一种绳传动六自由度位姿解耦力反馈遥操作主手
本发明涉及机器人遥操作,具体涉及一种绳传动六自由度位姿解耦力反馈遥操作主手。
背景技术:
1、这里的陈述仅提供与本发明相关的背景技术,而不必然地构成现有技术。
2、随着工业和自动化技术的发展,工业机器人在装配、焊接、搬运等行业实现了自动化作业,但在高压带电、水下、高危救援、化学及放射物污染等非稳定安全环境、多样化任务作业中,很难实现机器人自动化作业,仍需要人员参与控制,主从遥操作是既保证安全又能使人员参与控制的操纵方法。
3、遥操作技术主要应用于人类本身无法直接到达或者客观的安全条件制约着人类无法进入的作业环境。主从机器人遥操作系统可在非确定环境下进行复杂的操纵作业,临场感技术为人-机器人间和机器人-环境间创建了一种和谐的多维信息交互环境,在较高级的主从系统中广泛采用力觉临场感技术,使操作者对所操纵作业的过程具有真实的力觉感受。
4、遥操作主手是一种人机交互与位置测量的装置。近年来,先进的遥操作主手加入了力反馈功能,能够提供高度的力觉临场感。这使得遥操作主手在电力领域、核工业领域、航天领域、海洋探索以及生物医学等领域得到更广泛的应用。
5、中国专利文献cn103817682b公布了“一种关节式力反馈遥操作主手”,该主手包括6个依次串联的旋转关节,每个关节处均安装有电机、减速机和电位计,该主手第二、第三和第四关节轴线平行布置,三个关节的运动存在冗余,从臂末端位姿精确控制困难;中国专利文献cn108161883a公布了“一种力反馈遥操作主手”,该主手包括6个依次串联的旋转关节,前三个关节处均安装有电机、减速机和电位计,这两款主手均可以操控关节式机械臂并为操作者提供力觉反馈。
6、目前,串联式力反馈遥操作主手与从臂之间多为关节空间映射,即主手与从臂之间的关节运动一一对应,机械臂末端位置与姿态之间存在耦合,操作员很难快速、精确地控制机械臂末端位姿;另外,主手关节通过减速机将微型电机产生的力矩放大后向操作者提供力觉反馈,而操作者操控主手时,减速机经常在减速和增速状态切换工作,大速比减速机增速工作时的摩擦力矩较大,从而造成提供给操作者的反馈力波动较大、力觉沉浸感较差。
技术实现思路
1、针对现有技术存在的不足,本发明的目的是提供一种绳传动六自由度位姿解耦力反馈遥操作主手,解决了现有串联式主手所存在的问题。
2、为了实现上述目的,本发明是通过如下的技术方案来实现:
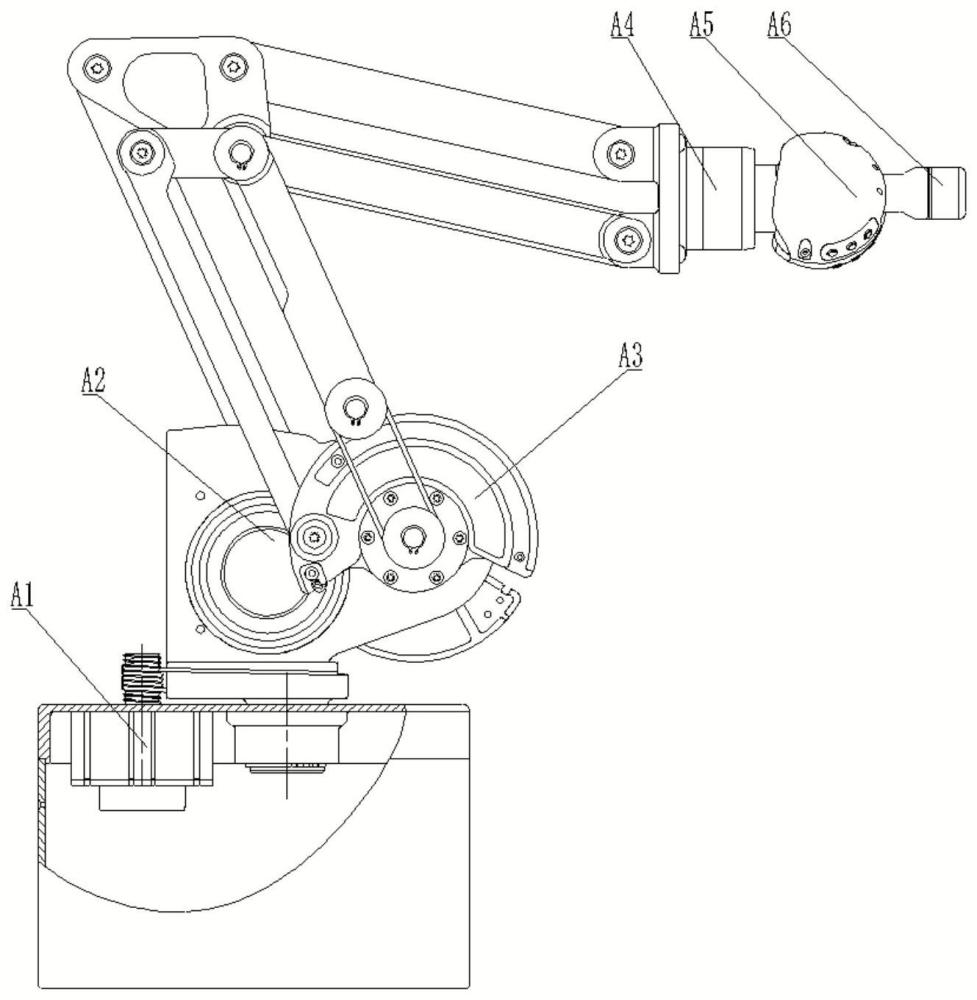
