一种基于改进的SKF和EKF的联邦学习算法的故障巡检机器人
本发明涉及故障巡检领域,尤其是涉及一种基于改进的skf和ekf的联邦学习算法的故障巡检机器人。
背景技术:
1、当前在管道气体微泄漏检测方面,主要采用的方法包括气体浓度检测法、红外检测法和声波法等。然而,这些主流的管道气体检测技术存在以下缺陷和不足:
2、气体浓度检测法的分辨率受限,导致检测速度较慢,且仅能识别较小的区域;
3、红外检测法容易受到环境温度和湿度的影响,同时障碍物会干扰成像效果;
4、声波法需要存在压差,并且测试距离通常限制在小于100米;
5、传统的管道气体微泄漏检测技术通常仅采用单一传感器进行检测,导致检测效率低、容易受环境干扰,且对测试环境要求较高。
6、因此,现有技术对于高效、准确、稳定地进行管道气体微泄漏检测仍存在一定的局限性和不足之处。
技术实现思路
1、本发明的目的是提供一种基于改进的skf和ekf的联邦学习算法的故障巡检机器人,实现对气体管道微小泄漏的准确识别,通过优化算法和算法参数调整,进一步提高识别准确度并降低误判率。
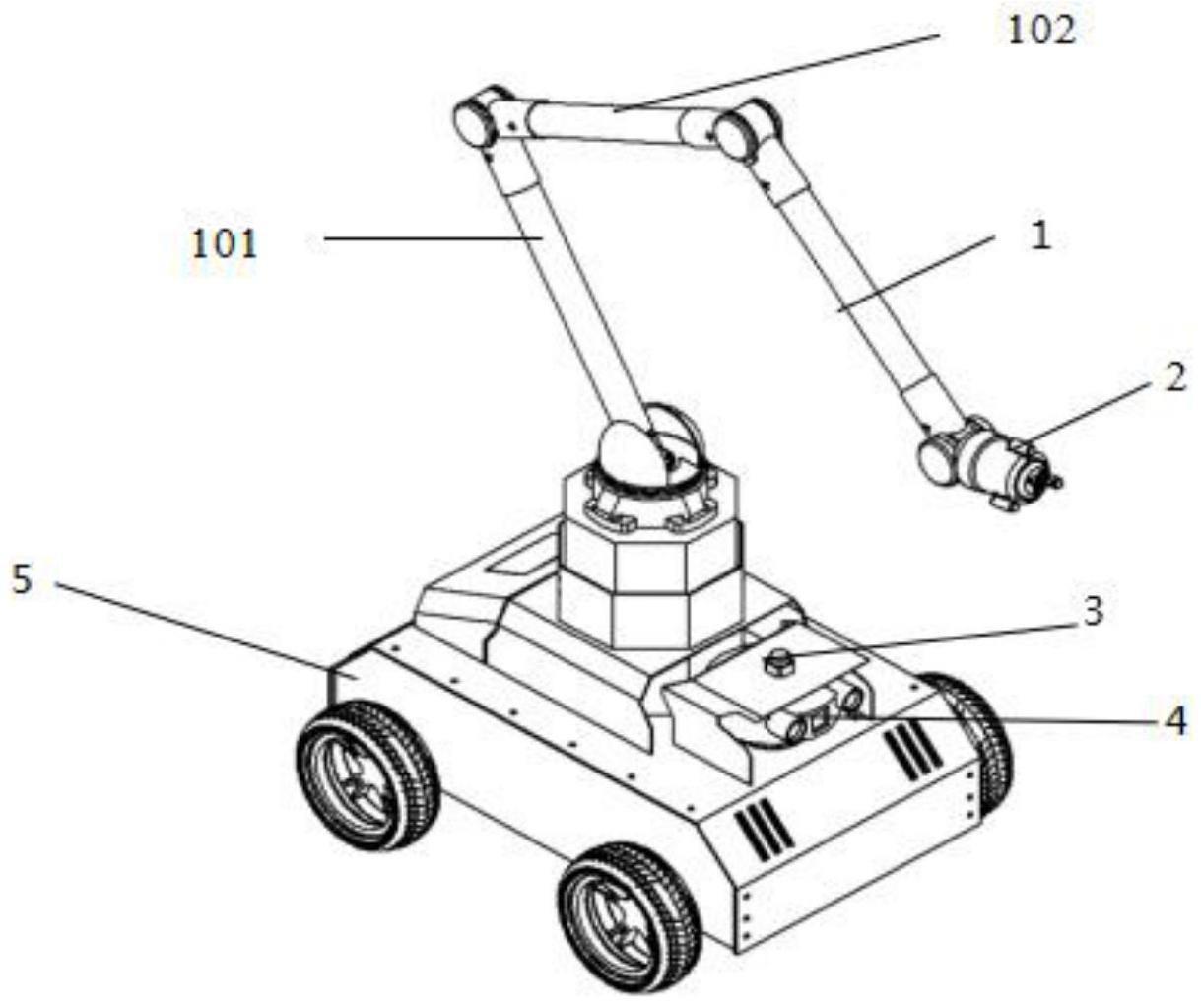
2、为实现上述目的,本发明提供了一种基于改进的skf和ekf的联邦学习算法的故障巡检机器人,包括机械臂和小车底盘,所述机械臂设置在所述小车底盘上,所述小车底盘的顶部设置有激光雷达和摄像头,所述机械臂包括第一机械臂、第二机械臂和第三机械臂,所述第二机械臂设置在所述第一机械臂与所述第三机械臂之间,所述第一机械臂远离所述第二机械臂的一端与电动推杆连接,所述电动推杆的另一端与设置在所述小车底盘内部的电机驱动器连接,所述小车底盘内部靠近所述电机驱动器的一侧顶部设置有雨量传感器和控制主板,所述雨量传感器与所述控制主板连接,所述小车底盘内部侧壁设置有惯性导航传感器和gps传感器,所述小车底盘的底部设置有四个驱动轮。
3、优选的,所述第一机械臂远离所述第二机械臂的一端设置有伺服舵机,所述第三机械臂远离所述第二机械臂的一端设置有管道泄漏检测头,所述管道泄漏检测头包括气体传感器、红外热成像仪和麦克风传感器,所述气体传感器、所述红外热成像仪和所述麦克风传感器均与数据处理模块连接。
4、优选的,所述小车底盘内部远离所述电机驱动器的一端设置有锂电池和温湿度传感器,靠近所述温湿度传感器一侧的所述小车底盘外侧设置有显示屏。
5、一种基于改进的skf和ekf的联邦学习算法的故障巡检机器人,包括以下步骤:
6、s1:客户端解码从联邦中心共享全局模型;
7、s2:客户端根据上述解码信息,通过扩展卡尔曼滤波器ekf更新本地客户端网络参数;
