一种可调整手指分布方式的具有指尖的柔性手爪
本发明涉及机器手爪,特指一种可调整手指分布方式的具有指尖的柔性手爪。
背景技术:
1、物体抓取是机器人操作的基础,在生活和生产场景中,机器人需要处理各种类型、尺寸和形状的物体。
2、在真实场景中,机器人需要根据不同形状、大小的物体,呈现不同的姿态以实现对不同形状的物体进行抓取。
3、详细地说,对于圆柱形或长条状物体,手爪需要平行并且相对分布,而对于圆形或球形物体,手爪需要呈圆周分布以实现全方位包裹物体;现有的机器人手爪是通过多个舵机,对应驱动不同的手爪实现姿态调整,但是,由于包括多个舵机,单独对应地实现姿态调整,在使用的时候,需要通过不同的舵机的多次调整,才能实现姿态调整的效果。
4、而且,现有的机器人手爪往往无法处理细小的物体,例如绣花针、胶囊、螺丝钉等。
5、基于此,亟需一种柔性手爪,能及时调整多个手爪,而且能抓取不同形状的物体。
技术实现思路
1、本发明的发明目的在于:为了解决现有技术中所存在的问题,本发明提供了一种可调整手指分布方式的具有指尖的柔性手爪。
2、为了解决现有技术中所存在的问题,本发明采用以下技术方案:
3、一种可调整手指分布方式的具有指尖的柔性手爪,包括有驱动装置和多个柔性手爪单元,多个所述柔性手爪单元与所述驱动装置相连接,每个所述柔性手爪单元包括有多个依次连接的连接体,连接在首端的所述连接体与所述驱动装置相连接,连接在末端的所述连接体上设置有指尖结构;
4、多个依次连接的连接体包括有依次交替连接的硬质指骨和柔性关节;
5、所述驱动装置包括有第一驱动机构和第二驱动机构,所述第一驱动机构用于整体控制多个所述柔性手爪单元的姿态转换;
6、所述第二驱动机构包括有多个第二舵机,多个所述第二舵机与多个所述柔性手爪单元意一一对应连接,所述第二驱动机构用于调整所述柔性手爪单元的弯曲姿态。
7、作为本发明可调整手指分布式的具有指尖的柔性手爪的技术方案的一种改进,所述第一驱动机构包括有第一舵机,所述第一舵机与主动齿轮相连接,所述主动齿轮相啮合有从动齿轮,所述从动齿轮上设置有多个手指固定座,所述手指固定座的数量与所述柔性手爪单元的数量一一对应,且所述柔性手爪单元设置在所述手指固定座上。
8、作为本发明可调整手指分布式的具有指尖的柔性手爪的技术方案的一种改进,所述第二驱动机构包括有多个所述第二舵机,每个所述第二舵机对应有舵盘和驱动绳,所述第二舵机与所述舵盘相连接,所述驱动绳的第一端固定在所述舵盘上,所述驱动绳的第二端与所述柔性手爪单元相连接。
9、作为本发明可调整手指分布式的具有指尖的柔性手爪的技术方案的一种改进,所述驱动绳的第二端穿设在所述柔性手爪单元中;所述柔性手爪单元的姿态随着所述驱动绳的松紧调整变化。
