一种外骨骼机器人髋关节直驱助力装置的制作方法
本发明涉及机械手,尤其涉及一种外骨骼机器人髋关节直驱助力装置。
背景技术:
1、外骨骼机器人可将人体背负的重物重量均匀分散于人体背部,并且驱动装置可为穿戴者提供助力,从而减少人体肌肉损伤,降低人体代谢消耗。现有外骨骼机器人协同性差、重量重、影响穿戴者行走的灵活性和舒适性。
2、因此,提供一种协同性高、重量轻、运动灵活和舒适且助力效果好的外骨骼机器人髋关节直驱助力装置具有重要意义。
技术实现思路
1、为了克服现有技术中的不足,本发明的目的在于提供一种外骨骼机器人髋关节直驱助力装置,该外骨骼机器人髋关节直驱助力装置具有较高的协同性,其重量轻、灵活舒适、助力效果好。
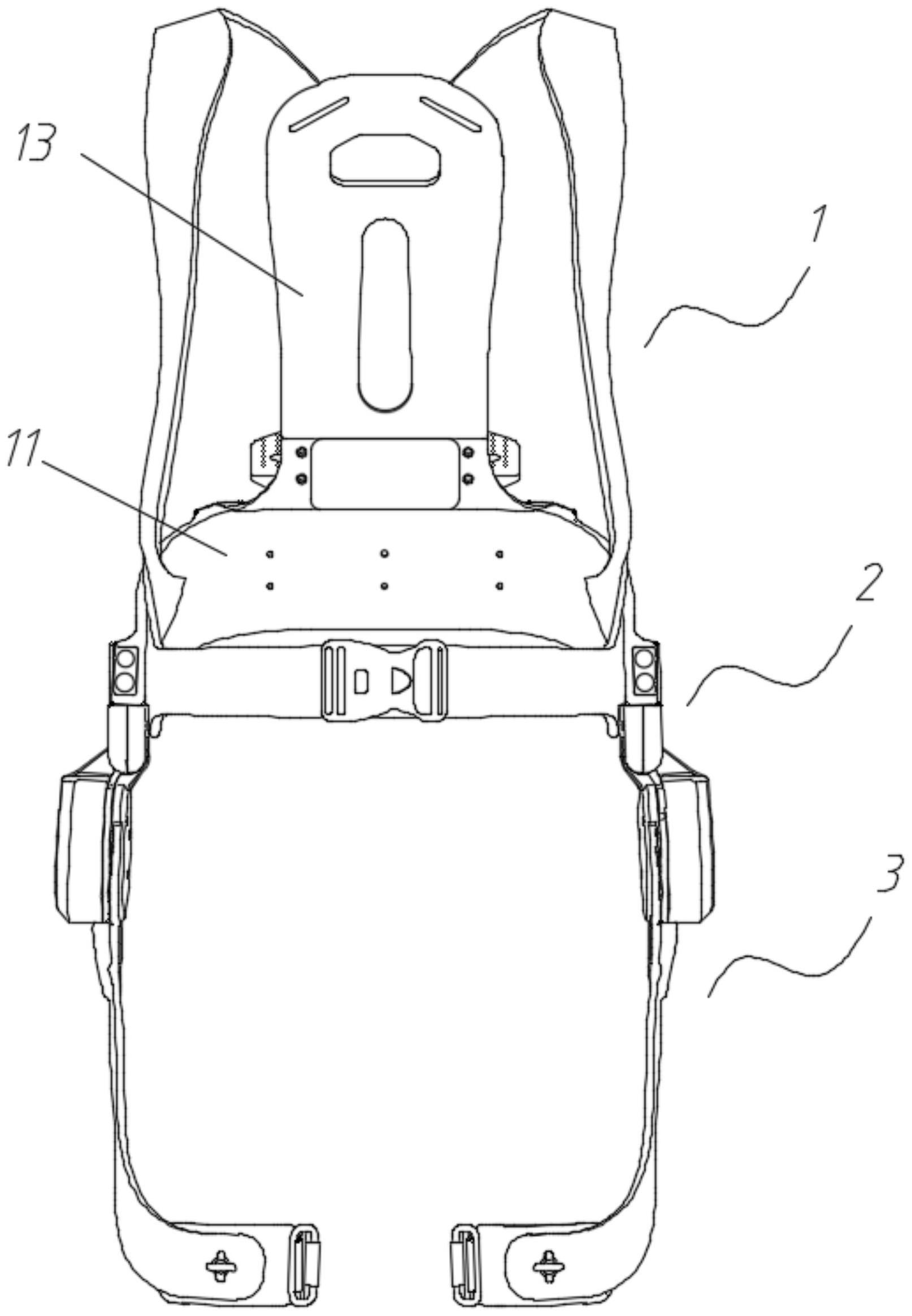
2、为了实现上述目的,本发明所采用的技术方案为:一种外骨骼机器人髋关节直驱助力装置,包括腰背组件、连接组件和髋部组件,所述腰背组件包括承重单元,所述承重单元包括腰板;
3、所述连接组件设置在所述腰板的一侧的下部;
4、所述髋部组件活动连接在连接组件的下部;
5、所述髋部组件包括动力器件和腿部连接件;
6、所述腿部连接件包括连接体和腿部绑缚件;
7、所述连接体包括第一水平部、第一弯曲部、第一垂直部、第二弯曲部和第二垂直部;
8、所述第一水平部的一端沿水平方向延伸,所述第一水平部的另一端与所述第一弯曲部的一端连接;
9、所述第一弯曲部的另一端相对于所述第一水平部向上弯曲;
10、所述第一垂直部的一端与所述第一弯曲部的另一端连接,所述第一垂直部的另一端沿所述第一弯曲部的另一端垂直向上延伸,所述第一垂直部相对于所述第一水平部空间垂直设置;
11、所述第二弯曲部的一端与所述第一垂直部的另一端连接,所述第二弯曲部的另一端沿所述第一垂直部的另一端向上弯曲;
12、所述第二垂直部的一端与所述第二弯曲部的另一端连接,所述第二垂直部的另一端沿所述第二弯曲部的另一端垂直向上延伸,所述第二垂直部相对于所述第一水平部空间垂直设置。
13、进一步地,所述腿部绑缚件上设置有旋钮;
14、所述第一水平部的另一端设置有旋钮限位孔,所述旋钮限位孔的高度大于旋钮的高度,所述旋钮限位孔的宽度小于旋钮的高度,所述第一水平部通过旋钮连接在腿部绑缚件外表面,所述连接体的第一水平部整体设置在腿部绑缚件外表面上。
