一种基于协作机器人的多变距可换可调收拉定位装置的制作方法
本发明涉及机械自动化,具体为一种基于协作机器人的多变距可换可调收拉定位装置。
背景技术:
1、摆盘是需要把产品规律的放入规定区域,产品在区域里面实现单个独立收缩张开定位,在工业生产中,零部件产品需要放入固定的铁栏和塑胶栏内摆盘,可能存在各种不同类型的须收缩张紧机构来实现产品的轻松投入再张紧,摆盘需要消耗大量的人力去摆产品,费时费力,现有常用的收拉装置技术主要有几种方式:
2、1、通过气动的方式拉动钢丝收缩,实现产品放入收缩的钢丝内后并张开定位;
3、2、人工手拉钢丝收缩,实现产品单个放入收缩的钢丝内,方式比较传统,也是大量消耗人工人力,且对人工身体健康消耗极大。
技术实现思路
1、本发明的目的是提供一种对产品摆盘的定位钢丝等实现快速收缩,使产品快速投入定位钢丝内实现快速定位的收拉张开的装置,替代传统的人工收拉定位作业方式以及气动收拉等的定位方式装置。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种基于协作机器人的多变距可换可调收拉定位装置,包括:
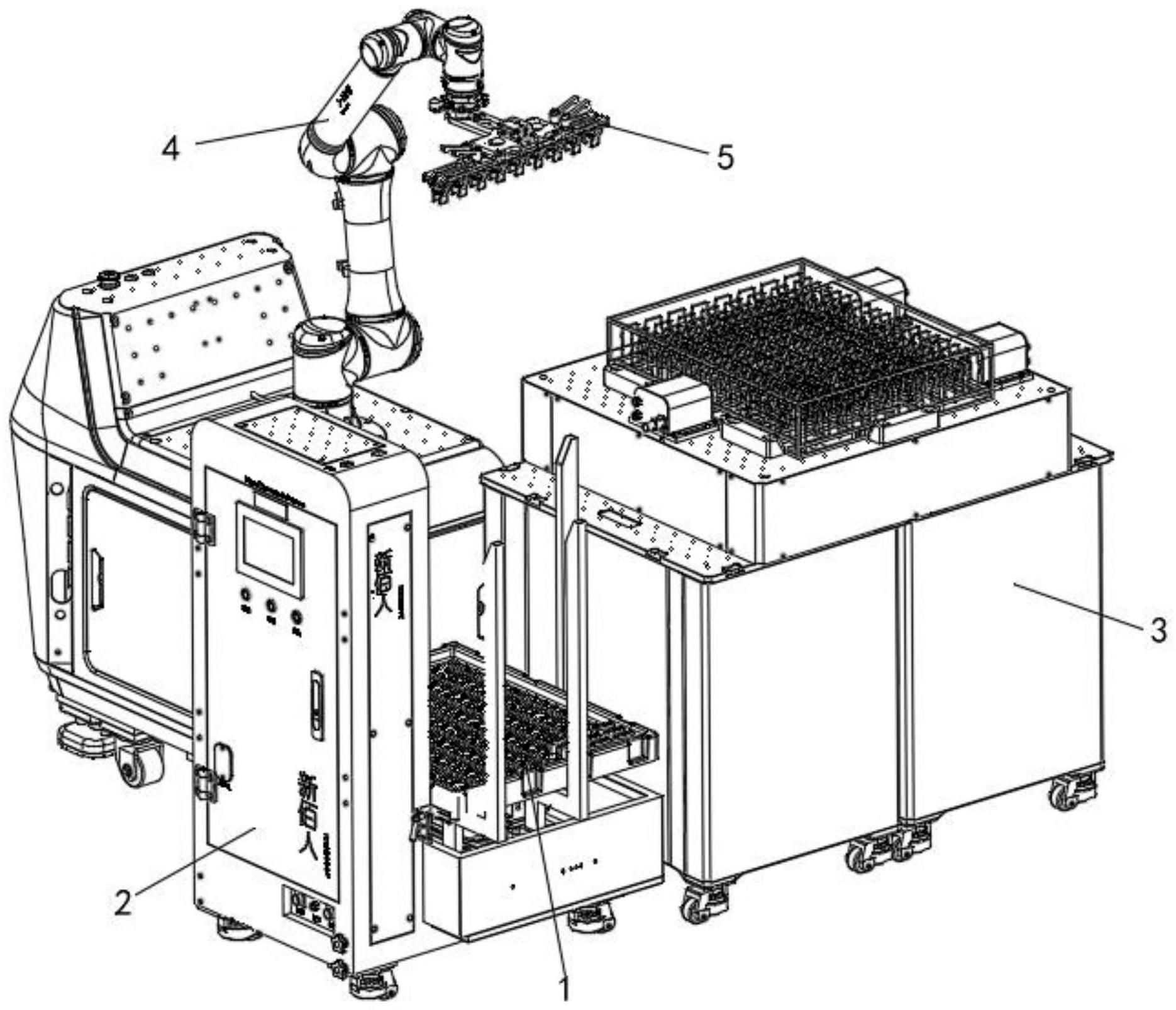
3、供料单元,输送端的上部堆叠有若干层装有待电镀产品的料盘;
4、电镀储料单元,上部固定有作为若干待电镀产品电镀载体的电镀篮,所述电镀篮中设置了若干个产品支撑件,所述电镀储料单元能够让每个产品支撑件发生弹性形变,能够快速且有效的对产品进行固定;
5、协作机器人,位于供料单元、电镀储料单元之间,用于将料盘中的待电镀产品通过夹持的方式摆放至电镀篮中;
6、产品夹具,安装在协作机器人的驱动端,用于夹持待电镀产品。
7、进一步的,所述供料单元包括设备箱以及固定在设备箱前端的料盒,所述料盒的内部固定有用于约束料盘发生横向移动的限位架,所述设备箱的前端面开设有滑孔,所述滑孔的内部滑动设置有升降架,所述设备箱的内部安装有用于驱动升降架上、下移动的升降机构,若干层装有待电镀产品的料盘堆叠在升降架上。
8、进一步的,所述升降机构包括安装在设备箱内部的基座,所述基座的外部安装有升降驱动电机,且基座的内部转动连接有升降传动丝杆,所述升降驱动电机的驱动端安装有主动带轮一,所述升降传动丝杆的端部安装有从动带轮一,所述主动带轮一与从动带轮一之间通过同步带一连接,所述升降传动丝杆的外部螺纹连接有升降座,所述升降座与升降架固定连接。
9、进一步的,所述电镀储料单元包括工作台,所述工作台的顶端安装有外框架,所述外框架的顶端分别安装有若干个用于压住电镀篮防止其发生竖向移动的压篮机构、若干个用于阻止电镀篮发生横向移动的定位导向块,所述定位导向块朝向电镀篮的端面设置为导向面,所述导向面为倾斜面,还安装有用于检测外框架上是否放置电镀篮的光电感应机构。
10、进一步的,所述外框架的内部安装有可变距可换可调模组,且外框架的顶端开设有,所述电镀篮位于的上方,所述可变距可换可调模组的驱动端通过延伸至电镀篮的内部。
