机器人的控制方法、装置、存储介质及机器人与流程
本公开涉及终端,具体地,涉及一种机器人的控制方法、装置、存储介质及机器人。
背景技术:
1、随着人工智能的快速发展,机器人开始广泛地应用在人们的日常生活中。机器人运动学包括正向运动学和逆向运动学,正向运动学即给定机器人各关节变量,计算机器人末端的位置姿态,逆向运动学即已知机器人末端的位置姿态,计算机器人对应位置的关节变量。然而,使用正向运动学难以按照末端目标位置计算全臂控制数据,而使用逆向运动学难以有效控制全臂单个关节姿态,无法对机器人进行灵活控制。
技术实现思路
1、本公开的目的是提供一种机器人的控制方法、装置、存储介质及机器人,用于提高控制机器人的灵活度。
2、根据本公开实施例的第一方面,提供一种机器人的控制方法,所述方法包括:
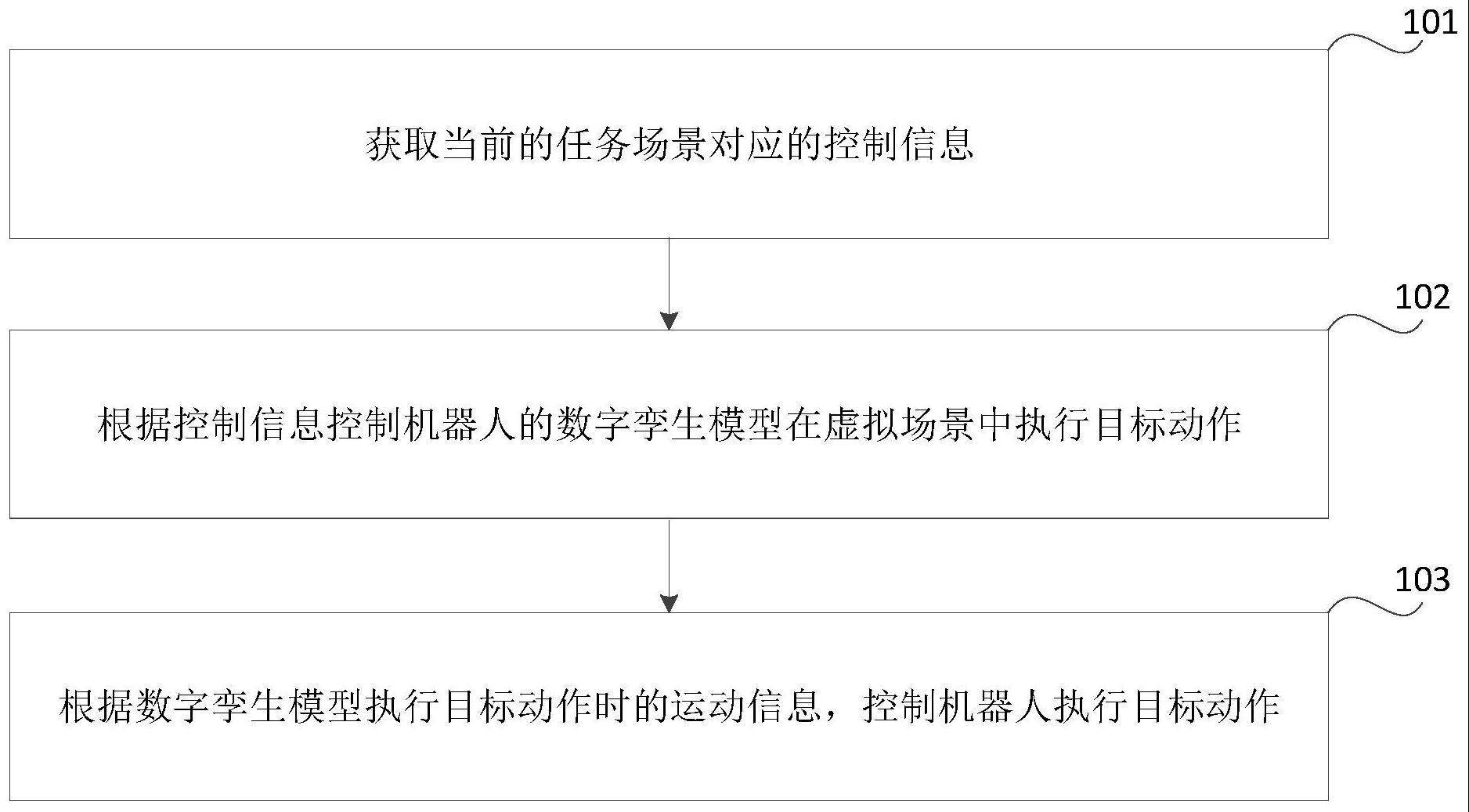
3、获取当前的任务场景对应的控制信息,所述控制信息包括正向运动学控制和逆向运动学控制的控制顺序,以及正向运动学控制对应的第一控制信息和逆向运动学控制对应的第二控制信息;
4、根据所述控制信息控制机器人的数字孪生模型在虚拟场景中执行目标动作;
5、根据所述数字孪生模型执行所述目标动作时的运动信息,控制所述机器人执行所述目标动作。
6、可选地,所述获取当前的任务场景对应的控制信息包括:
7、获取所述任务场景对应的任务类别;
8、获取所述任务场景的环境信息;
9、根据所述任务类别和所述环境信息确定所述控制信息。
10、可选地,所述根据所述控制信息控制机器人的数字孪生模型在虚拟场景中执行目标动作包括:
11、按照所述控制顺序、所述第一控制信息和所述第二控制信息,控制所述数字孪生模型在虚拟场景中执行所述目标动作。
12、可选地,所述第一控制信息包括所述数字孪生模型的第一目标关节的第一目标角度;所述第二控制信息包括所述数字孪生模型的目标控制点的目标位置;所述按照所述控制顺序、所述第一控制信息和所述第二控制信息,控制所述数字孪生模型在虚拟场景中执行所述目标动作包括:
13、按照所述控制顺序和所述第一控制信息,控制所述第一目标关节在虚拟场景中旋转至所述第一目标角度;
14、按照所述控制顺序和所述第二控制信息,控制所述目标控制点在虚拟场景中移动至所述目标位置。
15、可选地,所述按照所述控制顺序和所述第二控制信息,控制所述目标控制点在虚拟场景中移动至所述目标位置包括:
16、根据所述目标位置确定所述数字孪生模型的第二目标关节的第二目标角度;
17、控制所述第二目标关节旋转至所述第二目标角度,以使所述目标控制点到达所述目标位置。
18、可选地,所述运动信息包括所述数字孪生模型的每个关节的角度信息;所述根据所述数字孪生模型执行所述目标动作时的运动信息,控制所述机器人执行所述目标动作包括:
19、按照预设频率采集所述数字孪生模型在执行所述目标动作时每个关节的角度信息;
20、根据所述角度信息控制所述机器人,以使所述机器人执行所述目标动作。
21、根据本公开实施例的第二方面,提供一种机器人的控制装置,所述装置包括:
22、获取模块,被配置为获取当前的任务场景对应的控制信息,所述控制信息包括正向运动学控制和逆向运动学控制的控制顺序,以及正向运动学控制对应的第一控制信息和逆向运动学控制对应的第二控制信息;
23、第一控制模块,被配置为根据所述控制信息控制机器人的数字孪生模型在虚拟场景中执行目标动作;
24、第二控制模块,被配置为根据所述数字孪生模型执行所述目标动作时的运动信息,控制所述机器人执行所述目标动作。
25、可选地,所述获取模块被配置为:
26、获取所述任务场景对应的任务类别;
27、获取所述任务场景的环境信息;
28、根据所述任务类别和所述环境信息确定所述控制信息。
29、可选地,所述第一控制模块被配置为:
30、按照所述控制顺序、所述第一控制信息和所述第二控制信息,控制所述数字孪生模型在虚拟场景中执行所述目标动作。
31、可选地,所述第一控制信息包括所述数字孪生模型的第一目标关节的第一目标角度;所述第二控制信息包括所述数字孪生模型的目标控制点的目标位置;所述第一控制模块包括:
32、第一控制子模块,被配置为按照所述控制顺序和所述第一控制信息,控制所述第一目标关节在虚拟场景中旋转至所述第一目标角度;
33、第二控制子模块,被配置为按照所述控制顺序和所述第二控制信息,控制所述目标控制点在虚拟场景中移动至所述目标位置。
34、可选地,所述第二控制子模块被配置为:
35、根据所述目标位置确定所述数字孪生模型的第二目标关节的第二目标角度;
36、控制所述第二目标关节旋转至所述第二目标角度,以使所述目标控制点到达所述目标位置。
37、可选地,所述运动信息包括所述数字孪生模型的每个关节的角度信息;所述第二控制模块包括:
38、采集子模块,被配置为按照预设频率采集所述数字孪生模型在执行所述目标动作时每个关节的角度信息;
39、第三控制子模块,被配置为根据所述角度信息控制所述机器人,以使所述机器人执行所述目标动作。
40、根据本公开实施例的第三方面,提供一种非临时性计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现本公开第一方面所述方法的步骤。
41、根据本公开实施例的第四方面,提供一种机器人,包括:
42、存储器,其上存储有计算机程序;
43、处理器,用于执行所述存储器中的所述计算机程序,以实现本公开第一方面所述方法的步骤。
