一种六轴机器人的控制方法与流程
本发明涉及非标自动化,尤其涉及一种六轴机器人的控制方法。
背景技术:
1、六轴机器人(robot)是一种具有6个旋转轴的工业机器人,它是一种快速、灵活、高精度的可编程设备,其广泛应用于汽车、电子、医疗、航空、航天等自动化领域,越来越多的自动化项目需要用到六轴机器人。但其操作复杂,编程工作量大,集成难度高让很多的开发人员花费了大量时间去学习,且其稳定性受限于开发人员的熟练程度,很多时候需要专业的机器人厂家提供一对一指导,对项目的开发周期造成一定的影响。
2、以往在可编程逻辑控制器(programmable logic controller,plc)控制机器人的控制方式上,各应用方案多采用硬件输入/输出(input/output,io)连接,即plc端的io信号与机器人端的io信号通过导线相连接,通过控制导线上电流通断实现对机器人的控制。然后编写与各io关联的控制程序,受限于io定义不同,无法做到程序标准化,且编程人员需要详细查阅说明书以了解如何编写机器人功能。
3、通过硬件io连接的方式控制机器人这种方式有如下无法解决的弊端:
4、1.需要连接导线,且导线需要的数量较多。
5、2.导线连接的可靠性较低,当发生断路情况时,机器人可能会执行错误的动作。
6、3.无法传递模拟量信号,在某些应用场景下需要上位机配合才能完成某些功能。
7、4.可扩展性差,受限于硬件io信号的数量。
8、5.控制方法混乱,控制逻辑因人而异,不利于后期维护。
9、6.开发效率低下。
10、因此,本领域的技术人员致力于开发一种六轴机器人的控制方法,以简化机器人的控制方法,标准化机器人的控制逻辑,最大幅度提升机器人项目的开发效率。
技术实现思路
1、有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是如何提供一种六轴机器人的控制方法,以简化机器人的控制方法,标准化机器人的控制逻辑,最大幅度提升机器人项目的开发效率。
2、为实现上述目的,本发明提供了一种六轴机器人的控制方法,所述控制方法基于ethernet/ip总线协议,在上位机和机器人之间通过ethernet/ip总线实现数据通信;在上位机编程前先对使用到的程序外部变量和程序局部变量进行定义;通过上位机对机器人控制功能进行代码编写;在完成机器人控制功能进行代码编写后,将其封装在一个功能块中;在功能块的接口处关联程序外部变量,从而实现机器人控制功能的调用和标准化。
3、进一步地,所述机器人型号为日本电装vs087六轴工业机器人,所述上位机型号为欧姆龙nx-102,使用的编程平台型号为欧姆龙sysmac studio。
4、进一步地,所述机器人控制功能包括机器人启动、机器人复位、机器人停止、机器人模式切换、机器人程序选择、机器人速度设置。
5、进一步地,所述机器人启动,即机器人的使能,指的是机器人从通电到进入励磁使能状态;所述机器人复位指的是当机器人发生故障时,需要执行复位后才能继续运行;所述机器人停止指的是机器人瞬时停止;所述机器人模式切换指的是要使机器人能接收外部指令,需要将机器人的运行模式设定为外部模式;所述机器人程序选择指的是机器人运转程序号选择,用来控制机器人的运动轨迹;所述机器人速度设置包括机器人外部速度、加速度、减速度设置。