11、进一步的,所述压篮机构包括安装在外框架顶端的底板,所述底板的顶端固定有导向块,所述导向块的内部开设有导向孔,所述导向孔的内部滑动设置有驱动板,所述导向块的顶端安装有压篮气缸,所述压篮气缸的驱动端和驱动板的端部之间通过安装板连接,所述驱动板与电镀篮相邻的一端安装有用于压住电镀篮的压篮板,所述底板的上部安装有防护罩一。
12、进一步的,所述光电感应机构包括安装在外框架顶端的传感器安装座,所述传感器安装座的顶端安装有用于检测电镀篮是否被放置在外框架上的接近光电传感器,所述接近光电传感器的外部罩设有防护罩二。
13、进一步的,所述电镀篮包括框架体,若干个能够发生弹性形变的产品支撑件有规律的被固定在框架体上,所述产品支撑件的一端为固定部,另一端为活动部,所述固定部固定在框架体上,所述活动部与框架体不连接。
14、进一步的,所述可变距可换可调模组包括固定在外框架顶端的轴承座、直线导轨一、横移驱动电机,所述轴承座的内部转动连接有横移传动丝杆,所述的外部螺纹连接有滑座,所述滑座滑动设置在直线导轨一上,所述滑座的两侧均安装有升降气缸,所述升降气缸的伸缩端安装有升降板,所述升降板在被升降气缸驱动升降时,通过导向杆进行导向,所述横移传动丝杆的端部安装有从动带轮二,所述横移驱动电机的驱动端安装有主动带轮二,所述从动带轮二与主动带轮二连接有同步带二,所述升降板的顶端安装有直线导轨二,所述直线导轨二的外部滑动连接有可变距滑槽板,所述可变距滑槽板的侧部开设有若干个变距调节孔,所述可变距滑槽板的内部固定有若干个“v”字形的可变距压板,所述变距调节孔与可变距压板对应,所述升降板的侧部安装有压板驱动气缸,所述压板驱动气缸的伸缩端与可变距滑槽板的端部之间通过联动板连接。
15、进一步的,所述产品夹具包括安装在协作机器人驱动端的连接座,所述连接座的内部安装有双头气缸,所述双头气缸的两个伸缩端均安装有夹板活动槽板,每个夹板活动槽板的侧部均开设有若干个夹板间距调节孔,且每个夹板活动槽板的内部均安装有若干个夹板,所述夹板间距调节孔与夹板对应。
16、本发明提供了一种基于协作机器人的多变距可换可调收拉定位装置。与现有技术相比具备以下有益效果:
17、该基于协作机器人的多变距可换可调收拉定位装置,通过机械的方式,来取代现有采用的人工将产品摆放在规定区域的方式,不仅效率高,而且长期来看,成本能够大幅度降低。
技术特征:
1.一种基于协作机器人的多变距可换可调收拉定位装置,其特征在于,包括:
2.根据权利要求1所述的一种基于协作机器人的多变距可换可调收拉定位装置,其特征在于,所述供料单元(2)包括设备箱(21)以及固定在设备箱(21)前端的料盒(22),所述料盒(22)的内部固定有用于约束料盘(1)发生横向移动的限位架(23),所述设备箱(21)的前端面开设有滑孔(24),所述滑孔(24)的内部滑动设置有升降架(25),所述设备箱(21)的内部安装有用于驱动升降架(25)上、下移动的升降机构,若干层装有待电镀产品的料盘(1)堆叠在升降架(25)上。
