一种用于机器人上下料的单相和三相电能表兼容抓手的制作方法
本发明涉及机器人抓手,特别是涉及一种用于机器人上下料的单相和三相电能表兼容抓手。
背景技术:
1、在大规模的多尺寸电能表分类工作中,通常会使用机器人抓手来完成分类任务。然而,由于电能表尺寸的多样性,同一台机器人抓手往往无法灵活地进行不同数量和尺寸电能表抓取工作。为了解决这个问题,需要配备不同尺寸的抓手夹具,在分类过程中通过人工将原夹具拆卸下来,更换另一尺寸的夹具,以适应不同电能表的尺寸。但使用这种方法进行上下料操作,不仅增加了夹具的加工成本,也增加了分类工作的难度,影响工作效率。因此,如何改进机器人抓手的设计,使其能够灵活适应不同尺寸的电能表,减少夹具更换和调整的要求,提高工作效率,是一个值得探索的方向。
技术实现思路
1、发明目的:本发明的目的是提供一种抓取精度和工作效率高的、兼容单相电能表与三相电能表抓取工作的用于机器人上下料的单相和三相电能表兼容抓手。
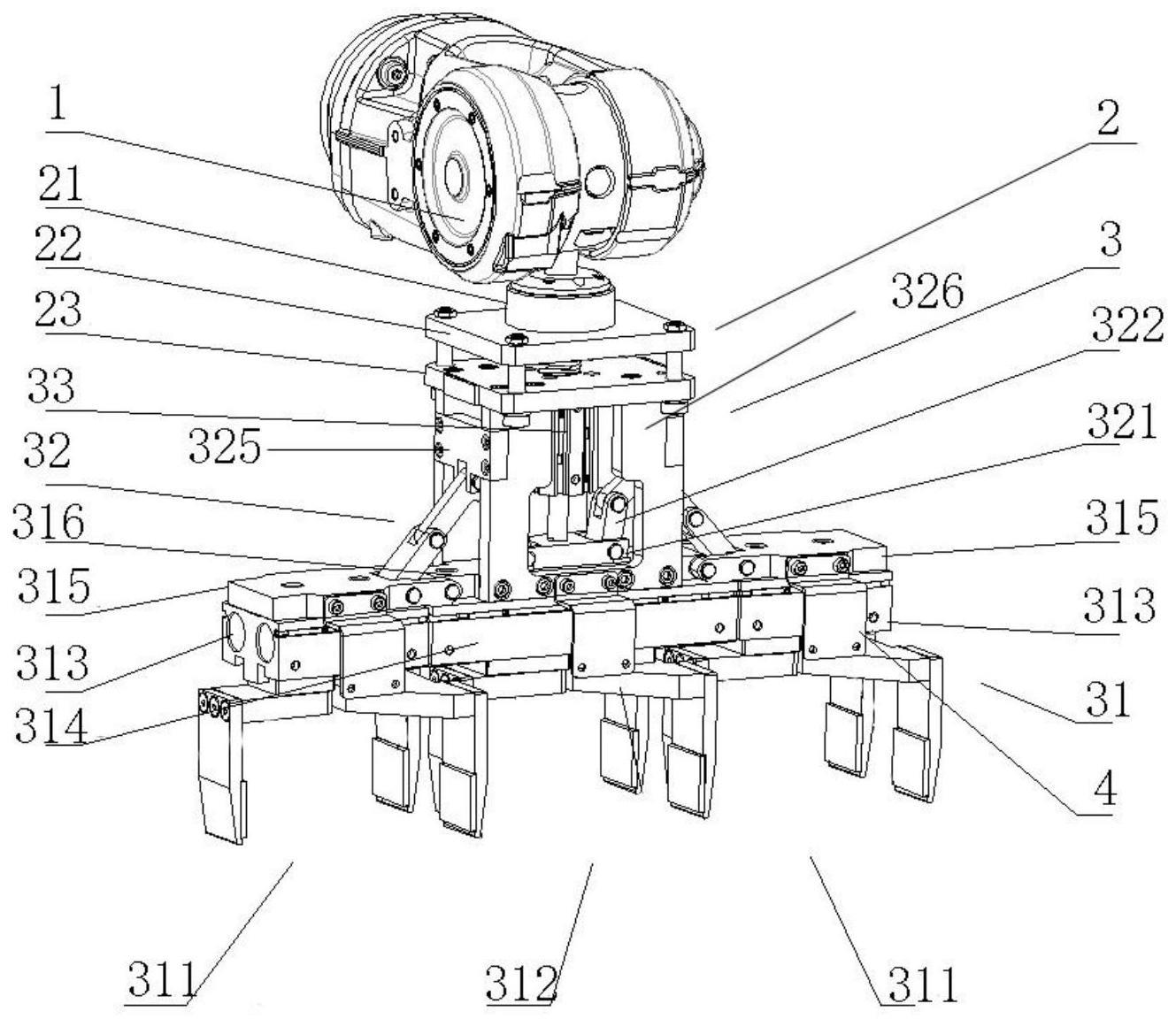
2、技术方案:为实现上述目的,本发明所述的一种用于机器人上下料的单相和三相电能表兼容抓手,包括手臂、与手臂通过安装板结构连接的抓手部件,抓手部件包括夹爪机构、连杆结构、连接气缸,所述夹爪机构包括三相夹爪结构和分别位于三相夹爪结构两侧的单相夹爪结构、用于控制三相夹爪结构和单相夹爪结构运动的三相夹爪气缸和单相夹爪气缸、用于固定三相夹爪气缸和单相夹爪气缸的三相气缸固定板和单相气缸固定板,其中两组单相气缸固定板转动连接在三相气缸固定板的两侧;连杆结构为由多组连杆通过销轴转动连接而成的左右对称结构,连杆结构的两端分别与两组单相气缸固定板转动连接;连杆结构的中部设有连接气缸,并与连接气缸的活塞杆垂直固定连接,连接气缸的底面固定在安装板结构上。
3、所述三相夹爪结构和单相夹爪结构均包括单齿的左夹爪和双齿的右夹爪,分别固定在相应夹爪气缸的左右手指上。
4、所述三相夹爪气缸和单相夹爪气缸均为平行开闭型薄型气爪,其中三相夹爪气缸的最大行程大于单相夹爪气缸。
5、所述连杆结构包括连杆推板以及位于连杆推板两侧并依次转动连接的气缸推板、拐角连杆、长拉杆,所述拐角连杆为倒v字形,中部凸出部分与拐角支架转动连接,拐角支架的两端分别固定在两组立板的同侧凹槽内,两组立板上端固定在安装板结构上,下端分别垂直固定在三相气缸固定板的另外两侧。
6、所述连杆推板位于三相气缸固定板中部上方,且连接气缸的活塞杆垂直固定在连杆推板的上表面。
7、所述长拉杆的另一端与单相气缸固定板转动连接,单相气缸固定板上与长拉杆、三相气缸固定板转动连接的位置在同一侧,且与三相气缸固定板连接位置位于与长拉杆连接位置的外侧。
8、所述安装板结构包括手臂连接板、机器人安装板、连接气缸安装板,所述手臂连接板为圆形面板,上表面固定在手臂上,下表面固定在机器人安装板上表面中心位置,连接气缸安装板四周通过螺栓螺母固定在机器人安装板的下方,且与机器人安装板之间留有间隙并设有压缩弹簧。
