一种非拟人化新型负重外骨骼机器人
本发明涉及机器人,尤其涉及负重外骨骼机器人,可用于军事上所需的高原高负载行军,远距离人工运输等活动,可以增强人体负重能力,提高在一样人体消耗下负重行走的时长。
背景技术:
1、外骨骼机器人是一种以人为主、机械为辅,同时还能穿戴的人机一体化机械装置。操作者穿上它后,不仅具有支撑人体结构和保护人体安全的功能,同时还大大增强了人体的负重力、速度和耐力。
2、面向负重行走的下肢助力外骨骼机器人是外骨骼机器人研究的重要分支,主要用于辅助人体背负重物并远程行走。作为人机一体化的系统,人在其中扮演大脑的角色,利用人的智能来控制机器人的行走,外骨骼准确地判断人的意图并进行跟随运动以提供助力。能够充分发挥人脑强大的处理信息的能力,从而避免类似自主式双足机器人的步态规划和步态稳定性问题,同时又可以提供动力,增强肌体的行走能力和速度,缓解大负重和长时间行走下的疲劳感,扩大人类的运动范围。面向负重行走助力的下肢外骨骼可以作为一个子系统被应用到多种领域,如地震救援系统、单兵作战系统、极地科考系统等。将工具、通讯系统、护具等集于一身,携带比平时更多的装备,使穿戴者走的更远,轻松越过障碍,减少不必要的体能消耗,提高工作效率。
3、目前外骨骼机器人机构设计主要基于拟人化的设计原则分配下肢关节自由度,以非拟人化的设计思想进行的外骨骼机器人设计相对较少。
技术实现思路
1、本发明为解决公知技术中存在的技术问题而提供一种非拟人化新型负重外骨骼机器人,以解决现有技术中存在的问题。
2、为实现本发明目的而采用的技术方案是:
3、一种非拟人化新型负重外骨骼机器人,其特征在于,包括穿戴机架结构、非拟人腿框架结构、电机驱动结构、脚踝穿戴结构。
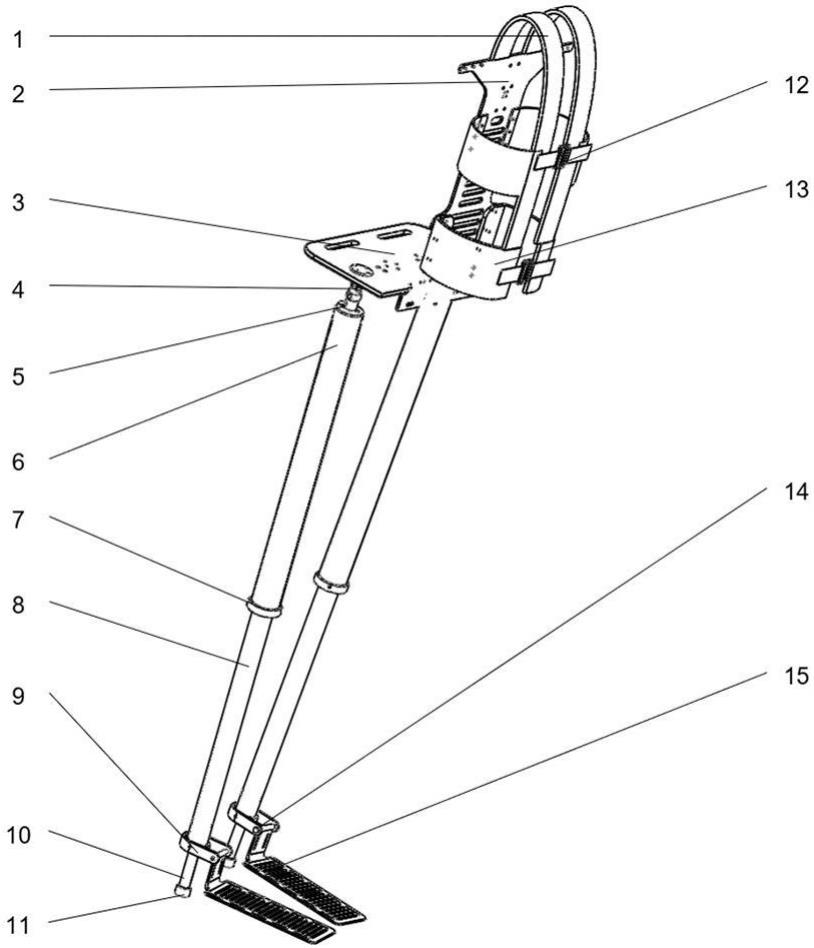
4、按上述技术方案,所述穿戴机架结构包括背板带1、腰板2、底板3、万向联轴器4、传感器上部连接件16、力传感器5、带夹12、腰带13、背板角码17、背部端面连接圆块18,所述背板带1、带夹12、腰带13用于将外骨骼与人体紧紧贴合起来,以实现人体上半身能够较好地穿戴整套外骨骼系统,所述万向联轴器4主要用于保证底板3转动地自由度,避免自由度受限造成人体不适感地产生,所述腰板2、底板3由碳纤维材料制造而成,由所述背板角码17进行连接,以保证承载重物时外骨骼机架地稳定性。
5、按上述技术方案,所述非拟人腿框架结构包括背部端面连接圆块18、万向联轴器4、碳纤维粗管6、大挡块7、碳纤维细管8、底端柱10、橡胶座11,所述碳纤维粗管6、碳纤维细管8用于框架结构的搭建,并且内部的电机驱动结构可以将两者进行一定的连接,以进行重物重力的传递,所述底端柱10、橡胶座11用于电机驱动开合的控制,在橡胶座底部放置薄膜压力传感器,通过检测压力是否产生来判断电机驱动模块是否开始运动。
