操控台及机器人的制作方法
本公开涉及主从控制机器人,具体涉及一种包括主操作手的操控台以及包括该操控台的机器人。
背景技术:
1、主从控制机器人通常包括主操作端和从动端。在主从控制机器人系统中,主操作端的主操作手作为操作者与机器人之间的交互设备,向从动端传递操作者给出的位姿、速度等信息,同时也可向操作者传递从动端受到的力/力矩等环境信息,让操作者直观感受到从动端接收的力的信息,使其具有操作临场感,可及时对从动端系统的运动做有效的控制和干预。由于主从控制机器人的上述特性,使得其用作手术机器人在医疗服务领域的优势日益凸显。
2、在手术机器人中,主操作手是医生与从动端机械臂之间传递信息的载体,用以辅助医生进行精准的操作。主操作手包括静平台、动平台以及连接在静平台和动平台之间的多个连接臂,手柄安装在动平台上,操作者通过手柄来控制连接臂相对于静平台的伸缩和旋转。
3、主操作手自身的重力会影响操作者的操作体验,如果不对重力进行补偿或重力平衡效果不理想,操作者在操作过程中需要克服主操作手自身重力的影响,长时间操作的情况下肌肉会感到疲劳。另一方面,主操作手自身的重力还会影响操作者对力反馈真实性的感知,如果不对重力进行补偿,操作者感受到的将是主操作手自身重力和反馈力的合力,降低操作沉浸感。另外,主操作手自身的结构设计也会影响操作者的操作体验,如主操作手的结构设计不合理,会增加操作的疲劳感,降低操作的舒适性。
4、现有技术中的主操作手存在限制操作者的操作体验的问题。
技术实现思路
1、本发明的主要发明目的之一在于提供一种操控台及机器人,以解决相关技术中操控台的主操作手的操作体验不佳的问题。
2、根据本发明的一部分,提供一种操控台,所述操控台包括主操作手,所述主操作手可包括:静平台;动平台,设置在所述静平台一侧;手柄,与所述动平台连接;以及连接臂,所述连接臂的两端分别铰接连接到所述静平台和所述动平台,所述连接臂包括n个支链组件,其中,n大于等于3,即,所述连接臂至少包括第一支链组件、第二支链组件和第三支链组件,所述第一支链组件至第n支链组件分别在第一静铰接点至第n静铰接点处铰接到所述静平台,其中,所述主操作手还包括用于驱动每个支链组件相对于所述静平台旋转的n个第一驱动组件,并且其中,所述静平台与水平面的夹角小于45度。
3、所述静平台与水平面的夹角可小于等于10度。
4、所述夹角可等于0度或者5度。
5、所述静平台和/或所述动平台的周向可分为相对的周向第一侧和周向第二侧,相对于所述周向第二侧,所述n个支链组件围绕所述静平台和/或所述动平台布置在所述静平台和所述动平台的周向第一侧,所述周向第二侧的角度范围为大于等于150度且小于300度。
6、所述周向第二侧的角度范围可为180度。
7、所述n个支链组件在所述周向第一侧中沿圆周方向可均匀布置;和/或,所述手柄可位于所述周向第二侧的中间位置。
