一种用于六自由度工业机器人的大臂结构的制作方法
本发明涉及工业机器人配件,具体为一种用于六自由度工业机器人的大臂结构。
背景技术:
1、六自由度工业机器人是典型的机电一体化产品,其动作灵活性高,工作空间范围大,可以很灵活地绕过障碍物,并且结构紧凑,占地面积也比较小,关节上相对运动部件容易密封防尘,广泛应用在机床上下料、取件、弧焊、喷漆等行业,同时在使用六自由度工业机器人的时候,六自由度工业机器人包括机器人大臂、机器人小臂、机器人转盘与机器人滑轨共同组装成为六自由度工业机器人。
2、目前工作人员在使用六自由度工业机器人上的机器人大臂安装的时候,在转动的时候会出现卡位的现象,这时候需要人员通过人力对其进行修订与更改,同时修订的时候,人员可能会出现数据差错,导致无法进行修正。
技术实现思路
1、针对现有技术的不足,本发明提供了一种用于六自由度工业机器人的大臂结构,解决了转动的时候会出现卡位的现象,无法进行快速地修订与更改,同时修订的时候,同时人员可能会出现数据差错,导致无法进行修正的问题。
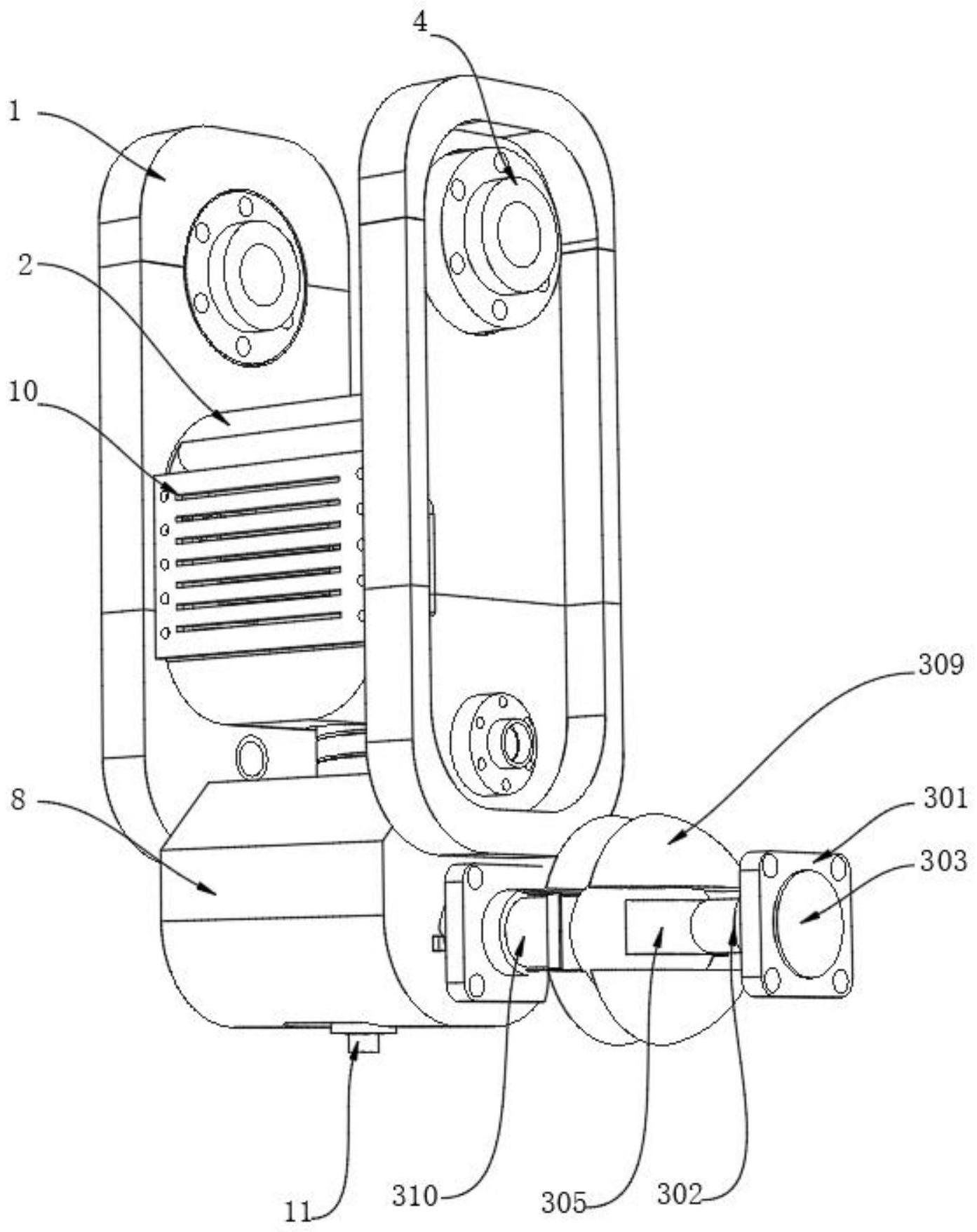
2、为实现以上目的,本发明通过以下技术方案予以实现:一种用于六自由度工业机器人的大臂结构,包括大臂结构本体,所述大臂结构本体的顶部固定套接有法兰盘三,所述大臂结构本体的底部安装有控制器,所述控制器的底部焊接有传感器,所述控制器的右侧安装有转向辅助结构;
3、所述转向辅助结构包括法兰盘一,所述法兰盘一的右侧固定焊接有垫圈,所述法兰盘一的左侧固定连接有橡胶环,所述橡胶环的左侧安装有固定杆一,所述橡胶环的左侧固定套接有限位环一,所述限位环一的左端滑动连接在环形球外侧,所述环形球的外侧焊接有左右上下相对的半弧板,所述环形球的左侧滑动连接有限位环二,所述限位环二的左侧安装有固定杆二,所述固定杆二的左侧安装有法兰盘二,所述法兰盘二的左侧焊接有卡环,所述卡环的左侧固定连接有弹簧,所述卡环的左侧卡合连接有限位孔。
4、优选的,两个所述大臂结构本体之间均焊接有下位架,所述下位架的内侧开设有左右相对的散热孔,所述下位架的内部安装有散热器,所述散热器的外侧安装有左右相对的风扇。
5、优选的,所述大臂结构本体的底部外侧固定套接有法兰盘四,所述法兰盘四的下端设置有限位环二,所述限位环二的右侧设置有橡胶环,所述橡胶环位于控制器的右侧。
6、优选的,所述控制器的顶部固定套接与直杆,所述直杆的顶部螺接有下位架,所述下位架的外侧贴合连接有过滤网。