9、所述立板上端垂直固定在连接气缸安装板下表面。
10、所述连接气缸的底面垂直固定在连接气缸安装板下表面中心位置,连接气缸为薄型单杆内螺纹双作用气缸。
11、所述抓手部件上还设有三组用于检测电能表在夹爪结构内的光电检测器,光电检测器通过光电支架分别固定在两组单相夹爪气缸固定板的侧边和立板的底部,且三组光电检测器位于同一侧边。
12、有益效果:本发明具有如下优点:1、本发明所述的抓手兼容了单相电能表或三相电能表的上下料工作,根据用户需要选择合适的工作模式,操作简单、使用方便、实用性强,减少了上下料机器人抓手的夹爪数量;2、本发明所述的抓手设有多组光电检测器,检测电能表是否被准确的抓取在夹爪内,提高了机器人抓手抓取电能表的精度和效率;3、本发明所述抓手代替了人工分拣工作,适用于大批量多尺寸电能表的抓取工作,提高了电能表分拣的稳定性与效率。
技术特征:
1.一种用于机器人上下料的单相和三相电能表兼容抓手,包括手臂(1)、与手臂(1)通过安装板结构(2)连接的抓手部件(3),其特征在于:抓手部件(3)包括夹爪机构(31)、连杆结构(32)、连接气缸(33),所述夹爪机构(31)包括三相夹爪结构(312)和分别位于三相夹爪结构(312)两侧的单相夹爪结构(311)、用于控制三相夹爪结构(312)和单相夹爪结构(311)运动的三相夹爪气缸(314)和单相夹爪气缸(313)、用于固定三相夹爪气缸(314)和单相夹爪气缸(313)的三相气缸固定板(316)和单相气缸固定板(315),其中两组单相气缸固定板(315)转动连接在三相气缸固定板(316)的两侧;连杆结构(32)为由多组连杆通过销轴转动连接而成的左右对称结构,连杆结构(32)的两端分别与两组单相气缸固定板(315)转动连接;连杆结构(32)的中部设有连接气缸(33),并与连接气缸(33)的活塞杆垂直固定连接,连接气缸(33)的底面固定在安装板结构(2)上。
2.根据权利要求1所述的用于机器人上下料的单相和三相电能表兼容抓手,其特征在于:三相夹爪结构(312)和单相夹爪结构(311)均包括单齿的左夹爪和双齿的右夹爪,分别固定在相应夹爪气缸的左右手指上。
3.根据权利要求1所述的用于机器人上下料的单相和三相电能表兼容抓手,其特征在于:三相夹爪气缸(314)和单相夹爪气缸(313)均为平行开闭型薄型气爪,其中三相夹爪气缸(314)的最大行程大于单相夹爪气缸(313)。
4.根据权利要求1所述的用于机器人上下料的单相和三相电能表兼容抓手,其特征在于:所述连杆结构(32)包括连杆推板(321)以及位于连杆推板(321)两侧并依次转动连接的气缸推板(322)、拐角连杆(323)、长拉杆(324),所述拐角连杆(323)为倒v字形,中部凸出部分与拐角支架(325)转动连接,拐角支架(325)的两端分别固定在两组立板(326)的同侧凹槽内,两组立板(326)上端固定在安装板结构(2)上,下端分别垂直固定在三相气缸固定板(316)的另外两侧。