3.根据权利要求2所述的一种基于协作机器人的多变距可换可调收拉定位装置,其特征在于,所述升降机构包括安装在设备箱(21)内部的基座(26),所述基座(26)的外部安装有升降驱动电机(27),且基座(26)的内部转动连接有升降传动丝杆(28),所述升降驱动电机(27)的驱动端安装有主动带轮一(29),所述升降传动丝杆(28)的端部安装有从动带轮一(210),所述主动带轮一(29)与从动带轮一(210)之间通过同步带一连接,所述升降传动丝杆(28)的外部螺纹连接有升降座(211),所述升降座(211)与升降架(25)固定连接。
4.根据权利要求1所述的一种基于协作机器人的多变距可换可调收拉定位装置,其特征在于,所述电镀储料单元(3)包括工作台(31),所述工作台(31)的顶端安装有外框架(32),所述外框架(32)的顶端分别安装有若干个用于压住电镀篮(35)防止其发生竖向移动的压篮机构(33)、若干个用于阻止电镀篮(35)发生横向移动的定位导向块(34),所述定位导向块(34)朝向电镀篮(35)的端面设置为导向面(341),所述导向面(341)为倾斜面,还安装有用于检测外框架(32)上是否放置电镀篮(35)的光电感应机构(36)。
5.根据权利要求4所述的一种基于协作机器人的多变距可换可调收拉定位装置,其特征在于,所述外框架(32)的内部安装有可变距可换可调模组(37),且外框架(32)的顶端开设有(321),所述电镀篮(35)位于(321)的上方,所述可变距可换可调模组(37)的驱动端通过(321)延伸至电镀篮(35)的内部。
6.根据权利要求4所述的一种基于协作机器人的多变距可换可调收拉定位装置,其特征在于,所述压篮机构(33)包括安装在外框架(32)顶端的底板(331),所述底板(331)的顶端固定有导向块(332),所述导向块(332)的内部开设有导向孔(333),所述导向孔(333)的内部滑动设置有驱动板(336),所述导向块(332)的顶端安装有压篮气缸(334),所述压篮气缸(334)的驱动端和驱动板(336)的端部之间通过安装板(335)连接,所述驱动板(336)与电镀篮(35)相邻的一端安装有用于压住电镀篮(35)的压篮板(337),所述底板(331)的上部安装有防护罩一(338)。
7.根据权利要求4所述的一种基于协作机器人的多变距可换可调收拉定位装置,其特征在于,所述光电感应机构(36)包括安装在外框架(32)顶端的传感器安装座(361),所述传感器安装座(361)的顶端安装有用于检测电镀篮(35)是否被放置在外框架(32)上的接近光电传感器(362),所述接近光电传感器(362)的外部罩设有防护罩二(363)。
8.根据权利要求4所述的一种基于协作机器人的多变距可换可调收拉定位装置,其特征在于,所述电镀篮(35)包括框架体(351),若干个能够发生弹性形变的产品支撑件(352)有规律的被固定在框架体(351)上,所述产品支撑件(352)的一端为固定部(3521),另一端为活动部(3522),所述固定部(3521)固定在框架体(351)上,所述活动部(3522)与框架体(351)不连接。