6、进一步地,所述机器人控制功能的控制时序为机器人复位、机器人启动、机器人模式切换、机器人速度设置、机器人程序选择、机器人停止。
7、进一步地,所述机器人控制功能包括数据奇偶校验,所述机器人控制功能的控制时序为机器人复位、机器人启动、机器人模式切换、机器人速度设置、机器人程序选择、数据奇偶校验、机器人停止。
8、进一步地,所述数据奇偶校验指的是机器人在接收到上位机发送的数据后,对数据进行校验,并与数据帧的奇偶校验位作对比,以确保数据的完整和准确性。
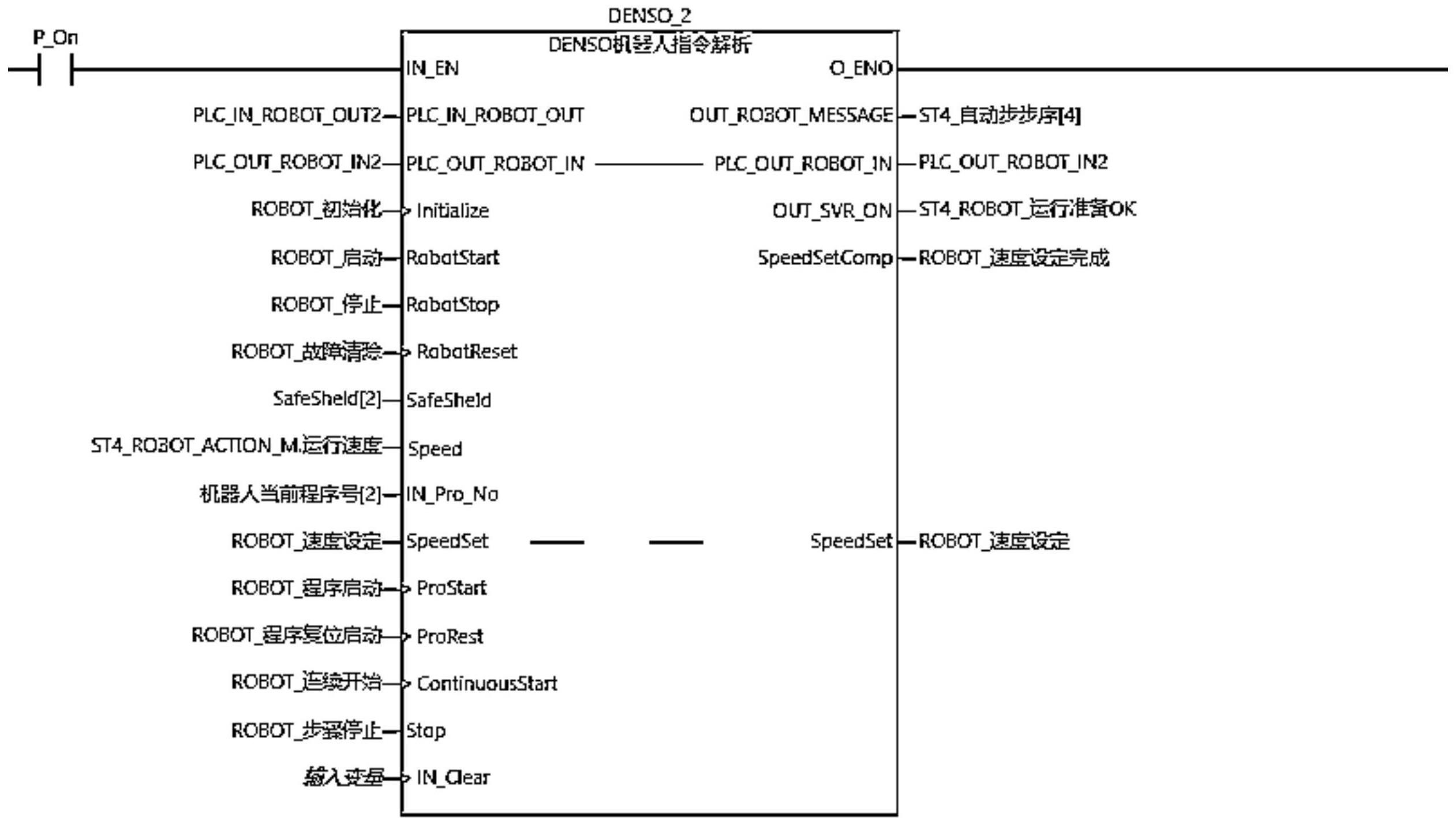
9、进一步地,所述程序外部变量包括功能允许、机器人发送ethernet/ip协议数据帧、上位机发送ethernet/ip协议数据帧、初始化、机器人使能、机器人停止、机器人复位、外围安全门、速度设定值、需要调用的程序号、提示信息、机器人已使能、速度设定指令、速度设定完成、程序启动、程序复位、连续运行、步骤停止、清零。
10、进一步地,所述程序局部变量包括将要调用的程序号、奇偶校验位、时间继电器、机器人步序提示、指令领域、数据领域、模式切换请求、模式切换完成、瞬时停止、故障清除、机器人异常清除请求。
11、进一步地,所述功能块的接口包括功能允许、机器人发送ethernet/ip协议数据帧、上位机发送ethernet/ip协议数据帧、初始化、机器人使能、机器人停止、机器人复位、外围安全门、速度设定值、需要调用的程序号、提示信息、机器人已使能、速度设定指令、速度设定完成、程序启动、程序复位、连续运行、步骤停止、清零。
12、本发明的有益效果在于:
13、本方法在编程时进行结构化设计,模块化封装,经过此方式构建的方法在调试方面具有极高的效率,能快速定位软件运行中的错误原因,大幅提升整体项目的开发效率,降低开发难度。本发明与现有技术相比效率更高,节省人力资源,便于查错,程序开发标准化。
14、以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
技术特征:
1.一种六轴机器人的控制方法,其特征在于,所述控制方法基于ethernet/ip总线协议,在上位机和机器人之间通过ethernet/ip总线实现数据通信;在上位机编程前先对使用到的程序外部变量和程序局部变量进行定义;通过上位机对机器人控制功能进行代码编写;在完成机器人控制功能进行代码编写后,将其封装在一个功能块中;在功能块的接口处关联程序外部变量,从而实现机器人控制功能的调用和标准化。
2.如权利要求1所述的六轴机器人的控制方法,其特征在于,所述机器人型号为日本电装vs087六轴工业机器人,所述上位机型号为欧姆龙nx-102,使用的编程平台型号为欧姆龙sysmac studio。
3.如权利要求1所述的六轴机器人的控制方法,其特征在于,所述机器人控制功能包括机器人启动、机器人复位、机器人停止、机器人模式切换、机器人程序选择、机器人速度设置。