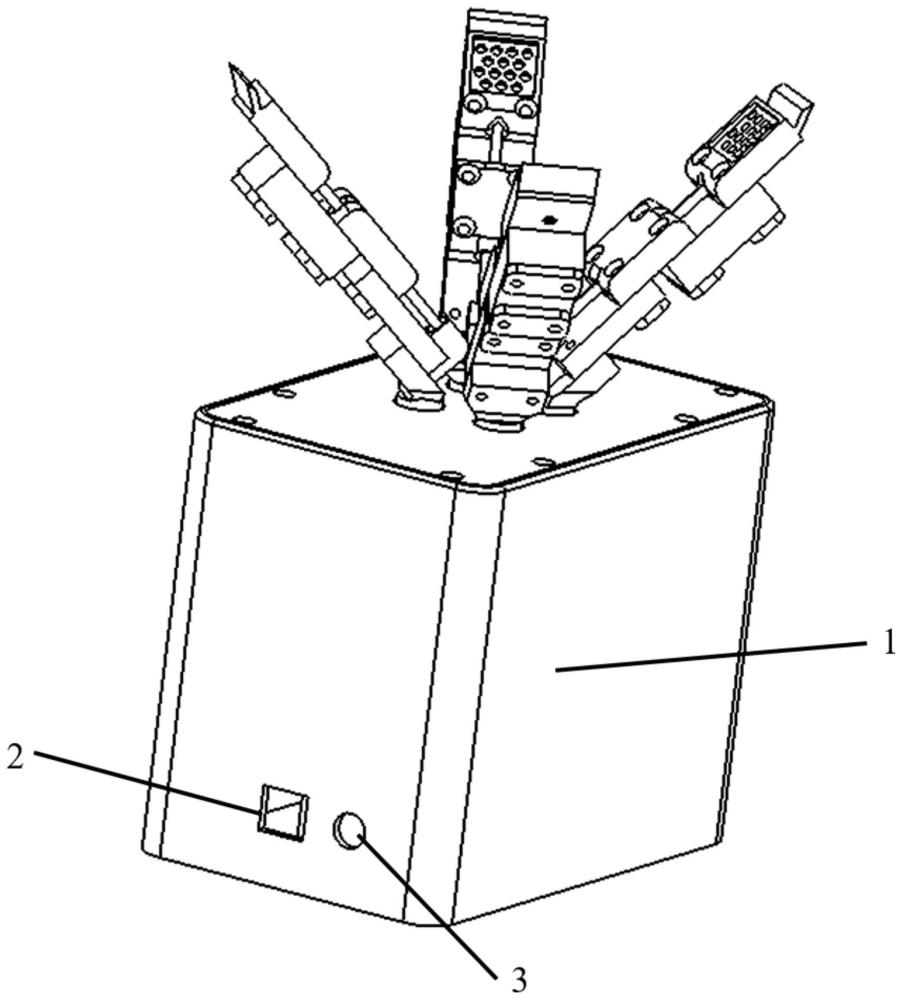
10、作为本发明可调整手指分布式的具有指尖的柔性手爪的技术方案的一种改进,所述可调整手指分布方式的具有指尖的柔性手爪包括有壳体,所述壳体包括底座外壳,所述驱动装置设置在所述底座外壳中。
11、作为本发明可调整手指分布式的具有指尖的柔性手爪的技术方案的一种改进,所述底座外壳内设置有所述驱动电路板,所述驱动电路板分别与所述第一驱动机构和所述第二驱动机构相连接。
12、作为本发明可调整手指分布式的具有指尖的柔性手爪的技术方案的一种改进,每个所述柔性手爪单元包括有依次连接的第一硬质指骨、第一柔性关节、第二硬质指骨、第三柔性关节和第三硬质指骨。
13、作为本发明可调整手指分布式的具有指尖的柔性手爪的技术方案的一种改进,所述柔性关节的刚度与所述柔性关节的尺寸的关系满足:
14、
15、其中,w为所述柔性关节的宽度,d为所述柔性关节的厚度,l为所述柔性关节的长度,e为所述柔性关节的材料的杨氏模量为材质的固有参数。
16、作为本发明可调整手指分布式的具有指尖的柔性手爪的技术方案的一种改进,所述第一柔性关节的刚度为k1,所述第二柔性关节的刚度为k2;
17、当k1>k2时,第一柔性关节的运动幅度小于第二柔性关节的运动幅度;
18、当k1=k2时,第一柔性关节的运动幅度等于第二柔性关节的运动幅度;
19、当k1<k2时,第一柔性关节的运动幅度大于第二柔性关节的运动幅度。
20、本发明的有益效果:
21、在本发明中,根据所要夹取的物体的形状,通过第一驱动机构的调整,整体控制多个柔性手爪单元的姿态转换,使多个柔性手爪单元能够实现同时转动的效果,以实现调整柔性手爪的分布方式。当调整了柔性手爪的分布方式后,可以根据所要夹取的物体的大小,通过第二驱动机构控制柔性手爪单元,使多个柔性手爪单元相互配合,实现夹取物体的效果,这样,解决了现有技术中所存在的问题,即,现有的机器人手爪是通过多个舵机,对应驱动不同的手爪实现姿态调整,但是,由于包括多个舵机,单独对应地实现姿态调整,在使用的时候,需要通过不同的舵机的多次调整,才能实现姿态调整的效果的问题。
技术特征:
1.一种可调整手指分布方式的具有指尖的柔性手爪,包括有驱动装置和多个柔性手爪单元,多个所述柔性手爪单元与所述驱动装置相连接,其特征在于,
2.根据权利要求1所述的可调整手指分布方式的具有指尖的柔性手爪,其特征在于,所述第一驱动机构包括有第一舵机,所述第一舵机与主动齿轮相连接,所述主动齿轮相啮合有从动齿轮,所述从动齿轮上设置有多个手指固定座,所述手指固定座的数量与所述柔性手爪单元的数量一一对应,且所述柔性手爪单元设置在所述手指固定座上。