6、按上述技术方案,所述电机驱动结构包括大尼龙滑块19、电推杆20、细管连接管21、左侧开合合页22、合页转轴23、右侧开合合页24、橡胶异形块25、推动加长杆26,所述大尼龙滑块19用于保证碳纤维细管8在碳纤维粗管6内部运动不发生滑动,所述电推杆20用于实现电机驱动结构的打开和关闭,所述左侧开合合页22、合页转轴23、右侧开合合页24组成一个类似合页机构一样可以开合的装置,开合过程中可使得所述橡胶异形块25与碳纤维粗管6接触产生挤压,所述推动加长杆26用于将电推杆20与合页转轴23连接起来,以便进行合页机构的开合。
7、按上述技术方案,所述脚踝穿戴结构包括小尼龙滑块27、底端柱10、脚踝连接块9、转动铰链轴14、脚底板15,所述小尼龙滑块27用于使得底端柱10可在碳纤维细管8中不晃动,所述脚踝连接块9用于将碳纤维细管8与脚踝连接,所述转动铰链轴14用于实现脚踝运动自由度,所述脚底板15用于安放人体脚掌,其端面开槽处可用于穿过尼龙绑带将人体脚掌固定于脚底板15上,中部开槽为了减轻重量,以保证人体穿戴时整体外骨骼质量的轻便性。
8、按上述技术方案,在综合考虑人体行走各部位的自由度,以及负重行走时人体行走规律后,该负重外骨骼机器人设计的最大亮点在于,所述电机驱动模块可通过左侧开合合页22、右侧开合合页24对橡胶异形块25的挤压使得其与碳纤维粗管6产生足够大的摩擦力,通过该摩擦力可将位于底板3上重物的重力传递至地面,以达到减轻人体负载的作用,所述非拟人腿框架结构由于不存在传统外骨骼机器人的膝关节的设计,并且在设计中也能够实现人体各部分与外骨骼没有干涉,无需设计外骨骼的膝关节也实现了非拟人化的特点,降低了该外骨骼机器人的设计难度和装置质量。
9、相对现有技术,本发明具有以下有益效果:
10、1. 本文针对现有技术目前存在的问题,提出了一种利用非拟人化的思想,并设计出一种能够通过摩擦力以实现在电推杆输出力较低情况下,实现大重量重物负载功能的新型负重外骨骼机器人。
11、2. 本文提出的一种非拟人化新型负重外骨骼机器人,其主要优势在于其利用非拟人化的思想,能够减少对于人体某些关节对于外骨骼设计的束缚,使得外骨骼整体结构更加轻便。
技术特征:
1.一种非拟人化新型负重外骨骼机器人,其特征在于包括穿戴机架结构、非拟人腿框架结构、电机驱动结构、脚踝穿戴结构,所述穿戴机架结构用于外骨骼与人体上半身的穿戴连接以及安置所需要承担的负重,所述非拟人腿框架结构作为整体外骨骼的传递壳体上部与穿戴机架结构相连,下部与脚踝穿戴结构相连。所述电机驱动结构处于非拟人腿框架结构的内部,通过电机驱动内部结构运动,可将重物的重力传导至地面,所述脚踝穿戴结构用于外骨骼腿部壳体与人体脚踝的连接,将外骨骼与人体下半身连接起来。
2.根据权利要求1所述的非拟人化新型负重外骨骼机器人,其特征在于,所述穿戴机架结构包括背板带、腰板、底板、万向联轴器、传感器上部连接件、力传感器、带夹、腰带、背板角码、背部端面连接圆块,所述背板带、带夹、腰带用于将外骨骼与人体紧紧贴合起来,以实现人体上半身能够较好地穿戴整套外骨骼系统,所述万向联轴器主要用于保证底板转动地自由度,避免自由度受限造成人体不适感地产生,所述腰板、底板由碳纤维材料制造而成,由所述背板角码进行连接,以保证承载重物时外骨骼机架地稳定性。
