单兵便携式人机协同急救机器人的制作方法
本发明涉及急救机器人,具体涉及单兵便携式人机协同急救机器人。
背景技术:
1、急救机器人是一种救援型机器人,当有任何意外或疾病发生时,施救者在医护人员到达前,按医学护理的原则,利用现场适用物资临时及适当地为伤病者进行的初步救援及护理,然后从速送往医院,其中通过急救机器人可辅助施救者对患者进行护理。
2、目前,现有的急救机器人在应用中,不仅可实现单兵携带移动,且可在远程医疗操控下实现人机协同作业,但是其在实际使用时,当处于户外等较为恶劣的环境下,地面缺少摆放医疗工具及药品的条件,而单兵便携式急救机器人的体积大小有限,难以作为摆台使用,施救者需要将物品从机器人储物仓中不断的拿取和放置,费时费力,导致施救护理不方便,大大影响了装置的使用效果。
3、因此,发明单兵便携式人机协同急救机器人来解决上述问题很有必要。
技术实现思路
1、本发明的目的是提供单兵便携式人机协同急救机器人,通过在机器人本体上设置支撑件,且在转动机构的配合下,可将支撑板由竖直状态转至水平状态,且支撑件包括支撑板、第一伸缩板和第二伸缩板,并在驱动组件和限位组件的作用下,可使第二伸缩板和第一伸缩板依次伸出,从而可将支撑件拉长展开形成体积较大的摆台,以便放置各种医疗工具及药品,方便施救护理,且不用时可再次收缩折叠,大大提高了装置的使用效果,以解决技术中的上述不足之处。
2、为了实现上述目的,本发明提供如下技术方案:单兵便携式人机协同急救机器人,包括:
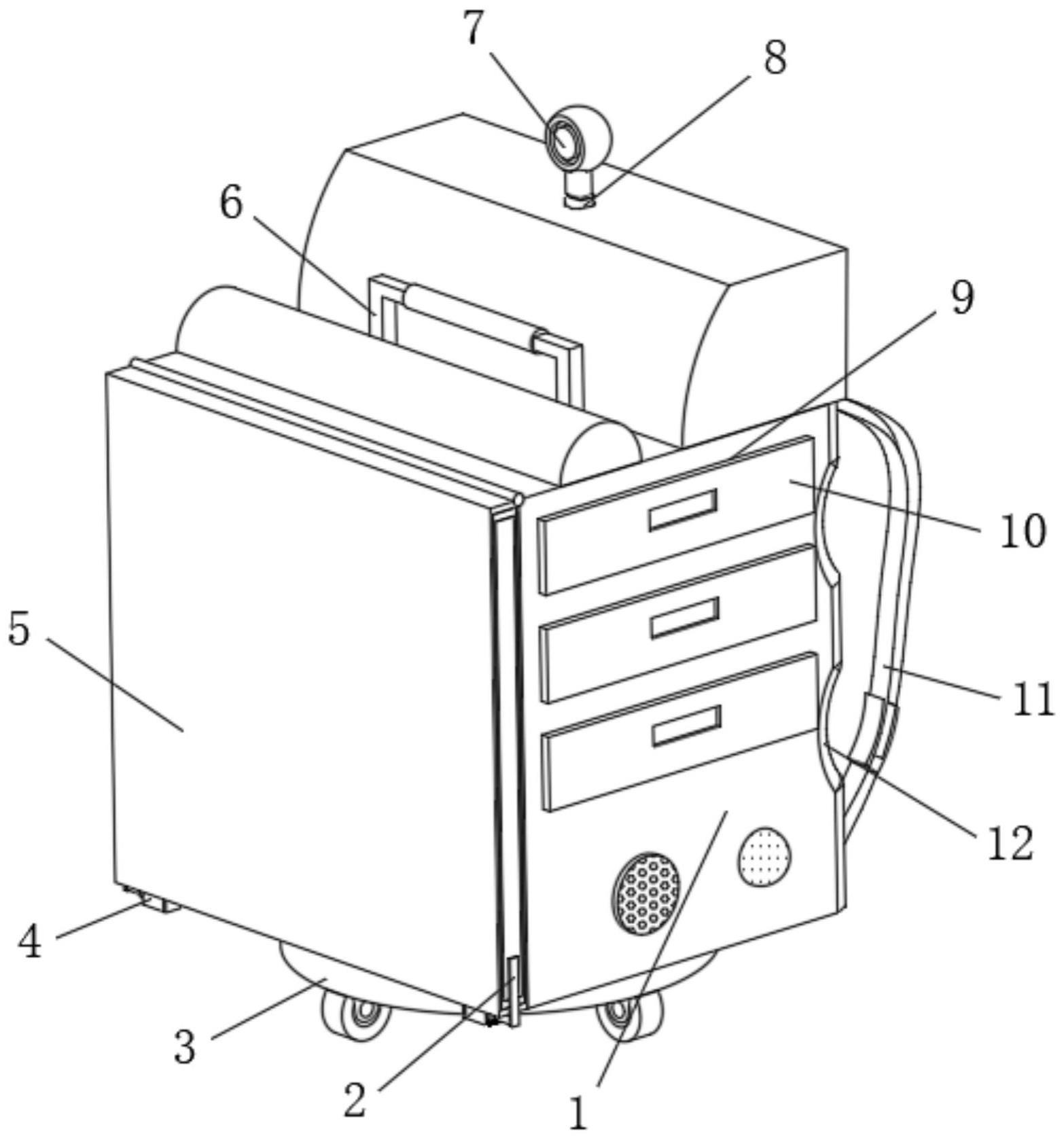
3、机器人本体,所述机器人本体的顶部安装有摄像组件,且机器人本体的内部底端设置有控制单元,所述机器人本体的一侧连接有背带,且机器人本体的另一侧设置有支撑件;
4、对称开设于机器人本体两侧的多个储物仓,且储物仓内设有电动抽屉,所述机器人本体的底部安装有移动底盘;
5、所述支撑件包括转动安装于机器人本体顶端侧壁的支撑板,所述支撑板的两侧对称设置有可滑动的第一伸缩板,且第一伸缩板的一侧设有可滑动的第二伸缩板,所述支撑板的底部两端均安装有驱动组件,且驱动组件与第二伸缩板连接;
6、转动机构,所述转动机构用于驱动支撑板旋转。
7、优选的,所述支撑件还包括限位组件,所述限位组件包括对称设置于第一伸缩板和第二伸缩板两端的限位块,且支撑板和第一伸缩板的内壁两侧均开设有与限位块相适配的限位槽。
8、优选的,所述第二伸缩板的内侧开设有收纳槽,所述收纳槽的内部一端通过转轴转动连接有固定柱,所述固定柱的端部开设有螺纹槽,所述螺纹槽内旋合连接有螺柱,且螺柱的一端延伸至螺纹槽外、并设置有脚垫。
