一种机器人数字孪生虚实交互系统、方法、设备及介质
本发明涉及数字孪生机器人,特别是涉及一种机器人数字孪生虚实交互系统、方法、设备及介质。
背景技术:
1、煤矿井下环境复杂多变,随着煤矿产业的智能化发展,煤矿巡检机器人的研究应用也是促进煤矿无人化、智能化发展的重要因素。在机器人的传统开发中,机器人需经历设计、理论分析、制造、样机调试等过程。每一过程都需要消耗大量的时间。不仅如此,验证设计的合理性;理论分析与实际环境的差异性;制造耗时长、成本高以及装配过程发现的加工误差或结构材料不合理需要返工造成进一步的时间消耗;调试过程繁琐,大大阻碍了研究进展和开发效率。
2、在机器人的操作技术中,提升远程操作人员的临场感也是研究重点,而普通的传感设备,如摄像机、激光雷达等仅能识别机器人周边环境,并不能给出操作员准确的判断依据。因此,现有传统机器人的操控准确率及可靠性均不高。
技术实现思路
1、本发明的目的是提供一种机器人数字孪生虚实交互系统、方法、设备及介质,能够加快机器人测试控制算法在机器人实体的调试,并实时、精确的监测机器人运行状况,及时避免故障发生。
2、为实现上述目的,本发明提供了如下方案:
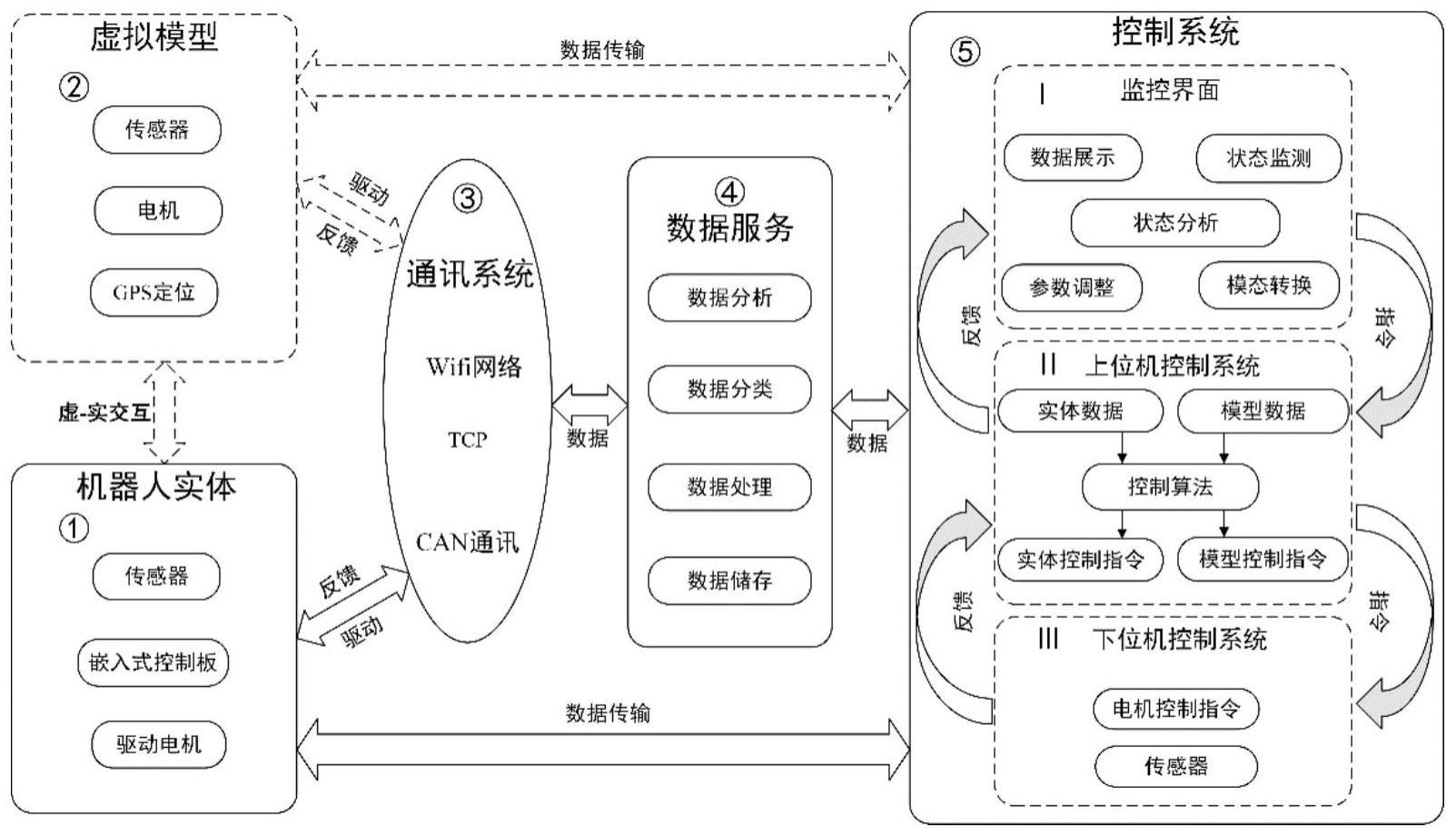
3、一种机器人数字孪生虚实交互系统,包括:机器人实体、虚拟模型、控制系统、数据服务系统和通讯系统;
4、所述机器人实体,用于采集实体数据;所述实体数据包括环境数据和机器人数据;所述环境数据包括地形场景和周边环境;所述机器人数据包括电机运转、机器人中心高度、躯体转角、前进方向和速度;
5、所述虚拟模型,用于对所述实体数据进行数据虚实交互,生成孪生数据,以及映射模拟机器人运行状态;
6、所述控制系统,用于根据控制算法和所述孪生数据进行指令控制,输出孪生控制指令,并实时监测及调整机器人运行模态控制;所述孪生控制指令包括实体控制指令和模型控制指令;所述实体控制指令用于控制所述机器人实体进行调试;所述模型控制指令用于控制所述虚拟模型进行调试;
7、所述数据服务系统,用于存储并处理传输中的各数据;所述处理包括数据滤波、分析和格式转换;
8、所述通讯系统,用于连接各系统,并对各系统的数据进行传输。
9、可选地,所述机器人实体,具体包括:轮腿分离式轮腿四足机器人和与所述轮腿分离式轮腿四足机器人连接的传感单元和自主决策模块;所述传感单元包括:感知模块、图像采集模块、状态监测模块和控制模块;
10、所述感知模块,用于利用环境检测传感器感知所述轮腿分离式轮腿四足机器人的周边环境;所述周边环境包括障碍物、温湿度、气体成分及浓度;
11、所述图像采集模块,用于利用视觉传感器采集地形场景;
12、所述状态监测模块,用于采集所述机器人数据;
13、所述自主决策模块,用于根据所述周边环境、所述机器人数据和所述地形场景进行自适应决策;所述自适应决策包括高度自适应、姿态自适应、步态自适应及运行模态自适应;
14、所述控制模块,用于根据所述实体控制指令执行控制操作。