3.根据权利要求1所述的非拟人化新型负重外骨骼机器人,其特征在于,所述非拟人腿框架结构包括背部端面连接圆块、万向联轴器、碳纤维粗管、大挡块、碳纤维细管、底端柱、橡胶座,所述碳纤维粗管、碳纤维细管用于框架结构的搭建,并且内部的电机驱动结构可以将两者进行一定的连接,以进行重物重力的传递,所述底端柱、橡胶座用于电机驱动开合的控制,在橡胶座底部放置薄膜压力传感器,通过检测压力是否产生来判断电机驱动模块是否开始运动。
4.根据权利要求1所述的非拟人化新型负重外骨骼机器人,其特征在于,所述电机驱动结构包括大尼龙滑块、电推杆、细管连接管、左侧开合合页、合页转轴、右侧开合合页、橡胶异形块、推动加长杆,所述大尼龙滑块用于保证碳纤维细管在碳纤维粗管内部运动不发生滑动,所述电推杆用于实现电机驱动结构的打开和关闭,所述左侧开合合页、合页转轴、右侧开合合页组成一个类似合页机构一样可以开合的装置,开合过程中可使得所述橡胶异形块与碳纤维粗管接触产生挤压,所述推动加长杆用于将电推杆与合页转轴连接起来,以便进行合页机构的开合。
5.根据权利要求1所述的非拟人化新型负重外骨骼机器人,其特征在于,所述脚踝穿戴结构包括小尼龙滑块、底端柱、脚踝连接块、转动铰链轴、脚底板,所述小尼龙滑块用于使得底端柱可在碳纤维细管中不晃动,所述脚踝连接块用于将碳纤维细管与脚踝连接,所述转动铰链轴用于实现脚踝运动自由度,所述脚底板用于安放人体脚掌,其端面开槽处可用于穿过尼龙绑带将人体脚掌固定于脚底板上,中部开槽为了减轻重量,以保证人体穿戴时整体外骨骼质量的轻便性。
6.根据权利要求2、3、4、5所述的非拟人化新型负重外骨骼机器人,在综合考虑人体行走各部位的自由度,以及负重行走时人体行走规律后,该负重外骨骼机器人设计的最大亮点在于,所述电机驱动模块可通过左侧开合合页、右侧开合合页对橡胶异形块的挤压使得其与碳纤维粗管产生足够大的摩擦力,通过该摩擦力可将位于底板上重物的重力传递至地面,以达到减轻人体负载的作用,所述非拟人腿框架结构由于不存在传统外骨骼机器人的膝关节的设计,并且在设计中也能够实现人体各部分与外骨骼没有干涉,无需设计外骨骼的膝关节也实现了非拟人化的特点,降低了该外骨骼机器人的设计难度和装置质量。
技术总结
本发明公开了一种非拟人化新型负重外骨骼机器人,包括穿戴机架结构、非拟人腿框架结构、电机驱动结构、脚踝穿戴结构,所述穿戴机架结构用于外骨骼与人体上半身的连接以及承载负重所需的重物,所述非拟人腿框架结构借助万向联轴器与穿戴机架结构相连,非拟人腿框架结构通过铰链结构与脚踝穿戴结构相连。所述电机驱动结构处于非拟人腿框架结构的内部,通过电机驱动内部结构运动,可将重物的重力传导至地面。所述脚踝穿戴结构用于连接非拟人腿框架结构与人体脚踝,将外骨骼与人体下半身连接起来,保证外骨骼整体穿戴的稳定性。该非拟人化新型负重外骨骼机器人通过电机驱动实现一种非拟人化的形式实现负重外骨骼的功能,整体可实现能耗低,单次可用时间长的特点,对于负重外骨骼的研究可提供一种新的参考方向。
技术研发人员:宋智斌,詹毓靖,赵竞夫,侯振民
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!