9、优选的,所述脚垫相对于螺柱的一端开设有定位孔,且收纳槽的内部一端连接有与定位孔相匹配的定位头。
10、优选的,所述摄像组件包括安装于机器人本体顶侧的第一电机,且第一电机的输出端连接有摄像头。
11、优选的,所述控制单元包括蓄电池和pcb板,且pcb板上设有控制处理器与无线收发器。
12、优选的,所述驱动组件包括气缸,所述气缸的输出端设置有连接条,且连接条与第二伸缩板固定连接。
13、优选的,所述转动机构包括开设于机器人本体侧壁朝向支撑板的凹槽,所述凹槽的内部转动安装有丝杆,所述丝杆的一端设置有第二电机,且丝杆的外壁套设有螺套,所述螺套与支撑板之间转动连接有连杆。
14、优选的,所述机器人本体位于背带的一侧设置有缓冲垫,且缓冲垫的侧壁设有弧形槽。
15、优选的,所述机器人本体的顶部设置有把手。
16、在上述技术方案中,本发明提供的技术效果和优点:
17、一是,通过在机器人本体上设置支撑件,且在转动机构的配合下,可将支撑板由竖直状态转至水平状态,且支撑件包括支撑板、第一伸缩板和第二伸缩板,并在驱动组件和限位组件的作用下,可使第二伸缩板和第一伸缩板依次伸出,从而可将支撑件拉长展开形成体积较大的摆台,以便放置各种医疗工具及药品,方便施救护理,且不用时可再次收缩折叠,大大提高了装置的使用效果。
18、二是,通过在第二伸缩板上设置收纳槽、固定柱和脚垫,可在支撑件拉长展开形成摆台后,使固定柱转动移出并抵在地面,从而可进一步的对摆台进行支撑加固,以稳定重心,进而防止了装置发生倾翻,大大提高了安全性。
19、三是,通过在固定柱与脚垫之间增设螺柱和螺纹槽,从而可调节固定柱与脚垫之间的距离,使得脚垫能够更好的适应抵压在凹凸不平的路面上,大大提高了装置的适用性。
20、四是,通过设置定位头和定位孔,可在固定柱收起放入收纳槽内后,使定位孔与定位头相互插接,从而可将固定柱固定在收纳槽内,以防止其随意脱落,且反向转动即可解除固定,使用简单便捷。
技术特征:
1.单兵便携式人机协同急救机器人,其特征在于,包括:
2.根据权利要求1所述的单兵便携式人机协同急救机器人,其特征在于:所述支撑件(5)还包括限位组件,所述限位组件包括对称设置于第一伸缩板(52)和第二伸缩板(53)两端的限位块(20),且支撑板(51)和第一伸缩板(52)的内壁两侧均开设有与限位块(20)相适配的限位槽(21)。
3.根据权利要求1所述的单兵便携式人机协同急救机器人,其特征在于:所述第二伸缩板(53)的内侧开设有收纳槽(18),所述收纳槽(18)的内部一端通过转轴转动连接有固定柱(19),所述固定柱(19)的端部开设有螺纹槽(24),所述螺纹槽(24)内旋合连接有螺柱(22),且螺柱(22)的一端延伸至螺纹槽(24)外、并设置有脚垫(23)。
