一种智能装配机器人装配控制方法及控制系统与流程
本发明属于机器人控制领域,具体涉及一种智能装配机器人装配控制方法及控制系统。
背景技术:
1、智能装配生产线的信息化集成过程就是将物理对象(智能装配装备、产品)等与信息系统(如mes和erp)进行集成,通过计算机集成控制产品的装配过程。通过智能人机交互将机器和人的优势充分发挥,实现产品装配过程的智能化、高效化。总装智能生产线融合智能装备、智能配送、物联网、人工智能、数据挖掘、信息系统集成以及计算机仿真等先进技术。利用现代信息技术和网络技术,以“产品加工与装配”为主线,将由计算机、网络、数据库、设备、软件等所组成的系统平台构建成一个高速信息网,从而实现计划快速下达、作业调度控制、工艺指导、生产统计、设备状态监控、质量全面管控及追溯、生产信息协同(物料协同、准时配送、生产准备协同)等,最终实现设备的智能化、生产管理的信息化。
2、智能化装备单体虽然具备智能特征,但其功能和效率始终是优先的,无法满足现代制造业规模化发展的需求,因此,需要将智能化装备进一步发展,从而建立智能装配系统。
3、目前底层的多台智能化装备组成数字化装配生产线,实现智能化装备间的连接;多条数字化装配线进一步组成数字化车间,实现数字化生产线的连接;最终,数字化车间组成了智能化工厂,实现各数字化车间的连接。而顶层的应用层由物联网、云计算、大数据、机器学习、远程运维等使能技术组成,为智能装配系统提供技术支撑与服务。
4、现有技术中,在智能装配领域,流水线式产线作业十分常见,这种场景下的机器人运动模式固化,无法通过分析环境、对象与自身的状态关系,实现自主决策作业,装配零件单一,也就无法做到智能化适配多种不同装配需求的高精度标准。
技术实现思路
1、本发明的目的在于针对上述现有技术中的问题,提供一种智能装配机器人装配控制方法及控制系统,实现自主决策作业,智能化适配多种不同装配需求的高精度标准,采用区块链式消息共享机制在各个机器人间同步各自状态,并行协同控制各个机器人,提高作业效率。
2、为了实现上述目的,本发明有如下的技术方案:
3、一种智能装配机器人装配控制方法,包括:
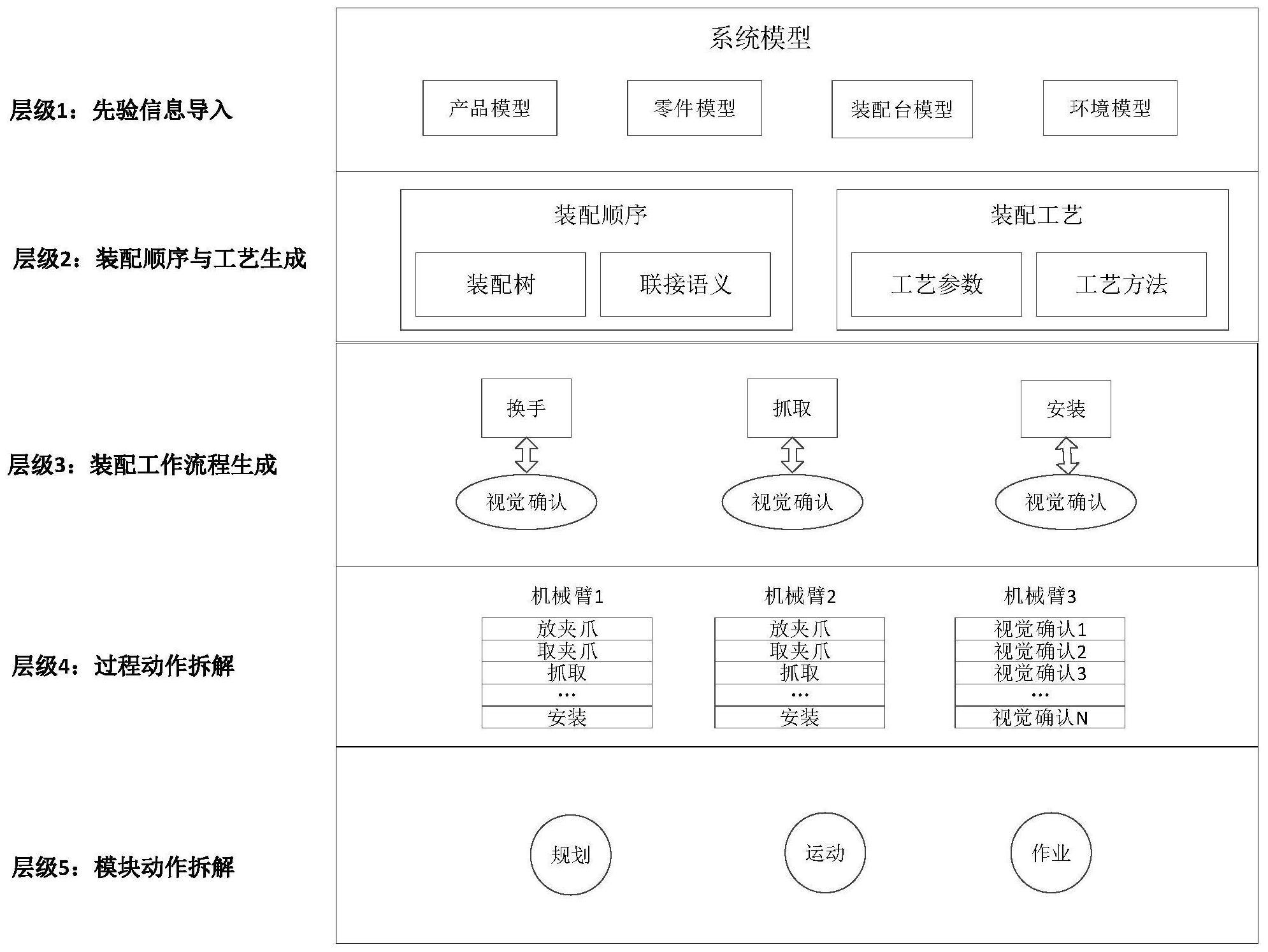
4、导入先验信息;
5、生成装配顺序与工艺;
6、依据先验信息以及装配顺序与工艺,生成每个零件的装配动作流程;
7、进行装配动作流程拆解,使得每个动作流程对应到一个或多个机械臂的运动控制上;
8、将每个机械臂的运动控制统一使用状态机模型来进行。
9、作为一种优选的方案,所述导入先验信息的步骤中,先验信息包括产品模型、零件模型、装配台模型与环境模型。
10、作为一种优选的方案,所述生成装配顺序与工艺的步骤中,装配顺序分析的输出通过树的结构表达,树的结构包括一棵或多棵树,其中在每棵树的结构中,叶子结点为初始零件,非叶子节点为装配形成的局部零件,每个装配动作均为将多个零件组装成部件,所述的零件为初始零件或者是部件。
11、作为一种优选的方案,所述导入先验信息的步骤中,首先提取零件的结构特征,通过结构特征间的关系,确定装配关系;
12、再通过结构特征分解其中关键的特征要素,对位置及姿态尺寸偏差情况微观统计得到位置公差,对形状尺寸偏差情况进行微观统计得到形状公差。
