一种工业机器人用机械手爪
本发明涉及工业机械手,特别涉及一种工业机器人用机械手爪。
背景技术:
1、工业生产中采用工业机器人及其机械手爪拿取物料,可以提高物料拿取时的稳定性,机械手爪广泛用于药品、食品、化工以及汽车制造等行业,其中,汽车轮毂制作过程中,由于其重量较大,通常需要采用机械手将其拿取至指定位置,既可以节省轮毂的搬运时间,也可以提高轮毂的生产效率。
2、公开号为cn214394198u的中国实用新型专利提供了关于轮毂拿取的技术方案,其公开了一种侧轮毂生产加工用的机械手,其主要通过多组齿轮之间的联动控制两个第一螺纹座相对滑动,进而带动机械手相对移动对侧轮毂初次夹持,再通过第二夹持块上的圆形限位块与扭簧的配合对侧轮毂二次夹持,实现了对侧轮毂的夹持。
3、但是上述专利还存在以下问题:由于侧轮毂的侧壁为光滑的表面,因此机械手夹持侧轮毂时其与侧轮毂之间的摩擦力较小,因此侧轮毂缺乏稳定性,容易滑落,此外,机械手和圆形限位块与侧轮毂直接接触,容易对侧轮毂的表面造成划痕等缺陷。
4、另外,公开号为cn111633453a的中国发明专利申请也提供了关于轮毂拿取的技术方案,其公开了一种汽车轮毂生产用的上下料机械手及控制系统,首先通过钩爪的端部勾住轮辐的底面对其底面进行限位,然后通过绑带对轮辐的上表面进行限位,绑带与钩爪配合实现了对轮毂的固定,且通过驱动轮和传动轮的减速传动能够驱动卷绕辊旋转,从而对绑带进行收放,以控制绑带对轮毂的束缚。
5、但是上述专利还存在以下问题:该专利通过对轮辐的固定以对整个轮毂进行固定,但是钩爪和绑带对轮辐固定的位置无法得到校准,当钩爪和绑带对轮辐的不同位置进行固定时,无法确保轮毂的平衡性,容易导致轮毂发生倾斜,进而轮毂缺乏稳定性,此外,该专利需要采用多个驱动才能实现对轮辐的固定,整体效率较低,且成本较高。
技术实现思路
1、一、要解决的技术问题:本发明提供的一种工业机器人用机械手爪,可以解决上述背景技术中指出的难题。
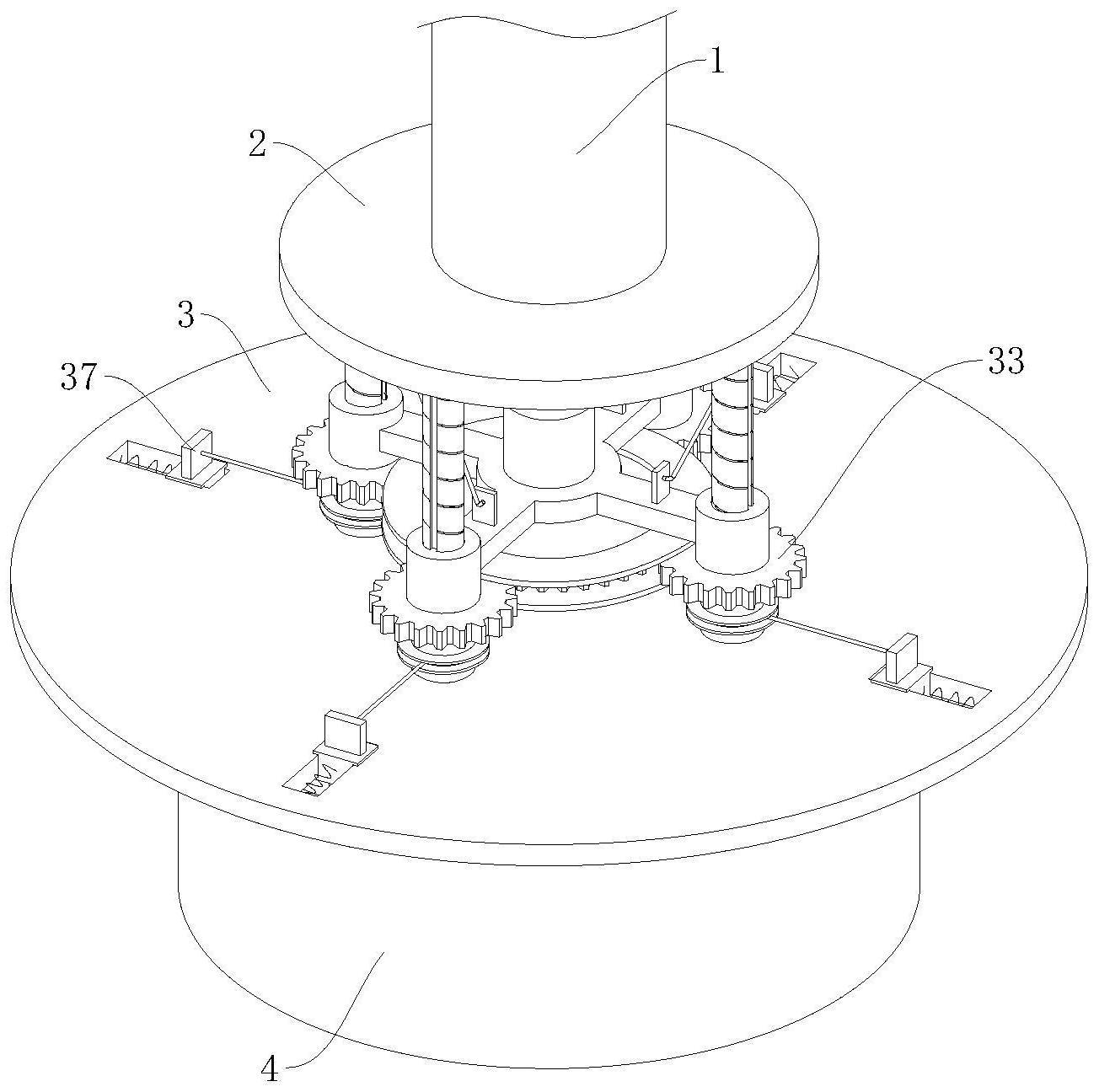
2、二、技术方案:为达到以上目的,本发明采用以下技术方案,一种工业机器人用机械手爪,包括机械臂、顶板和抓取部,机械臂的下端通过顶板设置有抓取部。
3、所述抓取部包括空心螺纹杆,顶板下端周向均匀设置有多个空心螺纹杆,空心螺纹杆下端通过第一扭簧转动连接有承托板,多个空心螺纹杆之间共同设置有传动机构,传动机构下端通过与空心螺纹杆滑动连接的支撑筒安装有按压板,按压板与空心螺杆滑动连接,多个支撑筒下端共同安装有与空心螺纹杆滑动连接的按压板,支撑筒与按压板之间转动连接,空心螺纹杆内部设置有旋转机构,支撑筒和按压板之间设置有紧固机构。
4、优选的,所述传动机构包括滑移套筒,空心螺纹杆外壁滑动套设有滑移套筒,多个滑移套筒之间安装有连接架,连接架上端通过电机座设置有正反转电机,正反转电机的输出轴套设有主动齿轮,空心螺纹杆外壁通过螺纹连接的方式套设有与主动齿轮相啮合的从动齿轮,从动齿轮转动连接在滑移套筒底部,从动齿轮下端与支撑筒相连接,主动齿轮的上下两侧壁均设置有环形挡板,环形挡板与从动齿轮的上下两侧壁转动连接。