7、一种用于六自由度工业机器人的大臂结构的系统,包括控制器与传感器,所述传感器与控制器相连,通过传感器使用,能够在大臂转动的时候可以将数据传输与人员操作传输进入到控制器中,所述控制器与检测模块相连,用于能够对其大臂结构本体内部转动的情况进行检测,所述检测模块与限位模块相连,用过在对机械大臂检测是否进行限位运动,所述限位模块与转向模块相连,用于能够通过限位模块对其机械大臂进行限位后,同时通过转向模块的辅助能够便于转动,所述转向模块与控制模块相连,通过控制模块的使用可以在机械大臂进行转动的时候能够进行控制,所述控制模块与测算模块相连,用于能够在对其机械大臂进行控制后,能够对其转动的数据进行测算,反馈给终端。
8、优选的,所述检测模块包括启停单元、传输单元、检测单元、压力检测单元与感应单元,所述启停单元与传输单元相连,通过启停单元的使用,能够对其机械人的大臂转动转动的时候进行及时停止,同时通过传输单元便于数据进行传输,所述启停单元与检测单元相连,用于检测单元能够对其启停单元启停的时候进行检测,减少大臂结构在使用的时候出现数据差错的现象,所述检测单元与压力检测单元相连,用于能够在对大臂结构本体整体进行检测的时候,也通过压力检测单元对其压力进行数据检测,所述传输单元与感应单元相连,用于能够在转动的时候对其转动进行感应。
9、优选的,所述控制模块包括测温模块、传导单元、散热单元、终端传输单元与技数单元,所述测温模块与传导单元相连,通过测温模块能够对大臂结构本体转动的时候温度进行测算,同时通过传导单元将热量统计的数据进行传输,所述传导单元与散热单元相连,用于能够通过散热单元将内部的热量传递出去,所述测温模块与终端传输单元相连,用于能将数据传输进行反馈与显示,所述测温模块与技数单元相连,用于能够对大臂结构本体测温的时候内部的温度进行统计与计数。
10、优选的,所述转向模块包括、驱动单元、显示单元、数模转换单元与修订单元,所述与驱动单元相连,用于优化大臂结构本体进行转动,所述驱动单元与数模转换单元相连,用于在驱动转向辅助结构转动能够对传动的数据进行转换,所述数模转换单元与显示单元相连,用于在对数据转换完成后,可以通过显示单元将数据显示出来,所述显示单元与修订单元相连,用于能够对大臂结构本体进行转动的时候,进行自动修订。
11、优选的,所述限位模块包括防卡单元、转向单元、对比单元一与传输控制单元,所述防卡单元与转向单元相连,用于减少大臂结构本体在转动时卡位的现象,所述转向单元与对比单元一相连,用于在转向单元进行使用下对其对比,为其人员提供数据支撑,所述对比单元一与传输控制单元相连,用于能够在传输对比数据的时候,能够增加工作人员对其大臂结构本体的控制能力。
