生成机器人的动作路径的装置、方法以及记录介质与流程
本发明涉及生成机器人的动作路径的装置、方法以及程序。
背景技术:
1、近年来,在fa(factory automation:工厂自动化)领域等中,与人协调动作的机器人的开发正在进行。通常,在使机器人动作之前,预先设定机器人的动作路径。“mohammadsafeea,其他2名,“on-line collision avoidance for collaborative robotmanipulators by adjusting off-line generated paths:an industrial use case”,robotics and autonomous systems,elsevier,2019,119,pp.278-288”公开了通过用户对路径上的全部点进行示教来设定机器人的动作路径。
技术实现思路
1、预先对机器人的路径的全部点进行示教需要花费用户的工夫。另一方面,已知有在机器人的动作中自动地生成路径以避免与周围的物体的干涉的技术(参照“justinasmiseikis,其他3名,“multi 3d camera mapping for predictive and reflexive robotmanipulator trajectory estimation”,2016ieee symposium series on computationalintelligence(ssci)”)。因此,考虑不预先在机器人动作前对机器人的路径的全部点进行示教,而在机器人的动作中自动地生成路径。然而,在该情况下,位于机器人的周围的人难以预测机器人进行怎样的动作。
2、本公开是鉴于上述问题而完成的,其目的在于提供一种削减用户用于机器人动作前的路径设定的工夫,并且容易预测机器人进行怎样的动作的装置、方法以及程序。
3、根据本公开的一例,在机器人动作前生成机器人的动作路径的装置具备生成部和决定部。生成部针对所指定的一个以上的动作区间中的对象动作区间,生成机器人的多个路径候选,提供表示受理从多个路径候选中选择一个路径候选的画面的数据。决定部将该一个路径候选决定为对象动作区间的动作路径。
4、根据该公开,用户在所述画面中,选择对于对象动作区间自动生成的多个路径候选中的一个,由此,能够设定对象动作区间的动作路径。即,用户无需对于对象动作区间中的全部点进行示教。因此,削减用户用于机器人动作前的路径设定的工夫。并且,用户选择多个路径候选中的一个作为动作路径,因此容易在机器人动作前预测机器人的动作。
5、在上述公开中,生成部使用表示在配置机器人的空间中物体所占有的区域的占有区域信息,以不与物体干涉的方式生成多个路径候选。根据该公开,以不与物体干涉的方式生成路径候选。
6、在上述公开中,生成部例如只要使用概率性方法来生成多个路径候选即可。
7、在上述公开中,生成部对多个路径候选分别进行评价。上述的画面包含针对多个路径候选的评价结果。评价结果例如表示关于多个路径候选各自的移动距离、移动时间及与物体干涉的风险的程度中的至少一方。
8、根据该公开,用户通过参考评价结果,容易选择多个路径候选中的一个。
9、在上述公开中,一个以上的动作区间包含第1动作区间~第n动作区间。n为2以上的整数。装置还具备设定部,该设定部设定第1动作区间~第n动作区间分别属于第1组和第2组中的哪一个。设定部将第1动作区间~第n动作区间中的属于第1组的各动作区间设定为对象动作区间。决定部针对第1动作区间~第n动作区间中的属于第2组的各动作区间,基于所指定的示教数据来决定机器人的动作路径。决定部将依次连接针对第1动作区间~第n动作区间决定的动作路径而得到的路径决定为从第1动作区间的开始点到第n动作区间的结束点的整体路径。根据该公开,用户能够针对每个动作区间来设定动作路径。