5、优选的,所述旋转机构包括定位板,连接架上端相对于空心螺纹杆的一侧设置有定位板,定位板靠近空心螺纹杆的一侧设置有拉绳,空心螺纹杆靠近定位板的一侧开设有用于穿过拉绳的通孔,通孔与定位板相平齐,空心螺纹杆下端内部通过第二扭簧转动连接有收卷辊,拉绳远离定位板的一端卷绕在收卷辊上,收卷辊外壁套设有联动齿轮,承托板上端安装有与联动齿轮相啮合的面齿轮。
6、优选的,所述紧固机构包括导向滑槽,按压板上周向均匀开设有多个与空心螺纹杆位置相对应的导向滑槽,导向滑槽内滑动连接有位移块,位移块与导向滑槽远离空心螺纹杆的一侧连接有复位弹簧,位移块上端设置有固定板,支撑筒外壁套设有卷绕轮,卷绕轮上卷绕有与固定板相连接的钢丝绳,位移块下端安装有扣合件。
7、优选的,所述扣合件由安装块、齿条、连接板、收缩弹簧、联动轴、辅助齿轮和旋转杆组成,其中:安装块设置在位移块下端,安装块上贯穿开设有与导向滑槽相平行的连接孔,连接孔内部滑动连接有齿条,齿条远离空心螺纹杆的一侧安装有连接板,连接板与安装块之间关于齿条上下对称设置有两个收缩弹簧,连接孔下端开设有圆形槽以及关于齿条对称开设的两个让位槽,联动轴穿过圆形槽后转动连接在让位槽内,联动轴外壁套设有转动连接在圆形槽内的辅助齿轮,辅助齿轮与齿条相啮合,联动轴外壁关于辅助齿轮对称套设有两个转动连接在让位槽内的旋转杆,旋转杆靠近空心螺纹杆的一侧设置有防护垫。
8、优选的,所述空心螺纹杆的下端关于其轴线对称设置有两个限位板,承托板上端关于其长度方向的对称设置有两个辅助板,辅助板与限位板之间为垂直排布。
9、优选的,所述空心螺纹杆外壁关于其轴线对称开设有两个限位滑槽,滑移套筒内壁关于空心螺纹杆的轴线对称设置有两个滑动连接在限位滑槽内的滑移卡块。
10、优选的,所述按压板下端中部设置有防滑垫,按压板下端还设置有环形胶圈,环形胶圈的直径大于防滑垫的直径。
11、三、有益效果:1.本发明通过正反转电机带动主动齿轮和从动齿轮转动使得按压板向下移动并对轮毂进行按压固定,且从动齿轮通过滑移套筒带动连接架和定位板向下移动,以便于带动承托板旋转90度并抵靠在其相邻的两个轮辐底部,此外,从动齿轮通过支撑筒带动卷绕轮旋转,通过卷绕轮对钢丝绳的收卷和放卷可以带动位移块和安装块移动,以便于旋转杆抵靠在轮缘的底部,以此通过一个驱动便可以同时对轮毂、轮辐以及轮缘进行固定,从而整体的工作效率得到提高,且可以有效的降低成本。
12、2.本发明通过按压板带动防滑垫与轮毂的中心相抵接,且按压板带动环形胶圈与轮缘相抵接,从而通过按压板对轮毂进行按压固定,通过防滑垫可以增大其与轮辐之间的摩擦力,以确保拿取轮毂时的稳定性,且通过防滑垫和环形胶圈可以对轮辐和轮缘进行防护,防止拿取轮毂时对其造成划伤。
13、3.本发明提供的旋转机构通过定位板随连接架移动即可实现承托板的旋转并抵靠在其相邻的两个轮辐底部,以便于对轮辐进行支撑,无需外加驱动,操作便捷,且通过按压板对轮毂进行按压以及承托板对轮辐提供的支撑能够对轮毂进行限位。