4.如权利要求3所述的六轴机器人的控制方法,其特征在于,所述机器人启动,即机器人的使能,指的是机器人从通电到进入励磁使能状态;所述机器人复位指的是当机器人发生故障时,需要执行复位后才能继续运行;所述机器人停止指的是机器人瞬时停止;所述机器人模式切换指的是要使机器人能接收外部指令,需要将机器人的运行模式设定为外部模式;所述机器人程序选择指的是机器人运转程序号选择,用来控制机器人的运动轨迹;所述机器人速度设置包括机器人外部速度、加速度、减速度设置。
5.如权利要求3所述的六轴机器人的控制方法,其特征在于,所述机器人控制功能的控制时序为机器人复位、机器人启动、机器人模式切换、机器人速度设置、机器人程序选择、机器人停止。
6.如权利要求3所述的六轴机器人的控制方法,其特征在于,所述机器人控制功能包括数据奇偶校验,所述机器人控制功能的控制时序为机器人复位、机器人启动、机器人模式切换、机器人速度设置、机器人程序选择、数据奇偶校验、机器人停止。
7.如权利要求6所述的六轴机器人的控制方法,其特征在于,所述数据奇偶校验指的是机器人在接收到上位机发送的数据后,对数据进行校验,并与数据帧的奇偶校验位作对比,以确保数据的完整和准确性。
8.如权利要求1所述的六轴机器人的控制方法,其特征在于,所述程序外部变量包括功能允许、机器人发送ethernet/ip协议数据帧、上位机发送ethernet/ip协议数据帧、初始化、机器人使能、机器人停止、机器人复位、外围安全门、速度设定值、需要调用的程序号、提示信息、机器人已使能、速度设定指令、速度设定完成、程序启动、程序复位、连续运行、步骤停止、清零。
9.如权利要求1所述的六轴机器人的控制方法,其特征在于,所述程序局部变量包括将要调用的程序号、奇偶校验位、时间继电器、机器人步序提示、指令领域、数据领域、模式切换请求、模式切换完成、瞬时停止、故障清除、机器人异常清除请求。
10.如权利要求8所述的六轴机器人的控制方法,其特征在于,所述功能块的接口包括功能允许、机器人发送ethernet/ip协议数据帧、上位机发送ethernet/ip协议数据帧、初始化、机器人使能、机器人停止、机器人复位、外围安全门、速度设定值、需要调用的程序号、提示信息、机器人已使能、速度设定指令、速度设定完成、程序启动、程序复位、连续运行、步骤停止、清零。
技术总结
本发明公开一种六轴机器人的控制方法,所述控制方法基于Ethernet/IP总线协议,在上位机和机器人之间通过Ethernet/IP总线实现数据通信;在上位机编程前先对使用到的程序外部变量和程序局部变量进行定义;通过上位机对机器人控制功能进行代码编写;在完成机器人控制功能进行代码编写后,将其封装在一个功能块中;在功能块的接口处关联程序外部变量,从而实现机器人控制功能的调用和标准化。本方法在编程时进行结构化设计,模块化封装,经过此方式构建的方法在调试方面具有极高的效率,能快速定位软件运行中的错误原因,大幅提升整体项目的开发效率,降低开发难度。本发明与现有技术相比效率更高,节省人力资源,便于查错,程序开发标准化。
技术研发人员:王肖肖
受保护的技术使用者:苏州华兴欧立通自动化科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!