9.根据权利要求5所述的一种基于协作机器人的多变距可换可调收拉定位装置,其特征在于,所述可变距可换可调模组(37)包括固定在外框架(32)顶端的轴承座(371)、直线导轨一(372)、横移驱动电机(373),所述轴承座(371)的内部转动连接有横移传动丝杆(374),所述(347)的外部螺纹连接有滑座(375),所述滑座(375)滑动设置在直线导轨一(372)上,所述滑座(375)的两侧均安装有升降气缸(376),所述升降气缸(376)的伸缩端安装有升降板(377),所述升降板(377)在被升降气缸(376)驱动升降时,通过导向杆(378)进行导向,所述横移传动丝杆(374)的端部安装有从动带轮二(379),所述横移驱动电机(373)的驱动端安装有主动带轮二(3710),所述从动带轮二(379)与主动带轮二(3710)连接有同步带二,所述升降板(377)的顶端安装有直线导轨二(3711),所述直线导轨二(3711)的外部滑动连接有可变距滑槽板(3712),所述可变距滑槽板(3712)的侧部开设有若干个变距调节孔(3713),所述可变距滑槽板(3712)的内部固定有若干个“v”字形的可变距压板(3714),所述变距调节孔(3713)与可变距压板(3714)对应,所述升降板(377)的侧部安装有压板驱动气缸(3716),所述压板驱动气缸(3716)的伸缩端与可变距滑槽板(3712)的端部之间通过联动板(3715)连接。
10.根据权利要求1所述的一种基于协作机器人的多变距可换可调收拉定位装置,其特征在于,所述产品夹具(5)包括安装在协作机器人(4)驱动端的连接座(51),所述连接座(51)的内部安装有双头气缸(52),所述双头气缸(52)的两个伸缩端均安装有夹板活动槽板(53),每个夹板活动槽板(53)的侧部均开设有若干个夹板间距调节孔(54),且每个夹板活动槽板(53)的内部均安装有若干个夹板(55),所述夹板间距调节孔(54)与夹板(55)对应。
技术总结
本发明公开了一种基于协作机器人的多变距可换可调收拉定位装置,涉及机械自动化技术领域,包括:供料单元,输送端的上部堆叠有若干层装有待电镀产品的料盘;电镀储料单元,上部固定有作为若干待电镀产品电镀载体的电镀篮,电镀储料单元能够让每个产品支撑件发生弹性形变,能够快速且有效的对产品进行固定;协作机器人,位于供料单元、电镀储料单元之间,用于将料盘中的待电镀产品通过夹持的方式摆放至电镀篮中;产品夹具,安装在协作机器人的驱动端,用于夹持待电镀产品。该基于协作机器人的多变距可换可调收拉定位装置,通过机械的方式,来取代现有采用的人工将产品摆放在规定区域的方式,不仅效率高,而且长期来看,成本能够大幅度降低。
技术研发人员:肖景,曾榉嶒,刘财忠
受保护的技术使用者:东莞市新佰人机器人科技有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!