12、优选的,所述测算模块包括算法单元、控制单元、存储单元与对比单元二,所述算法单元与控制单元相连,用于通过算法单元的使用配合,提升人员的操作能力,所述控制单元与存储单元相连,用于能够将控制单元操作所产生的反馈数据进行存储,降低出现数据丢失的情况,所述算法单元与对比单元二和存储单元相连,用于能够将存储的历史数据与现有数据进行对比,降低人员操作的失误现象。
13、工作原理:首先工作人员可以将垫圈固定在机器人转盘上,同时法兰盘一将会通过外接螺栓将其进行锁紧,当需要对其大臂结构本体整体进行旋转的时候,人员可以通过橡胶环与限位环一在环形球上进行滑动转动,并且通过半弧板将会限制限位环一与限位环二的转动,使其能过根据人员的操作进行转动,随后将固定杆二进行对接安装的时候,人员可以通过垫圈与法兰盘二的协同转动,使其能过驱动卡环成功卡合在开设在控制器内部的限位孔,同时限位孔右侧安装的弹簧将会对安装进行限位,随后当对大臂结构本体进行转动的时候,位于大臂结构本体底部的控制器将会通过传感器进行控制,随后检测模块将会对大臂结构本体内部转动的时候进行检测,当检测的时候出现大臂结构本体出现卡位的时候,将会通过限位模块对其进行调整,随后通过转向模块将可以对其大臂结构本体转动的方向位置进行限制,其次通过控制模块与测算模块配合,使其大臂结构本体在进行使用的时候,可以通过算法单元对其大臂结构本体产生的数据进行测算,同时通过控制单元能够优化人员的对其大臂结构本体进行操作,降低出现操作风险,随后对其大臂结构本体进行测算,测算出大臂结构本体能够是否进行运行,随后将数据重新输送进入到检测模块中,进行二次检测,当大臂结构本体内部没有出现问题的时候,将会驱动大臂结构本体转动。
14、本发明提供了一种用于六自由度工业机器人的大臂结构。具备以下有益效果:
15、1、本发明通过转向辅助结构内部的垫圈、橡胶环、半弧板与环形球的限制能够驱动法兰盘二与法兰盘一进行转动,随后能够便于大臂结构本体进行左右晃动,同时能够驱动卡环成功卡合在限位孔中,同时能够增加大臂结构本体的转动能力,降低大臂结构本体在转动的时候出现卡位的现象。
16、2、本发明通过控制器、传感器、检测模块、限位模块、转向模块、控制模块与测算模块之间结构的配合,能够通过检测模块对其大臂结构本体在使用的时候进行整体检测,使其能够对其大臂结构本体使用的时候安全性,同时通过限位模块与转向模块增加大臂结构本体转动的现象,随后通过控制模块能够对其进行控制,随后测算模块将会对其操作的数据进行测算,优化大臂结构本体的操作能力。
- 还没有人留言评论。精彩留言会获得点赞!