8、n个所述第一驱动组件可布置在所述周向第一侧所在的区域内;和/或,所述第一支链组件的第一驱动组件可布置在所述静平台的投影区域内。
9、所述第一支链组件、所述第二支链组件和所述第三支链组件可分别通过第一静铰接点、第二静铰接点、第三静铰接点连接到所述静平台,第一静铰接点、第二静铰接点、第三静铰接点可位于第一圆上,所述第一支链组件对应的第一驱动组件和所述第三支链组件对应的第一驱动组件可布置在所述第一圆的同一条直径上,所述第一支链组件对应的第一驱动组件的输出轴和所述第三支链组件对应的第一驱动组件的输出轴可朝向同一侧。
10、所述第一静铰接点至所述第n静铰接点可分别与所述静平台的虚拟中心连接形成第一虚拟直线至第n虚拟直线,其中,相邻的两条虚拟直线之间可形成夹角,所述第一虚拟直线至第n虚拟直线可形成n个夹角,其中,第n虚拟直线与第一虚拟直线之间形成的第n夹角可大于等于150度且小于300度。
11、所述第一支链组件至第n支链组件分别在第一动铰接点至第n动铰接点处铰接到所述动平台,所述动平台与所述静平台彼此平行地设置,其中,所述第一支链组件至第n支链组件从所述动平台向所述静平台的投影分别与所述第一虚拟直线至所述第n虚拟直线重合。
12、所述第n夹角可等于180度;和/或,所述n个夹角之和可等于360度,除所述第n夹角之外的其他夹角可彼此相等。
13、所述手柄可位于所述第一支链组件与所述第n支链组件之间;和/或,所述n可为奇数,所述手柄与第(n+1)/2个支链组件在所述静平台上的投影可位于同一直线上。
14、所述手柄可包括握持部,所述握持部与水平面可呈预定角度设置,和/或,所述握持部与所述静平台可呈所述预定角度设置。
15、所述预定角度可为45度至90度;和/或,所述预定角度与所述支链组件和所述静平台之间的夹角可接近或相等。
16、所述手柄可设置于所述静平台与所述动平台之间;和/或,所述动平台可设置在所述静平台的上方,所述第一驱动组件可设置在相应的支链组件的下端。
17、所述第一驱动组件的驱动力可通过齿轮组传递到相应的支链组件,所述齿轮组可包括与所述第一驱动组件的输出轴连接的主动齿轮以及可转动地设置在所述静平台上并与所述主动齿轮啮合的从动齿轮,所述从动齿轮的旋转轴可与相应的支链组件连接。
18、所述主动齿轮可包括同轴并排设置并且结构相同的第一主动齿轮和第二主动齿轮,所述第一主动齿轮的传动齿和第二主动齿轮的传动齿可在旋转方向上错位设置;和/或,所述从动齿轮可包括同轴并排设置并且结构相同的第一从动齿轮和第二从动齿轮,所述第一从动齿轮的传动齿和第二从动齿轮的传动齿可在旋转方向上错位设置。
