动尖指和折尖指分别从收纳槽和调节槽的内侧向左侧移出,当手指和机械手移动时会带动折尖指和尖指一同移动,使折尖指和尖指利用自身尖锐端和外力更加容易的插入物体中,同时利用折尖指和尖指的尖锐夹持拿取细小物体。
63、4、本发明通过开设有凹槽,凹槽能够为t弧板和弧形夹板提供收纳空间,t弧板能够为t型柱提供支撑和贯穿通道,工作人员可以握住手柄向上提拉t型柱,使弧形夹板一同沿着凹槽向上完全从凹槽的内侧移出,之后弹簧二会在t弧板的支撑下在内槽的内侧向远离t弧板的方向推动弧形夹板,使手柄与t弧板贴合,之后工作人员需要旋转螺栓,利用螺栓与螺纹孔固定手柄,使手柄通过t型柱固定支撑弧形夹板,同时反弹的弹簧二和t型柱能够防止t弧板向下移动,当手指移动时会带动t弧板和弧形夹板一同移动,使两个弧形夹板可以方便夹持抓取曲形物体。
- 还没有人留言评论。精彩留言会获得点赞!