15、可选地,所述虚拟模型,具体包括:数据模型和图像模型;
16、所述数据模型,用于对所述实体数据进行数据虚实交互,生成孪生数据;
17、所述图像模型,用于以在线和离线两种方法映射模拟机器人运行状态。
18、可选地,所述控制系统,具体包括:上位机控制系统、下位机控制系统和虚实交互监控界面;
19、所述上位机控制系统,用于根据控制算法和所述孪生数据进行指令控制,输出孪生控制指令;
20、所述下位机控制系统,用于接收所述上位机控制系统输出的所述孪生控制指令,并控制机器人运行,同时获取打包机器人运行状态数据并上传至所述上位机控制系统和所述数据服务系统;
21、所述虚实交互监控界面用于通过轻量化图形、文本框、曲线的形式实时监测机器人运行状况,以及利用控制按钮转变机器人运行模态。
22、本发明还提供了一种机器人数字孪生虚实交互方法,包括:
23、采集实体数据;所述实体数据包括环境数据和机器人数据;所述环境数据包括地形场景和周边环境;所述机器人数据包括电机运转、机器人中心高度、躯体转角、前进方向和速度;
24、对所述实体数据进行数据虚实交互,生成孪生数据,以及映射模拟机器人运行状态;
25、根据控制算法和所述孪生数据进行指令控制,输出孪生控制指令,并实时监测及调整机器人运行模态控制;所述孪生控制指令包括实体控制指令和模型控制指令;所述实体控制指令用于控制所述机器人实体进行调试;所述模型控制指令用于控制所述虚拟模型进行调试;
26、对传输中的各数据进行存储及处理;所述处理包括数据滤波、分析和格式转换。
27、可选地,所述实时监测及调整机器人运行模态控制,具体包括:
28、根据功能需求分别设置gui显示界面和gui控制界面;
29、利用设置好的gui显示界面和设置好的gui控制界面进行实时监测及调整机器人运行模态控制。
30、可选地,所述gui显示界面的设置方法为:
31、s101:依据所需虚实运动交互数据设计读取界面,界面包括speedgoat连接按钮、系统运行状态指示灯、虚实交互系统开关、模态切换旋钮、数据显示文本框、数据曲线分析区域、仪表观察区域、数据保存按钮、虚实交互分析和零部件实时应力分析子界面;
32、s102:所述虚实交互分析子界面用于实时检测分析虚拟模型与实物样机的同步性,并通过点击主界面“虚实交互分析”按钮打开;
33、s103:所述零部件实时应力分析子界面用于实时分析实物样机腿结构零部件受力状况,根据机器人正常运行状况时的应力区间,实时筛选超出区间范围的零部件并通过状态指示灯及文本框报警,根据电机输出扭矩实时分析机器人关键零部件的受力、应力状况,若某个零部件的应力数值过大,则表明机器人处于非正常状态下工作,子界面通过点击主界面“虚实交互分析”按钮打开;
34、s104:所述数据显示文本框包括机器人机身行走速度、陀螺仪、机身行走高度及各腿部关节显示;所述陀螺仪包括俯仰角、横滚角和偏航角;
35、s105:所述数据曲线分析区域包括机器人机身高度、机身移动速度、陀螺仪数据变化和触地足端力;
