高空电气试验接线机器人的制作方法
本发明涉及一种机器人,更确切的说是一种高空电气试验接线机器人。
背景技术:
1、现有的高空电气试验接线机器人一般采用夹持的方式让验电夹与被测试导线固定配合,夹持结构夹住被测试导线后,一旦支撑结构及底座和移动车辆出现位移或歪倒时,容易扯坏被测试导线。例如专利公开号:cn216411341u公开了一种高空电气试验遥控接线夹紧装置 ,如图 11所示,这个装置的夹紧装置夹住被测试导线后,一旦支撑结构及底座和移动车辆出现位移或歪倒时,容易扯坏被测试导线。
技术实现思路
1、本发明的目的是提供一种高空电气试验接线机器人,能够通过范围接触弓形接触器、弹性导电弓、收窄接触导电装置、触发指示装置相结合,弹性金属导电杆与导电钢缆之间形成一个逐渐收窄的空间,从而提高被测试导线进入逐渐收窄空间的几率,当移动车辆出现小范围位移时,弹性导电弓、收窄接触导电装置能够通过形变让导电钢缆或弹性金属导电杆保持与导电导通配合,从而避免影响对被测试导线的连续监测,当移动车辆出现较大范围位移或歪倒时,范围接触弓形接触器能够通过形变让弹性导电弓或收窄接触导电装置与被测试导线脱离,从而避免一旦支撑结构及底座和移动车辆出现位移或歪倒时轻易扯坏被测试导线。
2、本发明为实现上述目的,通过以下技术方案实现:
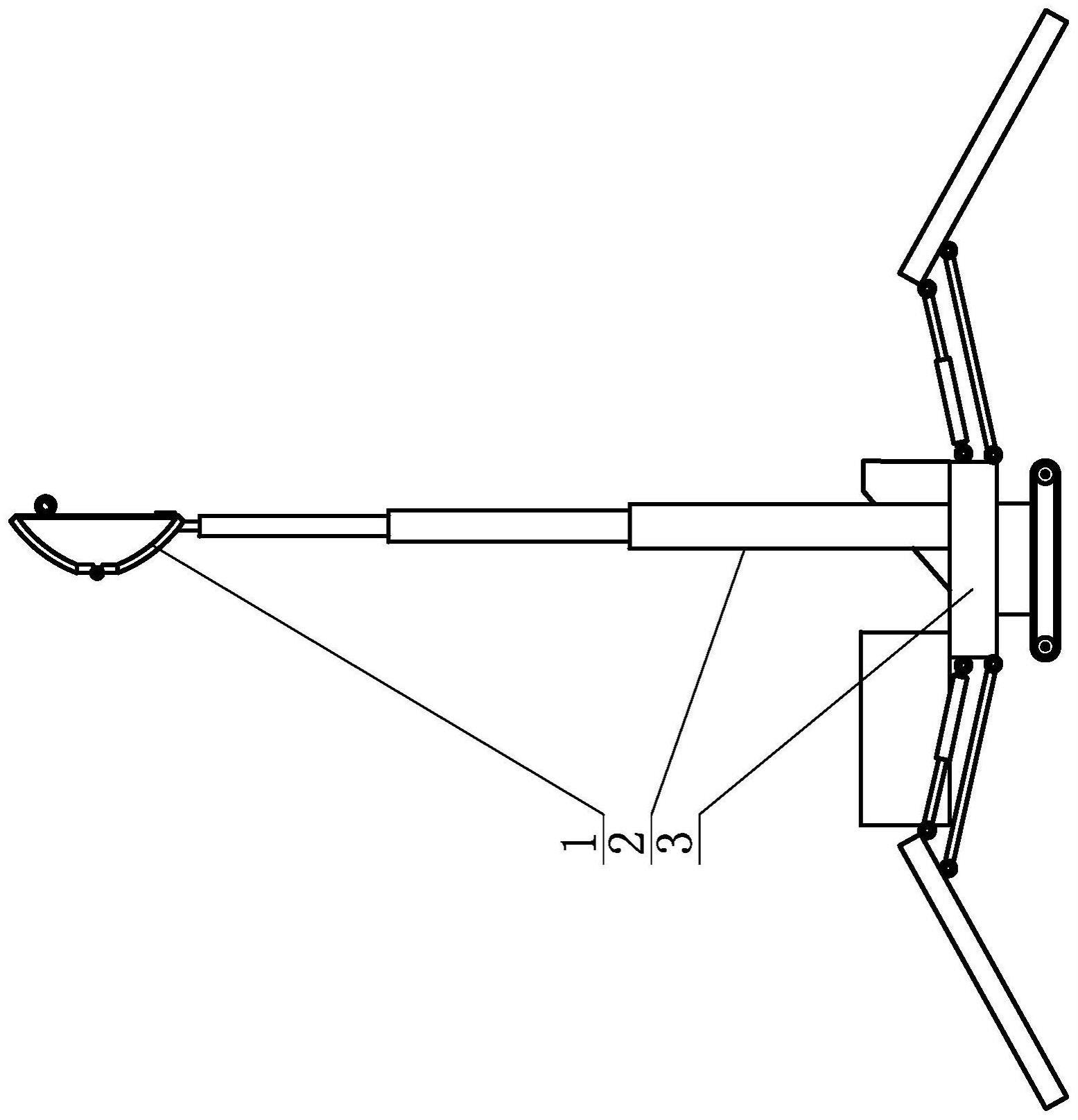
3、高空电气试验接线机器人,包括小型履带式蜘蛛吊车,小型履带式蜘蛛吊车上安装吊臂,其特征在于:所述吊臂的端部安装范围接触弓形接触器,范围接触弓形接触器包括弹性导电弓、收窄接触导电装置,所述弹性导电弓包括两个弧形杆,其中一个弧形杆的一端与另一个弧形杆的一端铰接,其中一个弧形杆的另一端连接导电钢缆,导电钢缆的一端连接拉簧的一端,拉簧的另一端与另一个弧形杆连接,两个弧形杆中,其中一个弧形杆的一侧与吊臂的端部连接,所述收窄接触导电装置包括弹性金属导电杆,弹性金属导电杆与导电钢缆之间形成一个逐渐收窄的空间。
4、为了进一步实现本发明的目的,还可以采用以下技术方案:所述两个弧形杆之间安装扭簧,扭簧的一端与其中一个弧形杆连接,扭簧的另一端与另一个弧形杆连接。
5、所述两个弧形杆中,与吊臂配合的弧形杆的一侧连接限位杆。
6、所述两个弧形杆中,与吊臂配合的弧形杆的一侧安装触发指示装置,所述触发指示装置包括常开开关,常开开关的固定端与弧形杆连接,常开开关的触发板与弹性金属导电杆、导电钢缆形成u形区域,小型履带式蜘蛛吊车的车体一侧连接led灯和蓄电池,常开开关、led灯和蓄电池串联。