5.根据权利要求4所述的用于机器人上下料的单相和三相电能表兼容抓手,其特征在于:所述连杆推板(321)位于三相气缸固定板(316)中部上方,且连接气缸(33)的活塞杆垂直固定在连杆推板(321)的上表面。
6.根据权利要求4所述的用于机器人上下料的单相和三相电能表兼容抓手,其特征在于:所述长拉杆(324)的另一端与单相气缸固定板(315)转动连接,单相气缸固定板(315)上与长拉杆(324)、三相气缸固定板(316)转动连接的位置在同一侧,且与三相气缸固定板(316)连接位置位于与长拉杆(324)连接位置的外侧。
7.根据权利要求4所述的用于机器人上下料的单相和三相电能表兼容抓手,其特征在于:与手臂(1)连接的安装板结构(2)包括手臂连接板(21)、机器人安装板(22)、连接气缸安装板(23),所述手臂连接板(21)为圆形面板,上表面固定在手臂(1)上,下表面固定在机器人安装板(22)上表面中心位置,连接气缸安装板(23)四周通过螺栓螺母固定在机器人安装板(22)的下方,且与机器人安装板(22)之间留有间隙并设有压缩弹簧。
8.根据权利要求7所述的用于机器人上下料的单相和三相电能表兼容抓手,其特征在于:立板(326)上端垂直固定在连接气缸安装板(23)下表面。
9.根据权利要求7所述的用于机器人上下料的单相和三相电能表兼容抓手,其特征在于:连接气缸(33)的底面垂直固定在连接气缸安装板(23)下表面中心位置,连接气缸(33)为薄型单杆内螺纹双作用气缸。
10.根据权利要求1所述的用于机器人上下料的单相和三相电能表兼容抓手,其特征在于:抓手部件(3)上还设有三组用于检测电能表在夹爪结构内的光电检测器,光电检测器通过光电支架(4)分别固定在两组单相夹爪气缸固定板(319)的侧边和立板(326)的底部,且三组光电检测器位于同一侧边。
技术总结
本发明公开了一种用于机器人上下料的单相和三相电能表兼容抓手,包括手臂、与手臂通过安装板结构转动连接的抓手部件,抓手部件包括夹爪机构、连杆结构、连接气缸,夹爪机构包括三相夹爪结构和分别位于三相夹爪结构两侧的单相夹爪结构、三相夹爪气缸、单相夹爪气缸、三相气缸固定板、单相气缸固定板,两组单相气缸固定板转动连接在三相气缸固定板的两侧;连杆结构为由多组连杆通过销轴转动连接而成的左右对称结构,连杆结构的两端分别与两组单相气缸固定板转动连接;连杆结构的中部与连接气缸的活塞杆垂直固定连接,连接气缸的底面固定在安装板结构上。本发明解决了现有技术中机器人抓手不能灵活地兼容不同数量和尺寸电能表上下料操作的问题。
技术研发人员:贺唯聪,陈婧仪,杨广旭,梁祥正,代富全,王帅,张飞宇,王彩云,张明明
受保护的技术使用者:北京南瑞捷鸿科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!