3.根据权利要求1所述的可调整手指分布方式的具有指尖的柔性手爪,其特征在于,所述第二驱动机构包括有多个所述第二舵机,每个所述第二舵机对应有舵盘和驱动绳,所述第二舵机与所述舵盘相连接,所述驱动绳的第一端固定在所述舵盘上,所述驱动绳的第二端与所述柔性手爪单元相连接。
4.根据权利要求3所述的可调整手指分布方式的具有指尖的柔性手爪,其特征在于,所述驱动绳的第二端穿设在所述柔性手爪单元中;所述柔性手爪单元的姿态随着所述驱动绳的松紧调整变化。
5.根据权利要求1所述的可调整手指分布方式的具有指尖的柔性手爪,其特征在于,所述可调整手指分布方式的具有指尖的柔性手爪包括有壳体,所述壳体包括底座外壳,所述驱动装置设置在所述底座外壳中。
6.根据权利要求5所述的可调整手指分布方式的具有指尖的柔性手爪,其特征在于,所述底座外壳内设置有所述驱动电路板,所述驱动电路板分别与所述第一驱动机构和所述第二驱动机构相连接。
7.根据权利要求1所述的可调整手指分布式的具有指尖的柔性手爪,其特征在于,每个所述柔性手爪单元包括有依次连接的第一硬质指骨、第一柔性关节、第二硬质指骨、第三柔性关节和第三硬质指骨。
8.根据权利要求1或7所述的可调整手指分布式的具有指尖的柔性手爪,其特征在于,所述柔性关节的刚度与所述柔性关节的尺寸的关系满足:
9.根据权利要求8所述的可调整手指分布式的具有指尖的柔性手爪,其特征在于,所述第一柔性关节的刚度为k1,所述第二柔性关节的刚度为k2;
技术总结
本发明涉及机器手爪技术领域,特指一种可调整手指分布方式的具有指尖的柔性手爪。在本发明中,根据所要夹取的物体的形状,通过第一驱动机构的调整,整体控制多个柔性手爪单元的姿态转换,使多个柔性手爪单元能够实现同时转动的效果,以实现调整柔性手爪的分布方式。当调整了柔性手爪的分布方式后,可以根据所要夹取的物体的大小,通过第二驱动机构控制柔性手爪单元,使多个柔性手爪单元相互配合,实现夹取物体的效果,这样,解决了现有技术中所存在的问题,即,现有的机器人手爪是通过多个舵机,对应驱动不同的手爪实现姿态调整,但是,由于包括多个舵机,单独对应地实现姿态调整,在使用的时候,需要通过不同的舵机的多次调整,才能实现姿态调整的效果的问题。
技术研发人员:仵沛宸,高杨,崔国伟,陈小平
受保护的技术使用者:广东省科学院智能制造研究所
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!