7、本发明的优点在于:本发明通过范围接触弓形接触器、弹性导电弓、收窄接触导电装置、触发指示装置相结合,弹性金属导电杆与导电钢缆之间形成一个逐渐收窄的空间,从而提高被测试导线进入逐渐收窄空间的几率,当移动车辆出现小范围位移时,弹性导电弓、收窄接触导电装置能够通过形变让导电钢缆或弹性金属导电杆保持与导电导通配合,从而避免影响对被测试导线的连续监测,当移动车辆出现较大范围位移或歪倒时,范围接触弓形接触器能够通过形变让弹性导电弓或收窄接触导电装置与被测试导线脱离,从而避免一旦支撑结构及底座和移动车辆出现位移或歪倒时轻易扯坏被测试导线。
技术特征:
1.高空电气试验接线机器人,包括小型履带式蜘蛛吊车(3),小型履带式蜘蛛吊车(3)上安装吊臂(2),其特征在于:所述吊臂(2)的端部安装范围接触弓形接触器(1),范围接触弓形接触器(1)包括弹性导电弓、收窄接触导电装置,所述弹性导电弓包括两个弧形杆(8),其中一个弧形杆(8)的一端与另一个弧形杆(8)的一端铰接,其中一个弧形杆(8)的另一端连接导电钢缆(9),导电钢缆(9)的一端连接拉簧(10)的一端,拉簧(10)的另一端与另一个弧形杆(8)连接,两个弧形杆(8)中,其中一个弧形杆(8)的一侧与吊臂(2)的端部连接,所述收窄接触导电装置包括弹性金属导电杆(5),弹性金属导电杆(5)与导电钢缆(9)之间形成一个逐渐收窄的空间。
2.根据权利要求1所述的高空电气试验接线机器人,其特征在于:所述两个弧形杆(8)之间安装扭簧(11),扭簧(11)的一端与其中一个弧形杆(8)连接,扭簧(11)的另一端与另一个弧形杆(8)连接。
3.根据权利要求1所述的高空电气试验接线机器人,其特征在于:所述两个弧形杆(8)中,与吊臂(2)配合的弧形杆(8)的一侧连接限位杆(12)。
4.根据权利要求1所述的高空电气试验接线机器人,其特征在于:所述两个弧形杆(8)中,与吊臂(2)配合的弧形杆(8)的一侧安装触发指示装置,所述触发指示装置包括常开开关(13),常开开关(13)的固定端与弧形杆(8)连接,常开开关(13)的触发板与弹性金属导电杆(5)、导电钢缆(9)形成u形区域,小型履带式蜘蛛吊车(3)的车体一侧连接led灯(14)和蓄电池(15),常开开关(13)、led灯(14)和蓄电池(15)串联。
技术总结
高空电气试验接线机器人,包括小型履带式蜘蛛吊车,小型履带式蜘蛛吊车上安装吊臂,其特征在于:所述吊臂的端部安装范围接触弓形接触器,本发明通过范围接触弓形接触器、弹性导电弓、收窄接触导电装置、触发指示装置相结合,当移动车辆出现较大范围位移或歪倒时,范围接触弓形接触器能够通过形变让弹性导电弓或收窄接触导电装置与被测试导线脱离,从而避免一旦支撑结构及底座和移动车辆出现位移或歪倒时轻易扯坏被测试导线。
技术研发人员:曲文韬,赵航,袁杰,刘昊,张鹏,陈大庆,张楷,于鹏,吴名星,肖喜鹏,王童璐,陈康宁,李清泉,战忠洋,李守金,袁茂凯,罗鑫
受保护的技术使用者:国网山东省电力公司超高压公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!