8、s3:将本地私有数据转换为公开传输的网络参数信息;
9、s4:在网络传输过程中,客户端获取联邦中心的观测值;
10、s5:将更新的模型参数上传至联邦中心;
11、s6:联邦中心建立基于序贯卡尔曼滤波skf的序贯融合滤波方法,对上传的客户端网络参数进行异步融合。
12、优选的,在步骤s3中,对于第i个客户端,第(k-1)到第k个周期中得到不等间隔r(i)标记的样本对为:
13、
14、其中,表示样本对;是第i个样本的特征向量和标签;
15、基于前k-1周期从联邦中心获得的网络参数估计值和相应的估计误差协方差,建立ekf的网络参数状态模型,利用随机游走思想建立状态模型和测量模型,其中状态模型为:
16、
17、测量模型为:
18、
19、其中为状态变量,a为状态转移矩阵,为测量变量,ω(k)为状态噪声,网络参数函数为f(d(k),a(k+1)),参数α=[ωt,bt,βt]t为变量状态噪声ω(k)和输出噪声v(k)是高斯白噪声,ω表示输入层和隐藏层的链路权值;β表示隐含层雨输出层的链路权值,b表示隐藏层偏差;
20、
21、构造的ekf为:
22、
23、式中为第(k-1)到第k个周期样本状态下的预测观测函数;
24、
25、得到的状态预测值如下:
26、
27、预测协方差矩阵如下:
28、pi(k|k-1)=api(k-1|k-1)at+qi(k-1)
29、其中为状态变量的先验估计值,pi(k|k-1)为先验误差协方差,qi(k-1)为ω(k)状态噪声的协方差矩阵;
30、扩展卡尔曼滤波最优增益矩阵ki(k)为
31、ki(k)=pi(k|k-1)ht[hpi(k|k-1)ht+ri(k)]-1
32、式中,r为观测噪声的协方差矩阵;ht为观测函数h的雅可比矩阵;
33、预测状态下的非线性观测函数的雅可比矩阵是:
34、
35、协方差的更新估计为:
36、pi(k|k)=[i-ki(k)hi]pi(k|k-1)
37、其中pi(k|k)为误差协方差矩阵,ki(k)为增益矩阵;
38、根据测量和模型得到第k个周期的网络参如下所示,并发送给联邦中心;
39、
40、其中,表示客户端的网络参数;表示客户端网络参数的测量值;表示联邦中心参数的估计值。
41、优选的,在步骤s6中,使用skf异步更新联邦中心全局网络参数,建立符合卡尔曼滤波的状态模型如下:
42、
43、测量模型为:
44、其中,为系统中无法通过观测直接得到的待估计状态;为传感器采集的数量序列,间接反应的值;a为系统的一步状态转移矩阵;hi为测量矩阵;ωi为系统噪声序列;vi为测量噪声序列;k表示网络参数更新的周期,k∈z,参数更新值为skf为:
45、
46、完成第(k-1)到第k个周期的网络参数更新后,得到
47、优选的,基于skf算法的全球网络参数的异步更新,包括以下步骤:
48、s61:时间更新;
49、s62:测量更新。
50、优选的,在步骤s61中,具体包括以下步骤:
51、1)根据和a,得到
52、2)根据ph(k|k)和q(k-1),得到ph(k|k-1)。ph(k|k-1)=ap(k-1|k-1)at+q(k-1);
53、针对第一个客户,获得以下信息:
54、
55、
56、p1(k|k)=[in-k1(k)h1]p(k|k-1)
57、在步骤s62中,具体包括以下步骤:
58、1)根据和实际观测值与预测观测值之间的残差,得到如下所示的顺序卡尔曼滤波器:
59、2)根据pi(k|k)和测量值信息,得出增益矩阵为:
60、
61、其中,q为系统噪声方差矩阵;r为测量噪声方差矩阵;
62、3)计算误差协方差矩阵pi(k|k)=[in-ki(k)hi]pi-1(k|k),得到以下结果:
63、
64、p(k|k)=pn(k|k)
65、因此,本发明采用上述一种基于改进的skf和ekf的联邦学习算法的故障巡检机器人,具备以下有益效果:
66、(1)本发明采用多个维度探测气体管道泄漏的方法,通过综合分析声音特征、温度特征和气体浓度特征三个维度,实现对气体管道微小泄漏的准确识别。通过优化算法和算法参数调整,进一步提高识别准确度和降低误判率
67、(2)本发明引入改进的skf和ekf算法的联邦学习异步实时更新模式,实现对客户端网络参数的实时估计和更新;通过优化算法的性能和模型的学习能力,提高故障诊断的精度和准确率。
68、(3)本发明装置采用三段机械臂结构,由三段关节和臂内伸缩杆组成,适应化工管道复杂排布的环境作业需求,具备更高的灵活性和适应性;通过优化机械臂的结构设计和材料选用,提高机械臂的运动灵活性和精确性,进一步增强装置的检测任务执行能力。
69、(4)本发明装置设计了30个传感器来感知环境,包括摄像头、超声波测距传感器、激光雷达传感器、光学编码器、在线电流传感器、雨量传感器、温湿度传感器、惯性导航传感器、gps传感器和uwb超宽带定位传感器等。通过优化传感器的布局和数据融合算法,提高对气体泄漏的多维度预估和检测能力。
70、(5)本发明前置摄像头和超声测距传感器,用于视觉避障和化工管道目标的识别;这些传感器的使用增强了装置的感知能力,提高了工作环境下的安全性和准确性。
71、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!