3、本发明的实施例提供了一种绳传动六自由度位姿解耦力反馈遥操作主手,包括底座,底座设有轴线竖向设置的第一力矩电机,第一力矩电机通过第一绳传动机构连接输出盘输出盘固定有轴线水平设置的第二力矩电机,第二力矩电机通过第二绳传动机构连接第一连杆组件的底端,第一连杆组件顶端与第二连杆组件一端铰接,第二连杆组件另一端与输出法兰铰接,输出法兰安装有握持部件,输出盘转动连接有轴线水平设置的第三力矩电机,第三力矩电机与第二绳传动机构连接,第二绳传动机构的从动绳轮与主动连杆的一端铰接,主动连杆的另一端与第二连杆组件铰接,输出法兰、第二连杆组件和输出盘之间设有拉杆组件以使得握持组件能够始终保持与底座平行。
4、可选的,所述第一力矩电机包括第一壳体,第一壳体与底座固定,第一壳体内部固定有第一力矩电机定子,第一力矩电机定子内部转动连接有第一力矩电机转子,第一力矩电机转子套接固定在第一输出轴外周,第一输出轴通过第一绳传动机构与输出盘连接;
5、进一步的,所述第一壳体和第一输出轴之间安装有第一编码器。
6、可选的,所述第二力矩电机包括第二壳体,第二壳体与输出盘固定,第二壳体内固定有第二力矩电机定子,第二力矩电机定子内转动连接有第二力矩电机转子,第二力矩电机转子套接固定在第二输出轴外周,第二输出轴通过第二绳传动机构与第一连杆组件的一端固定连接以带动第一连杆组件在竖向平面内摆动;
7、进一步的,所述第二壳体和第二输出轴之间安装有第二编码器。
8、可选的,第一连杆组件包括平行设置的第一连杆和第二连杆,第一连杆的底端通过第二绳传动机构与第二力矩电机连接,其顶端与第二连杆组件铰接,第二连杆的底端与第三力矩电机的壳体固定,第二连杆的顶端与第二连杆组件铰接。
9、可选的,所述第二连杆组件包括平行设置的第三连杆和第四连杆,其中第三连杆的一端与输出法兰铰接,第三连杆与第一连杆的顶端铰接,第四连杆的一端与输出法兰铰接,第四连杆与第二连杆的顶端铰接。
10、可选的,所述第三力矩电机包括第三壳体,第三壳体与输出盘转动连接,第三壳体内固定有第三力矩电机定子,第三力矩电机定子内转动连接有第三力矩电机转子,第三力矩电机转子套接固定在第三输出轴外周,第三输出轴通过同步带机构与第三绳传动机构的主动绳轮连接;
11、进一步的,第三输出轴与第三壳体之间安装有第三编码器;
12、进一步的,第三绳传动机构的主动绳轮与轮轴连接,轮轴穿过第一连杆组件并与第一连杆组件转动连接,第三绳传动机构的从动绳轮与第三壳体转动连接。
13、可选的,所述拉杆组件包括第一拉杆,第一拉杆底端与输出盘转动连接,顶端与联杆件的第一端部铰接,联杆件的第二端部与第二连杆组件铰接,联杆件的第三端部与第二拉杆的一端铰接,第二拉杆的另一端与输出法兰铰接。
14、可选的,所述握持部件包括空心的第一转轴,第一转轴与第四壳体转动连接,第四壳体与输出法兰固定,球形头内设有与第一转轴相垂直的第二转轴,球形头通过第二转轴与第一转轴端部转动连接;
