一种张拉式夹持手爪、工作方法及机器人
本发明属于机器人,涉及一种张拉式夹持手爪、工作方法及机器人。
背景技术:
1、机械手和机械手爪一直是机器人领域的主要研究内容之一,在机器人研究中一直是热点。机械手爪的柔性,可以降低对机械手爪精度的要求,也可以减小机械手爪的控制难度。
2、目前提高机械手爪的柔性,主要是在材料上下功夫,即采用柔性材料以提高整体的柔性。刘晓敏等2021年在《农业机械学报》上发表的文章《气动球果采摘柔性手爪设计与实验》中,所提出的机械手爪结构采用3根柔性手指,手指都为柔性材料制作,其在气压作用下实现弯曲变形以达到与球果表面贴合。
3、柔性材料能够很好地提高机械手爪的柔性,但是刚度的损失也不可避免。当需要增加手爪整体刚度时,除了结构复杂性增加,柔性也会有一定的损失。
技术实现思路
1、本发明的目的在于解决现有技术中的问题,提供一种张拉式夹持手爪、工作方法及机器人
2、为了实现上述目的,本发明采用以下技术方案予以实现:
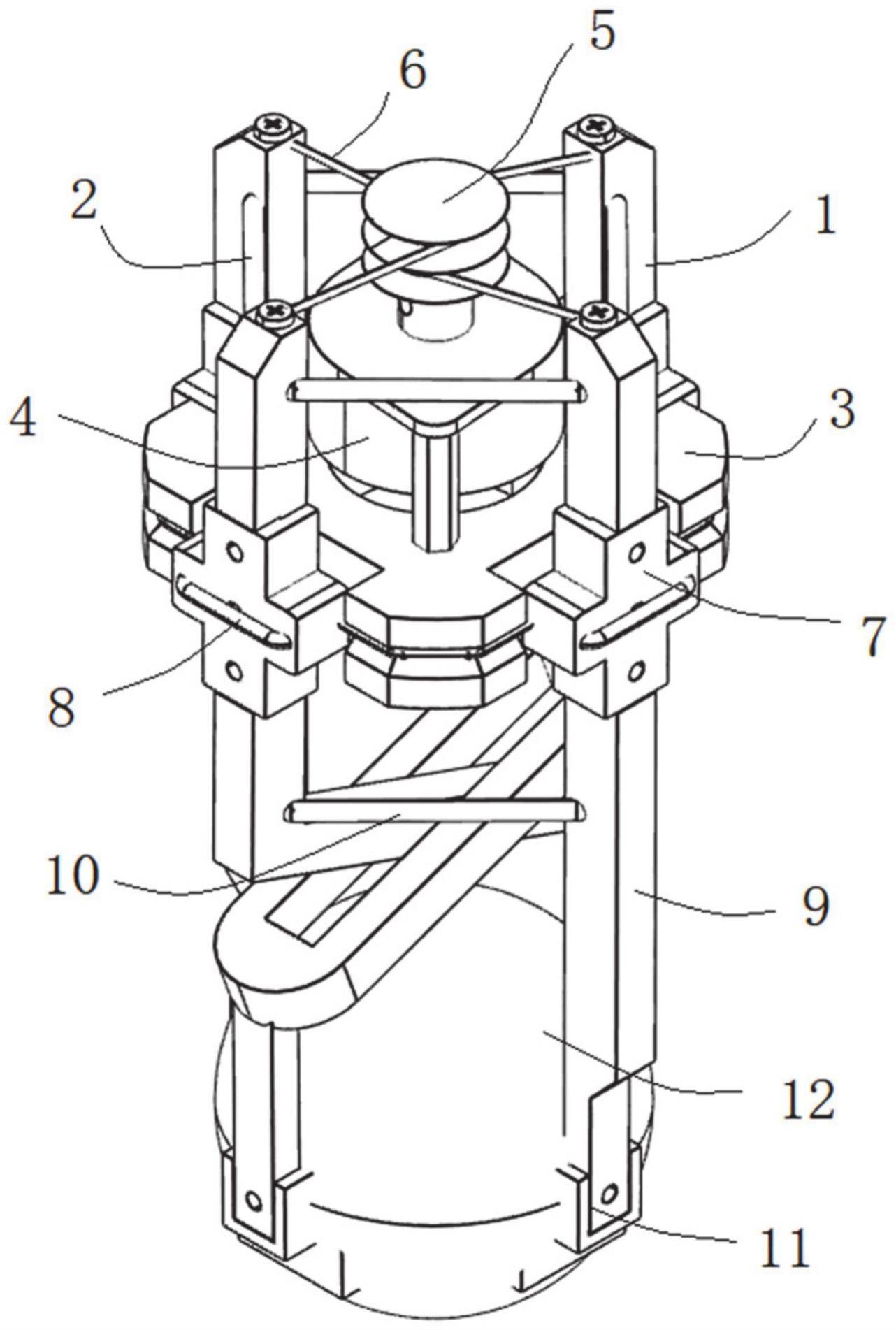
3、第一方面,本发明提供一种张拉式夹持手爪,包括:
4、多个上指节,多个上指节对称设置,多个上指节上贯穿有上协同索;
5、支架,设于多个上指节之间,支架上设有驱动机构,驱动机构上设有绳轮;
6、驱动索,具有两根,设于上指节上,两个驱动索缠绕在绳轮上,且绕向相反;
7、连接件,设于上指节的底部,连接件和支架上设有固定索;
8、下指节,设于远离上指节的一端,下指节上贯穿有下协同索;
9、爪头,设于下指节的底部,爪头适于夹持待夹持件。
10、第二方面,本发明提供一种张拉式夹持手爪的工作方法,包括以下步骤:
11、当驱动机构逆时针转动时,与下直杆指节连接的上指节朝着远离轴线中心的方向运动,其余两根上指节朝着靠近轴线中心的方向运动,对应的,两根下直杆指节所连接的爪头朝着靠近轴线中心的方向运动,第一折杆指节和第二折杆指节所连接的爪头朝着靠近轴线中心的方向运动,完成下指节的“抓取”动作;
12、当驱动机构顺时针转动时,两根下直杆指节连接的上指节朝着靠近轴线中心的方向运动,其余两根上指节朝着远离轴线中心的方向运动,对应的,两根下直杆指节所连接的爪头朝着远离轴线中心的方向运动,第一折杆指节和第二折杆指节所连接的爪头朝着远离轴线中心的方向运动,完成下指节的“张开”动作。
13、第三方面,本发明提供一种机器人,包括上述的张拉式夹持手爪。
14、与现有技术相比,本发明具有以下有益效果:
15、本发明提供的张拉式夹持手爪,通过在多个上指节之间设置上协同索,即可以利用上协同索对多个上指节进行连接,使得多个上指节形成一体结构。在多个上指节之间设有支架,该支架的设置为驱动机构提供了安装位置,同时,也便于将绳轮安装在驱动机构上。其中,驱动索缠绕在绳轮上,并且,两根驱动索的绕向相反,即可以在驱动机构动作时,驱动机构带动绳轮进行转动,使得驱动索缠绕在绳轮上,进而带动了与驱动索连接的上指节进行移动;连接件连接上指节和下指节,并利用支架、以及固定索对上指节进一步固定,利用下协同索连接下指节,从而保证了该张拉式夹持手爪的稳定性和紧固性。
16、其中,驱动机构动作时,驱动机构带动绳轮进行转动,使得驱动索缠绕在绳轮上,进而带动了与驱动索连接的上指节、下指节移动,该移动方向为相对驱动机构和绳轮所在的轴线中心做远离或靠近运动,使得爪头张开或收拢,从而抓取待夹持件。