10、在上述公开中,装置还具备使机器人沿着整体路径动作的控制部。设定部还设定第1动作区间~第n动作区间分别属于第3组和第4组中的哪一个。控制部能够控制机器人进行用于避免与机器人周围的物体干涉的干涉避免动作。控制部在使机器人沿着与第1动作区间~第n动作区间中的属于第3组的各动作区间对应的动作路径进行动作的情况下,使干涉避免动作有效。控制部在使机器人沿着与第1动作区间~第n动作区间中的属于第4组的各动作区间对应的动作路径进行动作的情况下,使干涉避免动作无效。
11、根据该公开,用户例如能够将需要精密动作(例如插入或按压等)的动作区间设定为第4组。由此,能够防止在机器人进行精密的动作的期间意外地执行干涉避免动作。
12、在上述公开中,干涉避免动作包含远离动态物体的动作。控制部对动作中的机器人与机器人周围的静态物体干涉的风险进行评价。控制部响应于该风险超过预先确定的基准的情况,使机器人停止。
13、根据该公开,即便因远离动态物体的动作而导致机器人与静态物体的距离变短,也可避免静态物体与机器人的干涉。
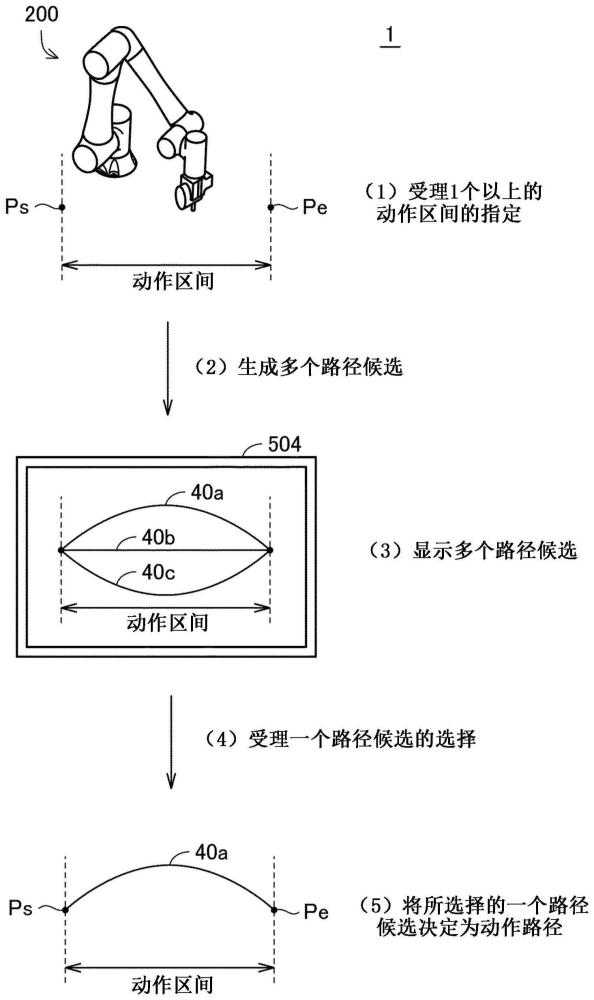
14、根据本公开的一例,在机器人动作前生成机器人的动作路径的方法包含第1步骤~第5步骤。第1步骤是受理一个以上的动作区间的指定的步骤。第2步骤是针对一个以上的动作区间中的对象动作区间,生成机器人的多个路径候选的步骤。第3步骤是在用户界面上显示多个路径候选的步骤。第4步骤是受理从多个路径候选中选择一个路径候选的步骤。第5步骤是将一个路径候选决定为对象动作区间的动作路径的步骤。
15、根据本公开的一例,程序使计算机执行在机器人动作前生成所述机器人的动作路径的方法。该方法包含以下步骤:受理一个以上的动作区间的指定;针对一个以上的动作区间中的对象动作区间,生成机器人的多个路径候选;提供表示受理从多个路径候选中选择一个路径候选的画面的数据;以及将一个路径候选决定为所述对象动作区间的动作路径。
16、根据这些公开,容易削减用户用于机器人动作前的路径设定的工夫,并且容易预测机器人进行何种动作。
17、本发明的上述以及其他目的、特征、方面以及优点根据与附图相关联地理解的本发明的以下的详细说明而变得明确。
技术特征:
1.一种在机器人动作前生成所述机器人的动作路径的装置,所述装置具备:
2.根据权利要求1所述的装置,其中,
3.根据权利要求1或2所述的装置,其中,
4.根据权利要求1所述的装置,其中,
5.根据权利要求4所述的装置,其中,
6.根据权利要求1所述的装置,其中,
7.根据权利要求6所述的装置,其中,
8.根据权利要求7所述的装置,其中,
9.一种在机器人动作前生成所述机器人的动作路径的方法,其具备以下步骤:
10.一种存储有程序的记录介质,所述程序使计算机执行在机器人动作前生成所述机器人的动作路径的方法,所述方法包含以下步骤:
技术总结
本发明提供生成机器人的动作路径的装置、方法以及记录介质,削减用户用于机器人动作前的路径设定的工夫,并且容易预测机器人进行怎样的动作。方法包含以下步骤:受理一个以上的动作区间的指定;针对一个以上的动作区间中的对象动作区间,生成机器人的多个路径候选;将多个路径候选显示于用户界面;受理从多个路径候选中选择一个路径候选;以及将一个路径候选决定为对象动作区间的动作路径。
技术研发人员:大城笃志
受保护的技术使用者:欧姆龙株式会社
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!