4.根据权利要求3所述的单兵便携式人机协同急救机器人,其特征在于:所述脚垫(23)相对于螺柱(22)的一端开设有定位孔(25),且收纳槽(18)的内部一端连接有与定位孔(25)相匹配的定位头(26)。
5.根据权利要求1所述的单兵便携式人机协同急救机器人,其特征在于:所述摄像组件包括安装于机器人本体(1)顶侧的第一电机(8),且第一电机(8)的输出端连接有摄像头(7)。
6.根据权利要求1所述的单兵便携式人机协同急救机器人,其特征在于:所述控制单元包括蓄电池(27)和pcb板,且pcb板上设有控制处理器(28)与无线收发器(29)。
7.根据权利要求1所述的单兵便携式人机协同急救机器人,其特征在于:所述驱动组件包括气缸(4),所述气缸(4)的输出端设置有连接条(2),且连接条(2)与第二伸缩板(53)固定连接。
8.根据权利要求1所述的单兵便携式人机协同急救机器人,其特征在于:所述转动机构包括开设于机器人本体(1)侧壁朝向支撑板(51)的凹槽(13),所述凹槽(13)的内部转动安装有丝杆(15),所述丝杆(15)的一端设置有第二电机(17),且丝杆(15)的外壁套设有螺套(16),所述螺套(16)与支撑板(51)之间转动连接有连杆(14)。
9.根据权利要求1所述的单兵便携式人机协同急救机器人,其特征在于:所述机器人本体(1)位于背带(11)的一侧设置有缓冲垫(12),且缓冲垫(12)的侧壁设有弧形槽。
10.根据权利要求1所述的单兵便携式人机协同急救机器人,其特征在于:所述机器人本体(1)的顶部设置有把手(6)。
技术总结
本发明公开了单兵便携式人机协同急救机器人,具体涉及急救机器人技术领域,包括:机器人本体,所述机器人本体的顶部安装有摄像组件,且机器人本体的内部底端设置有控制单元,所述机器人本体的一侧连接有背带,且机器人本体的另一侧设置有支撑件。本发明通过在机器人本体上设置支撑件,且在转动机构的配合下,可将支撑板由竖直状态转至水平状态,且支撑件包括支撑板、第一伸缩板和第二伸缩板,并在驱动组件和限位组件的作用下,可使第二伸缩板和第一伸缩板依次伸出,从而可将支撑件拉长展开形成体积较大的摆台,以便放置各种医疗工具及药品,方便施救护理,且不用时可再次收缩折叠,大大提高了装置的使用效果。
技术研发人员:朱海燕,王亚南,马唯一,黄晶晶,牟宏磊,蒙洋,王烁石,田磊,刘晶晶,张勇,姜鹏举
受保护的技术使用者:中国人民解放军总医院第一医学中心
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!