19、所述第一主动齿轮的传动齿和第二主动齿轮的传动齿之间的错位距离可大约等于所述第一主动齿轮和所述从动齿轮之间的传动间隙;和/或,所述第一从动齿轮的传动齿和第二从动齿轮的传动齿之间的错位距离可大约等于所述主动齿轮和所述第一从动齿轮之间的传动间隙。
20、所述从动齿轮可为扇形齿轮,所述扇形齿轮的扇形角度可为60度至150度,所述扇形齿轮可设置为镂空形状;和/或,所述主动齿轮与所述从动齿轮的传动可为2:1至10:1。
21、所述第一支链组件、所述第二支链组件和所述第三支链组件中的每个可包括铰接到所述静平台的连接支架、沿所述连接支架移动的推拉杆和设置在所述连接支架上的第二驱动组件,所述第二驱动组件可包括动子和定子,所述动子与所述推拉杆可固定连接并同步运动;和/或,每个支链组件可通过铰接副与所述动平台转动连接,所述铰接副可包括:第一连接块,第一连接块呈u型,包括彼此相对的第一支撑部和第二支撑部以及连接所述第一支撑部和所述第二支撑部的一端的连接支撑部;以及第二连接块,可旋转地安装在所述第一支撑部和所述第二支撑部上,其中,所述连接支撑部可通过第一转轴与相应的支链组件转动连接,所述第二连接块可通过第二转轴与所述动平台转动连接,其中,所述第一转轴的中心轴线可平行于所述第一支撑部和所述第二支撑部的延伸方向,并与所述第二连接块在所述第一支撑部和所述第二支撑部上旋转的旋转轴线垂直。
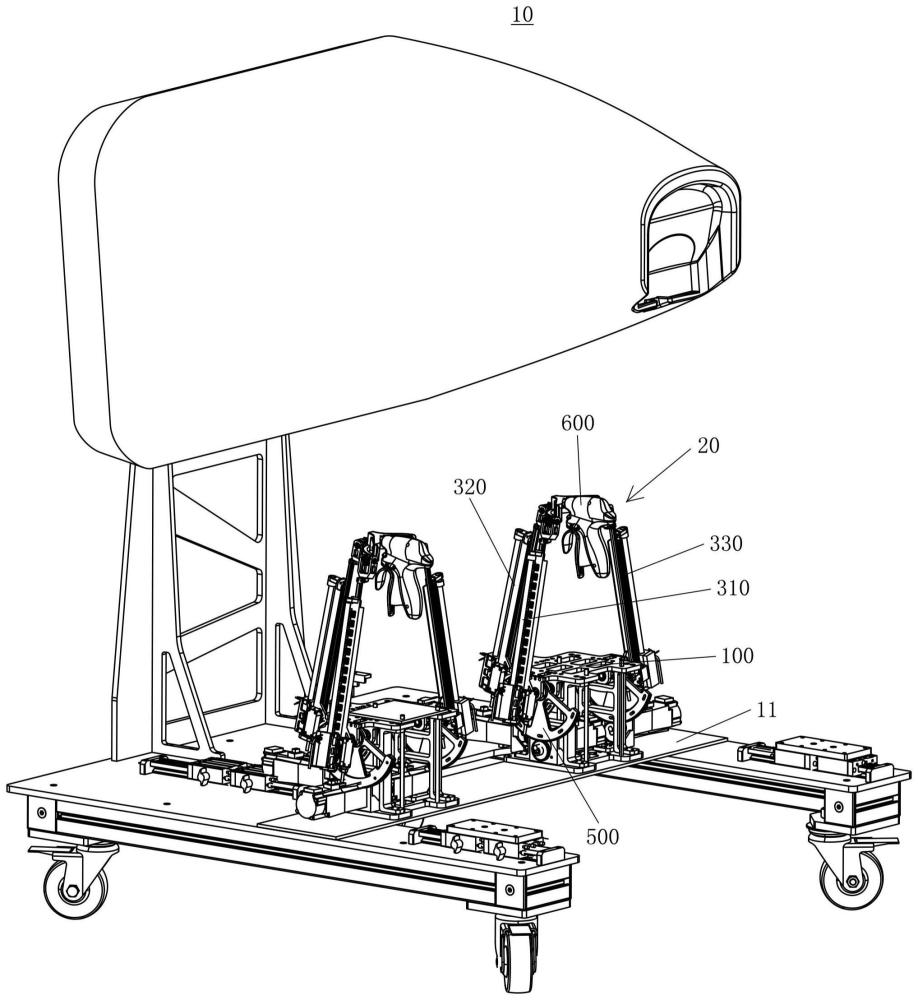
22、所述操控台可包括两个所述主操作手,所述两个主操作手可对称地布置,且所述第n夹角的开口可朝向同一侧,其中,所述手柄在所述静平台上的投影可位于第n夹角内。
23、所述操控台可包括两个所述主操作手,所述两个主操作手可对称地布置在操控台的底板上,其中,分别驱动所述两个主操作手的所述第一支链组件和所述第三支链组件的绕各自的静铰接点旋转的四个第一驱动组件可沿同一直线设置。
24、分别驱动所述两个主操作手的所述第二支链组件可绕各自的静铰接点旋转的第一驱动组件平行设置;和/或,分别驱动所述两个主操作手的所述第一支链组件的两个第一驱动组件可位于所述静平台的下方。
25、根据本发明的又一方面,提供一种机器人,所述机器人可包括如上所述的操控台。
26、所述机器人可为手术机器人。
27、根据本发明的实施例,通过将静平台与水平面的夹角设置为小于45度,可以较大限度地平衡重力,同时降低了对旋转驱动组件的要求,减小旋转驱动组件的体积,提高操控台的主操作手的设计空间。
28、根据本发明的实施例,通过利用两个齿轮错位布置来消除传动间隙,避免了延迟啮合而发生的抖动现象。
29、根据本发明的实施例,通过设置扇形齿轮和合适的传动比,降低了旋转惯量,降低了迟滞感,提高了操作者的手感。
30、根据本发明的实施例,通过设计包括u型连接件的铰接副,避免了动平台与铰接副的干涉,扩大了动平台的运动范围。
- 还没有人留言评论。精彩留言会获得点赞!