15、进一步的,所述第一转轴与第四壳体之间安装有第四编码器;
16、进一步的,所述第一转轴外周套有第一阻尼元件,所述第四壳体螺纹连接有第一调节螺钉,第一阻尼元件与第四壳体之间设有第一调整片,第一调节螺钉压迫第一调整片与第一阻尼件摩擦,产生阻尼作用;
17、进一步的,球形头的第二转轴与第一转轴之间设有第五编码器;
18、进一步的,所述第二转轴外周套接有第二阻尼元件,第二阻尼元件与位于球形头内部的第二调整片摩擦接触以产生阻尼作用。
19、进一步的,所述球形头上安装有按钮安装面板,按钮安装面板上安装有多个按钮开关以控制从端机械臂的执行设备工作。
20、可选的,所述球形头与被动转轴的一端转动连接,被动转轴的另一端固定有主动转轴,主动转轴与第二转轴和移动转轴两两垂直,主动转轴外周转动连接有旋钮座,旋钮座外周设置有与主动转轴转动连接的旋钮;
21、进一步的,主动转轴和旋钮之间安装有第六编码器;
22、可选的,所述主动转轴外周套接有第三阻尼元件,所述旋钮上螺纹连接有第二调节螺钉,主动转轴和第三阻尼件之间设有第三调整片,第二调节螺钉压迫第三调整片与第三阻尼件摩擦,产生阻尼作用。
23、本发明的有益效果如下:
24、1.本发明中的遥操作主手,设置有第一力矩电机、第二力矩电机和第三力矩电机,并通过绳传动机构向三个关节施加力矩,从而为操作者提供上下、左右、前后三个方向上的力觉反馈;绳传动结构简单、无间隙、逆驱性好,显著减小了齿轮传动的顿挫感和逆驱时的摩擦力矩,提高了操作者舒适性。
25、2.本发明中遥操作主手,通过第一连杆组件、第二连杆组件和拉杆组件可实现握持部件在三维空间中的任意运动,且始终保持握持部件的轴线与底座平行即水平姿态保持不变;握持组件设有第一转轴,第四壳体与第一转轴转动连接,还设有第二转轴和被动转轴,第二转轴与第一转轴相互垂直,被动转轴与第二转轴和第一转轴垂直,三个转动轴线垂直相交于一点,用于控制从臂末端的姿态(俯仰、横滚和偏航角);将主手后三节关节轴线交点映射为从臂末端作业点,则主手握持部件前方的关节控制从臂末端作业点的位置变化,而主手握持部件的各个关节的运动控制从臂末端的姿态变化,从而实现遥操作过程中从臂末端位置和姿态的解耦控制,与关节映射相比,使操作者更关注从臂末端的作业控制,操作员能够快速、精确地控制机械臂末端位姿。
26、3.本发明的遥操作主手,球形头中安装的多组按钮开关可用于控制从端机械臂末端附加的电气、液压或气动工具等执行设备工作,具有多样化作业操控能力。
27、4.本发明的遥操作主手,采用球形头,更加符合人体工程学设计,显著减轻操作者长时间操作的手部疲劳感。
- 还没有人留言评论。精彩留言会获得点赞!