13、作为一种优选的方案,在所述依据先验信息以及装配顺序与工艺,生成每个零件的装配动作流程的步骤,以及进行装配动作流程拆解,使得每个动作流程对应到一个或多个机械臂的运动控制上的步骤中,依据元操作层级逐级拆解,一级元操作节点通过拆解业务流程得到,二级元操作节点通过分析机器人能做到的基础操作得到;每一个一级元操作均对应若干个二级元操作,级元操作是可复用的节点集。
14、作为一种优选的方案,在一级元操作生成时,核心算法为矩阵/模型决策,收集现场数据形成输入特征,依次迭代,形成一级元操作序列;收集的现场数据包括:三维点云数据、传感器数据、机器人反馈状态数据以及系统历史记录数据,通过不断的感知,不断的运动与环境交互,从中获取更新后的信息。
15、作为一种优选的方案,若二级元操作库涵盖机器人单次指令下发能做到的所有动作,则无论一级元操作定义为什么样的任务,只要是机器人能够完成的,均能够从二级元操作库中查到,并形成对应的二级元操作解法。
16、作为一种优选的方案,所述将每个机械臂的运动控制统一使用状态机模型来进行的步骤,每个机器人对应一个独立的状态机,每个状态机中包括6个状态:开始、结束、异常、路径规划、运动、作业。
17、作为一种优选的方案,路径规划内容为:机器人从起始位置运动至待作业操作点位序列路径,视觉确认与待作业操作位姿偏差,确认进行作业或重新进行路径规划以及运动调整;
18、两个机器人同时运动,无论是否有共同的作业对象,都为连续协同,依靠路径规划依照时间或位置给出的约束来分别控制机器人运动;离散协同使用协同条件进行触发或结束;
19、多机器人同时运动时,属于协同控制,考虑基于时间或位置进行路径规划;多机器人操作同一目标时,属于协同中的协作作业,在状态机控制时,产生多次交互;机器人之间数据状态共享,采用区块链式消息共享机制同步各自状态信息,属于分布式控制系统。
20、一种智能装配机器人装配控制系统,包括:
21、先验信息导入模块,用于导入先验信息;
22、装配顺序与工艺生成模块,用于生成装配顺序与工艺;
23、装配动作流程生成模块,用于依据先验信息以及装配顺序与工艺,生成每个零件的装配动作流程;
24、装配动作流程拆解模块,用于进行装配动作流程拆解,使得每个动作流程对应到一个或多个机械臂的运动控制上;
25、状态机表达模块,用于将每个机械臂的运动控制统一使用状态机模型来进行。
26、相较于现有技术,本发明至少具有如下的有益效果:
27、通过对环境、对象、本体模型进行分析,可以智能的生成装配顺序与装配流程,同时将多机器人底层设计统一控制模型为路径规划、运动、作业状态机模型,采用区块链式消息共享机制同步各自状态信息,最后采用具身智能框架进行信息收集与反馈处理,收集的信息包括三维点云数据、传感器数据、机器人反馈状态数据、系统历史记录数据,最终完成智能装配决策。本发明通过对总装模型和零件模型进行分析,获取装配关系和装配方式集合,形成零件装配关系与安装位置表,依据此推导零件装配顺序与零件装配工艺,遍历零件装配顺序,对每一个零件自动生成装配流程,然后调用状态机结合装配工艺完成具体的机械臂控制动作。本发明可以实现机器人自主装配决策作业,智能化适配多种不同装配需求,采用区块链式消息共享机制在各个机器人间同步各自状态,并行协同控制各个机器人,提高了作业效率。
技术特征:
1.一种智能装配机器人装配控制方法,其特征在于,包括:
2.根据权利要求1所述智能装配机器人装配控制方法,其特征在于,所述导入先验信息的步骤中,先验信息包括产品模型、零件模型、装配台模型与环境模型。
3.根据权利要求1所述智能装配机器人装配控制方法,其特征在于,所述生成装配顺序与工艺的步骤中,装配顺序分析的输出通过树的结构表达,树的结构包括一棵或多棵树,其中在每棵树的结构中,叶子结点为初始零件,非叶子节点为装配形成的局部零件,每个装配动作均为将多个零件组装成部件,所述的零件为初始零件或者是部件。
4.根据权利要求1所述智能装配机器人装配控制方法,其特征在于,所述导入先验信息的步骤中,首先提取零件的结构特征,通过结构特征间的关系,确定装配关系;
5.根据权利要求1所述智能装配机器人装配控制方法,其特征在于,在所述依据先验信息以及装配顺序与工艺,生成每个零件的装配动作流程的步骤,以及进行装配动作流程拆解,使得每个动作流程对应到一个或多个机械臂的运动控制上的步骤中,依据元操作层级逐级拆解,一级元操作节点通过拆解业务流程得到,二级元操作节点通过分析机器人能做到的基础操作得到;每一个一级元操作均对应若干个二级元操作,级元操作是可复用的节点集。
6.根据权利要求5所述智能装配机器人装配控制方法,其特征在于,在一级元操作生成时,核心算法为矩阵/模型决策,收集现场数据形成输入特征,依次迭代,形成一级元操作序列;收集的现场数据包括:三维点云数据、传感器数据、机器人反馈状态数据以及系统历史记录数据,通过不断的感知,不断的运动与环境交互,从中获取更新后的信息。
7.根据权利要求5所述智能装配机器人装配控制方法,其特征在于,若二级元操作库涵盖机器人单次指令下发能做到的所有动作,则无论一级元操作定义为什么样的任务,只要是机器人能够完成的,均能够从二级元操作库中查到,并形成对应的二级元操作解法。
8.根据权利要求1所述智能装配机器人装配控制方法,其特征在于,所述将每个机械臂的运动控制统一使用状态机模型来进行的步骤,每个机器人对应一个独立的状态机,每个状态机中包括6个状态:开始、结束、异常、路径规划、运动、作业。
9.根据权利要求8所述智能装配机器人装配控制方法,其特征在于,路径规划内容为:机器人从起始位置运动至待作业操作点位序列路径,视觉确认与待作业操作位姿偏差,确认进行作业或重新进行路径规划以及运动调整;
10.一种智能装配机器人装配控制系统,其特征在于,包括:
技术总结
一种智能装配机器人装配控制方法及控制系统,控制方法包括:导入先验信息;生成装配顺序与工艺;依据先验信息以及装配顺序与工艺,生成每个零件的装配动作流程;进行装配动作流程拆解,使得每个动作流程对应到一个或多个机械臂的运动控制上;将每个机械臂的运动控制统一使用状态机模型来进行。本发明同时将多机器人底层设计统一控制模型为路径规划、运动、作业状态机模型,采用区块链式消息共享机制同步各自状态信息,最后采用具身智能框架进行信息收集与反馈处理,收集的信息包括三维点云数据、传感器数据、机器人反馈状态数据、系统历史记录数据,最终完成智能装配决策。本发明可以实现自主决策作业,智能化适配多种不同装配需求的高精度标准。
技术研发人员:张岩,吴易明,舒磊,徐才,高宇波,马杰,肖历杨
受保护的技术使用者:西安中科光电精密工程有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!