14、4.本发明提供的紧固机构通过卷绕轮对钢丝绳收卷并带动位移块和安装块向靠近空心螺纹杆的一侧移动,使得齿条受挤压力向远离空心螺纹杆的一侧移动并带动辅助齿轮转动,辅助齿轮通过联动轴带动旋转杆向靠近轮毂的一侧旋转并带动防护垫抵靠在轮缘的底部,以便于旋转杆配合按压板对轮缘进行夹固,且通过多个旋转杆对轮缘进行夹固可以进一步提高对轮毂的稳定性。
15、5.本发明提供的防滑垫便于卡合在轮毂的中心圈上端,从而可以对本发明与轮毂之间进行矫正,使得按压板的轴线与轮毂的轴线相重合,进而确保本发明对轮辐进行固定时整个轮毂的平衡性,此外,通过多个旋转杆对轮缘进行夹固可以进一步增强轮毂在搬运过程中的平衡性,防止其发生倾斜而掉落。
技术特征:
1.一种工业机器人用机械手爪,包括机械臂(1)、顶板(2)和抓取部(3),其特征在于,机械臂(1)的下端通过顶板(2)设置有抓取部(3);
2.根据权利要求1所述的一种工业机器人用机械手爪,其特征在于:所述传动机构(33)包括滑移套筒(331),所述空心螺纹杆(31)外壁滑动套设有滑移套筒(331),多个滑移套筒(331)之间安装有连接架(332),连接架(332)上端通过电机座设置有正反转电机(333),正反转电机(333)的输出轴套设有主动齿轮(334),空心螺纹杆(31)外壁通过螺纹连接的方式套设有与主动齿轮(334)相啮合的从动齿轮(335),从动齿轮(335)转动连接在滑移套筒(331)底部,从动齿轮(335)下端与支撑筒(34)相连接,主动齿轮(334)的上下两侧壁均设置有环形挡板(336),环形挡板(336)与从动齿轮(335)的上下两侧壁转动连接。
3.根据权利要求2所述的一种工业机器人用机械手爪,其特征在于:所述旋转机构(36)包括定位板(361),所述连接架(332)上端相对于空心螺纹杆(31)的一侧设置有定位板(361),定位板(361)靠近空心螺纹杆(31)的一侧设置有拉绳(362),空心螺纹杆(31)靠近定位板(361)的一侧开设有用于穿过拉绳(362)的通孔,通孔与定位板(361)相平齐,空心螺纹杆(31)下端内部通过第二扭簧转动连接有收卷辊(363),拉绳(362)远离定位板(361)的一端卷绕在收卷辊(363)上,收卷辊(363)外壁套设有联动齿轮(364),承托板(32)上端安装有与联动齿轮(364)相啮合的面齿轮(365)。
4.根据权利要求1所述的一种工业机器人用机械手爪,其特征在于:所述紧固机构(37)包括导向滑槽(371),所述按压板(35)上周向均匀开设有多个与空心螺纹杆(31)位置相对应的导向滑槽(371),导向滑槽(371)内滑动连接有位移块(372),位移块(372)与导向滑槽(371)远离空心螺纹杆(31)的一侧连接有复位弹簧(373),位移块(372)上端设置有固定板(374),支撑筒(34)外壁套设有卷绕轮(375),卷绕轮(375)上卷绕有与固定板(374)相连接的钢丝绳(376),位移块(372)下端安装有扣合件(377)。