15、进一步地,所述腿部绑缚件包括绑缚带、连接扣和魔术带;
16、所述绑缚带的一端与魔术带的一端连接,所述绑缚带的另一端与连接扣的一端连接,所述魔术带的另一端与所述连接扣的另一端可拆卸式连接,所述旋钮设置在所述绑缚带的中部。
17、进一步地,所述连接体的第二垂直部为半月形结构,所述第二垂直部的中部设置有凹槽。
18、进一步地,所述连接体的第二弯曲部的第一表面上设置有感应器。
19、进一步地,所述动力器件包括电机、电机安装座和电机壳;
20、所述电机包括转子和定子,所述转子设置在定子内部;
21、所述电机安装座中部设置有转子安装孔,所述转子的一端位于定子内部,所述转子的另一端穿过所述转子安装孔与所述第二垂直部固定连接;
22、所述定子与所述电机安装座固定连接;
23、所述电机壳包括第一电机壳和第二电机壳,所述第一电机壳设置在电机的外侧,所述第二电机壳设置在连接体的第二垂直部的外侧。
24、进一步地,所述连接组件包括连接块,所述连接块上部与所述腰板固定连接,所述连接块下部与所述电机安装座活动连接。
25、进一步地,所述承重单元还包括托板和背板,所述托板设置在所述腰板的第一表面上,所述背板纵向设置在所述腰板的第一表面的上部。
26、进一步地,所述腰背组件还包括穿戴单元,所述穿戴单元包括腰带、肩带,所述肩带沿腰带向上延伸。
27、进一步地,所述腰背组件还包括功能单元和能量单元;
28、所述功能单元分布在腰板上第一表面上、第一侧面上和第二侧面上,所述能量单元设置在腰板的第一表面上。
29、进一步地,在所述腰板的另一侧对称设置有连接组件和髋部组件。
30、本发明的有益效果在于:本发明的腿部连接件的连接体包括第一水平部、第一弯曲部、第一垂直部、第二弯曲部和第二垂直部,相邻的部与部之间平滑过渡,连接体的各个部与人体贴合性好,穿戴时人机协同性高、运动灵活、舒适、助力效果好。
31、本发明的腿部连接件的连接体为薄壁板状结构,重量轻,减轻了外骨骼机器人髋关节直驱助力装置的重量,此外,采用电机提供动力,进一步减轻了外骨骼机器人髋关节直驱助力装置的重量。
32、本发明的腿部绑缚件上设置有旋钮,连接体第一水平部的另一端设置有旋钮限位孔,腿部绑缚件与连接体通过旋钮实现快穿及快卸功能,穿、卸方便。
技术特征:
1.一种外骨骼机器人髋关节直驱助力装置,包括腰背组件、连接组件和髋部组件,其特征在于:
2.根据权利要求1所述的外骨骼机器人髋关节直驱助力装置,其特征在于:所述腿部绑缚件上设置有旋钮;
3.根据权利要求2所述的外骨骼机器人髋关节直驱助力装置,其特征在于:所述腿部绑缚件包括绑缚带、连接扣和魔术带;
4.根据权利要求3所述的外骨骼机器人髋关节直驱助力装置,其特征在于:所述连接体的第二垂直部为半月形结构,所述第二垂直部的中部设置有凹槽。
5.根据权利要求4所述的外骨骼机器人髋关节直驱助力装置,其特征在于:所述连接体的第二弯曲部的第一表面上设置有感应器。
6.根据权利要求5所述的外骨骼机器人髋关节直驱助力装置,其特征在于:所述动力器件包括电机、电机安装座和电机壳;
7.根据权利要求6所述的外骨骼机器人髋关节直驱助力装置,其特征在于:所述连接组件包括连接块,所述连接块上部与所述腰板固定连接,所述连接块下部与所述电机安装座活动连接。
8.根据权利要求7所述的外骨骼机器人髋关节直驱助力装置,其特征在于:所述承重单元还包括托板和背板,所述托板设置在所述腰板的第一表面上,所述背板纵向设置在所述腰板的第一表面的上部。
9.根据权利要求8所述的外骨骼机器人髋关节直驱助力装置,其特征在于:所述腰背组件还包括穿戴单元,所述穿戴单元包括腰带、肩带,所述肩带沿腰带向上延伸。
10.根据权利要求9所述的外骨骼机器人髋关节直驱助力装置,其特征在于:所述腰背组件还包括功能单元和能量单元;
11.根据权利要求1~10中任一项所述的外骨骼机器人髋关节直驱助力装置,其特征在于:在所述腰板的另一侧对称设置有连接组件和髋部组件。
技术总结
本发明涉及机械手技术领域,尤其涉及一种外骨骼机器人髋关节直驱助力装置,其包括腰背组件、连接组件和髋部组件,所述腰背组件包括承重单元,所述承重单元包括腰板,所述连接组件设置在所述腰板的一侧的下部,所述髋部组件活动连接在连接组件的下部,所述髋部组件包括动力器件和腿部连接件,所述腿部连接件包括连接体和腿部绑缚件,所述连接体包括第一水平部、第一弯曲部、第一垂直部、第二弯曲部和第二垂直部;本发明与人体贴合性好,穿戴时人机协同性高、运动灵活、舒适、助力效果好。
技术研发人员:肖陶康,宋定安,王克楠,李林,强利刚,李阳阳,郭超,杨义光,齐维伟,张勇,冉浩
受保护的技术使用者:贵州航天控制技术有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!