17、该张拉式夹持手爪的多个上指节和下指节之间通过固定索相连接,使整个张拉式夹持手爪在抓取过程中更具有柔性;同时,为单驱动机构进行驱动,将两组绕向相反的驱动索通过绳轮来进行驱动,更具简洁性与创新性;并且,结构连接简单,拆卸方便,可以很容易的对其中某个或者某些零部件进行轻易的更换。
18、进一步的,本发明第一折杆指节具有通孔,第二折杆指节插入至所述通孔内。即实现了第一折杆指节和第二折杆的交叠设置,交叠设置的两个折杆指节增加了该下指节的稳定性。
19、进一步的,本发明通过在侧壁上设置第一槽体,即为连接件提供了容纳空间,便于容纳连接件,使得该张拉式夹持手爪的结构更加的紧凑。凹槽的设置,便于将固定锁套设在该支架上。同时,所述连接件上设有贯穿孔,所述贯穿孔适于所述固定索的贯穿。即固定索套设在凹槽上,并通过连接件上的贯穿孔,实现了支架和连接件的连接。
技术特征:
1.一种张拉式夹持手爪,其特征在于,包括:
2.根据权利要求1所述的张拉式夹持手爪,其特征在于,所述下指节(9)包括下直杆指节(13)、第一折杆指节(14)和第二折杆指节(15),下协同索(10)贯穿下直杆指节(13)、第一折杆指节(14)和第二折杆指节(15)。
3.根据权利要求2所述的张拉式夹持手爪,其特征在于,所述第一折杆指节(14)具有通孔(16),第二折杆指节(15)插入至通孔(16)内。
4.根据权利要求1-3中任一项所述的张拉式夹持手爪,其特征在于,所述支架(3)包括本体(17)和凹槽(19),所述本体(17)的侧壁上设有用于容纳连接件(7)的第一槽体(18);所述凹槽(19)设于本体(17)的外壁上,凹槽(19)上套设有固定锁(8)。
5.根据权利要求4所述的张拉式夹持手爪,其特征在于,所述连接件(7)的两端设有用于容纳上指节(1)和下指节(9)的第二槽体(20)。
6.根据权利要求5所述的张拉式夹持手爪,其特征在于,所述连接件(7)上设有用于贯穿固定索(8)的贯穿孔(21)。
7.根据权利要求5所述的张拉式夹持手爪,其特征在于,所述连接件(7)为十字型。
8.根据权利要求4的张拉式夹持手爪,其特征在于,所述驱动机构(4)为电机。
9.一种权利要求1-8中任一项所述的张拉式夹持手爪的工作方法,包括:
10.一种机器人,其特征在于,包括权利要求1-8中任一项所述的张拉式夹持手爪。
技术总结
本发明公开了一种张拉式夹持手爪、工作方法及机器人,包括多个上指节、支架、驱动索、连接件、下指节以及爪头;多个上指节对称设置,多个上指节上贯穿有上协同索;支架设于多个上指节之间,支架上设有驱动机构,驱动机构上设有绳轮;驱动索设于上指节上,两个驱动索缠绕在绳轮上,且绕向相反;连接件设于上指节的底部,连接件和支架上设有固定索;下指节设于远离上指节的一端,下指节上贯穿有下协同索;爪头设于下指节的底部,爪头适于夹持待夹持件。该张拉式夹持手爪的多个上指节和下指节之间通过固定索相连接,使整个张拉式夹持手爪在抓取过程中更具有柔性。
技术研发人员:刘沛麟,锁高洁
受保护的技术使用者:西安交通大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!