5.根据权利要求4所述的一种工业机器人用机械手爪,其特征在于:所述扣合件(377)由安装块(378)、齿条(379)、连接板(380)、收缩弹簧(381)、联动轴(382)、辅助齿轮(383)和旋转杆(384)组成,其中:所述安装块(378)设置在位移块(372)下端,安装块(378)上贯穿开设有与导向滑槽(371)相平行的连接孔,连接孔内部滑动连接有齿条(379),齿条(379)远离空心螺纹杆(31)的一侧安装有连接板(380),连接板(380)与安装块(378)之间关于齿条(379)上下对称设置有两个收缩弹簧(381),连接孔下端开设有圆形槽以及关于齿条(379)对称开设的两个让位槽,联动轴(382)穿过圆形槽后转动连接在让位槽内,联动轴(382)外壁套设有转动连接在圆形槽内的辅助齿轮(383),辅助齿轮(383)与齿条(379)相啮合,联动轴(382)外壁关于辅助齿轮(383)对称套设有两个转动连接在让位槽内的旋转杆(384),旋转杆(384)靠近空心螺纹杆(31)的一侧设置有防护垫。
6.根据权利要求1所述的一种工业机器人用机械手爪,其特征在于:所述空心螺纹杆(31)的下端关于其轴线对称设置有两个限位板(311),承托板(32)上端关于其长度方向的对称设置有两个辅助板(321),辅助板(321)与限位板(311)之间为垂直排布。
7.根据权利要求2所述的一种工业机器人用机械手爪,其特征在于:所述空心螺纹杆(31)外壁关于其轴线对称开设有两个限位滑槽(312),滑移套筒(331)内壁关于空心螺纹杆(31)的轴线对称设置有两个滑动连接在限位滑槽(312)内的滑移卡块(337)。
8.根据权利要求1所述的一种工业机器人用机械手爪,其特征在于:所述按压板(35)下端中部设置有防滑垫(351),按压板(35)下端还设置有环形胶圈(352),环形胶圈(352)的直径大于防滑垫(351)的直径。
技术总结
本发明涉及工业机械手技术领域,特别涉及一种工业机器人用机械手爪,包括机械臂、顶板和抓取部;现有的机械手存在以下问题:1.机械手夹持侧轮毂时其与侧轮毂之间的摩擦力较小,因此侧轮毂缺乏稳定性,容易滑落;2.钩爪和绑带对轮辐固定的位置无法得到校准,无法确保轮毂的平衡性,容易导致轮毂发生倾斜,进而轮毂缺乏稳定性;本发明通过按压板对轮毂进行按压固定的同时使得承托板抵靠在其相邻的两个轮辐底部,以便于增强拿取轮毂时的稳定性,且通过防滑垫便于对本发明与轮毂之间进行矫正,进而确保本发明对轮辐进行固定时整个轮毂的平衡性,且通过多个旋转杆对轮缘进行夹固可以进一步增强轮毂的平衡性和稳定性。
技术研发人员:张同兴,张涛,袁宗杰,韩婷婷,杜登云
受保护的技术使用者:山东劳动职业技术学院(山东劳动技师学院)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!