36、s106:所述仪表观察区域包括机器人各电机的转动位置、速度、扭矩和温度,通过分析这些数据,判断机器人运行是否进入异常状态;
37、s107:数据保存按钮用于对本次运行数据进行分类并保存本次运行数据。
38、可选地,所述gui控制界面的设置方法为:
39、s201:依据所需虚实运动交互的控制要求,控制界面需设计包括机器人的控制方式、运动模态、运行模态、运行参数、姿态控制和修改控制系统;
40、s202:所述控制方式包括gui控制界面控制和手柄控制两种方式。gui控制界面控制指直接在gui控制界面进行机器人的控制;手柄控制是通过蓝牙通讯与控制系统建立连接的手柄,所述手柄实时控制系统输入的控制指令,运行手柄控制需首先在gui控制界面点击“手柄控制”按钮;
41、s203:所述机器人运动模态包括行走模态、轮模态、轮腿混合模态和双臂夹持模态,通过使用已经规划好的模态切换轨迹,进行不同运动模态的稳定切换,所述切换轨迹为五次多项式的轨迹;
42、s204:所述运行模态为机器人的不同运行状态,包括机器人的站立、踏步、躯体扭动和行走,以及轮模态下的夹持姿态;
43、s205:所述运行参数包括机器人虚拟力控下的比例、微分控制参数,gui控制界面用于对机器人14个电机运行下的比例、微分参数进行实时调整;
44、s206:所述姿态控制包括机器人的俯仰角、横滚角、偏航角和躯体高度的控制,姿态控制通过gui控制界面的滑块进行实时修改;
45、s207:所述修改控制系统用于对机器人的控制算法进行更新、修改,通过点击gui控制界面中插入的控制系统图片,并打开上位机控制系统进行控制算法的修改。
46、本发明还提供了一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行根据上述的机器人数字孪生虚实交互方法。
47、本发明还提供了一种计算机可读存储介质,其存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的机器人数字孪生虚实交互方法。
48、根据本发明提供的具体实施例,本发明公开了以下技术效果:
49、本发明公开了一种机器人数字孪生虚实交互系统、方法、设备及介质,所述系统包括机器人实体、虚拟模型、控制系统、数据服务系统和通讯系统;其中,机器人实体用于采集实体数据;虚拟模型用于对所述实体数据进行数据虚实交互,生成孪生数据,以及映射模拟机器人运行状态;控制系统用于根据控制算法和所述孪生数据进行指令控制,输出孪生控制指令,并实时监测及调整机器人运行模态控制;进而通过孪生控制指令的实体控制指令和模型控制指令控制所述机器人实体和所述虚拟模型进行调试;数据服务系统和通讯系统用于存储、传输以及处理传输中的各数据。因此,本发明基于上述连接方式,以及各系统所实现的功能,能够提高虚拟模型和机器人实体的实时同步性程度,加快机器人测试控制算法在机器人实体的调试,并实时、精确的监测机器人运行状况,及时避免故障发生。
- 还没有人留言评论。精彩留言会获得点赞!