44、通过上述技术方案,本公开首先获取当前的任务场景对应的控制信息,其中,控制信息包括正向运动学控制和逆向运动学控制的控制顺序,以及正向运动学控制对应的第一控制信息和逆向运动学控制对应的第二控制信息。然后根据控制信息控制机器人的数字孪生模型在虚拟场景中执行目标动作,并根据数字孪生模型执行目标动作时的运动信息,控制机器人执行目标动作。本公开结合正向运动学和逆向运动学的控制方法来控制机器人,能够更加灵活、精确地对机器人进行控制。
45、本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种机器人的控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述获取当前的任务场景对应的控制信息包括:
3.根据权利要求1所述的方法,其特征在于,所述根据所述控制信息控制机器人的数字孪生模型在虚拟场景中执行目标动作包括:
4.根据权利要求3所述的方法,其特征在于,所述第一控制信息包括所述数字孪生模型的第一目标关节的第一目标角度;所述第二控制信息包括所述数字孪生模型的目标控制点的目标位置;所述按照所述控制顺序、所述第一控制信息和所述第二控制信息,控制所述数字孪生模型在虚拟场景中执行所述目标动作包括:
5.根据权利要求4所述的方法,其特征在于,所述按照所述控制顺序和所述第二控制信息,控制所述目标控制点在虚拟场景中移动至所述目标位置包括:
6.根据权利要求1至5中任一项所述的方法,其特征在于,所述运动信息包括所述数字孪生模型的每个关节的角度信息;所述根据所述数字孪生模型执行所述目标动作时的运动信息,控制所述机器人执行所述目标动作包括:
7.一种机器人的控制装置,其特征在于,所述装置包括:
8.根据权利要求7所述的装置,其特征在于,所述获取模块被配置为:
9.一种非临时性计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1-6中任一项所述方法的步骤。
10.一种机器人,其特征在于,包括:
技术总结
本公开涉及一种机器人的控制方法、装置、存储介质及机器人,涉及终端控制领域,该方法包括:获取当前的任务场景对应的控制信息,控制信息包括正向运动学控制和逆向运动学控制的控制顺序,以及正向运动学控制对应的第一控制信息和逆向运动学控制对应的第二控制信息。根据控制信息控制机器人的数字孪生模型在虚拟场景中执行目标动作。根据数字孪生模型执行目标动作时的运动信息,控制机器人执行目标动作。本公开结合正向运动学和逆向运动学的控制方法来控制机器人,能够更加灵活、精确地对机器人进行控制。
技术研发人员:王秋林
受保护的技术使用者:达闼机器人股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!