机器人的控制方法及装置与流程
本申请涉及人工智能,具体涉及一种机器人的控制方法及装置。
背景技术:
1、现有随着智能机器人在室内家庭场景中的应用,对其智能化要求越来越高,例如智能导航、智能陪伴、智能服务等。现有机器人主要依靠机器控制指令进行驱动,而控制指令主要是对用户输入解析后由机器人执行,现有技术会将各种用户输入都解析为控制指令,将会导致不属于控制指令的文本也解析为控制指令,导致对机器人控制的准确率不高。
2、也即,现有技术中对机器人控制的准确率较低。
技术实现思路
1、本申请实施例提供一种机器人的控制方法及装置,可以提高对机器人控制的准确率。
2、第一方面,本申请提供的机器人的控制方法,包括:
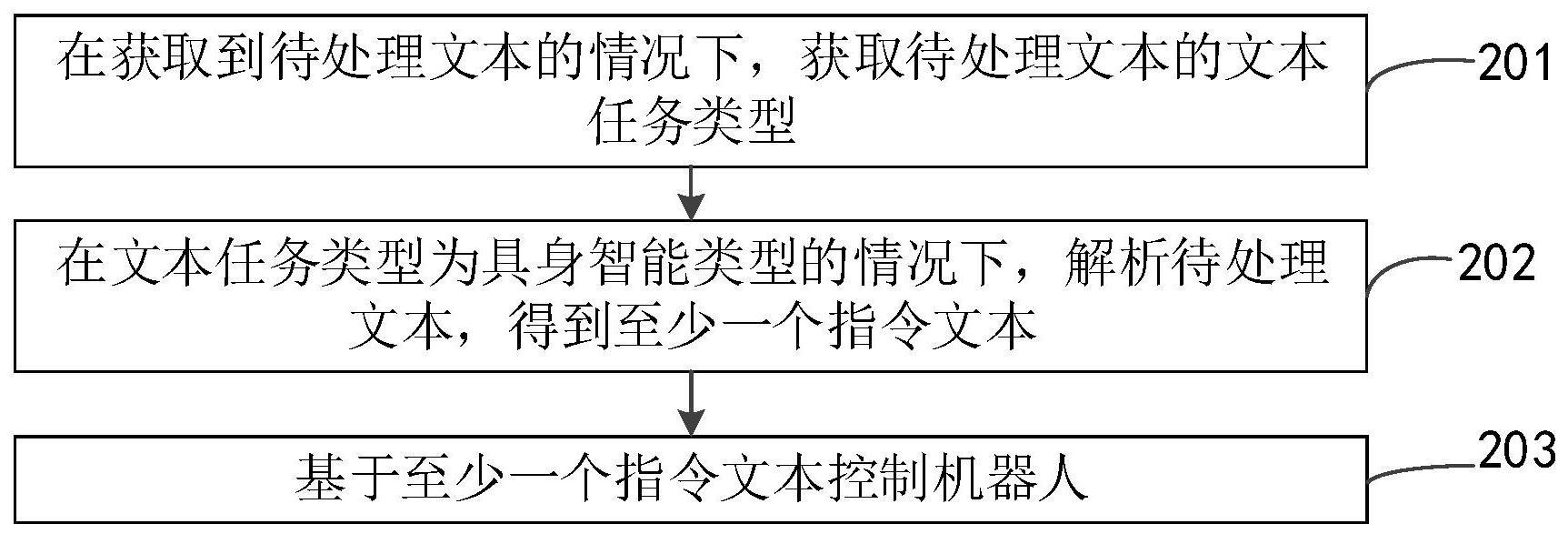
3、在获取到待处理文本的情况下,获取所述待处理文本的文本任务类型;
4、在所述文本任务类型为具身智能类型的情况下,解析所述待处理文本,得到至少一个指令文本;
5、基于至少一个所述指令文本控制所述机器人。
6、第二方面,本申请提供的机器人的控制装置,包括:
7、获取模块,用于在获取到待处理文本的情况下,获取所述待处理文本的文本任务类型;
8、解析模块,用于在所述文本任务类型为具身智能类型的情况下,解析所述待处理文本,得到至少一个指令文本;
9、控制模块,用于基于至少一个所述指令文本控制所述机器人。
10、第三方面,本申请提供的电子设备,包括存储器和处理器,存储器存储有计算机程序,处理器用于运行存储器内的计算机程序,实现本申请所提供的机器人的控制方法中的步骤。
11、第四方面,本申请提供的计算机可读存储介质,存储有多条指令,该指令适于处理器进行加载,实现本申请所提供的机器人的控制方法中的步骤。
12、第五方面,本申请提供的计算机程序产品,包括计算机程序或指令,该计算机程序或指令被处理器执行时实现本申请所提供的机器人的控制方法中的步骤。
13、本申请中,相较于相关技术,在获取到待处理文本的情况下,获取待处理文本的文本任务类型;在文本任务类型为具身智能类型的情况下,解析待处理文本,得到至少一个指令文本;基于至少一个指令文本控制机器人。本申请在获取到待处理文本时,先获取待处理文本的文本任务类型,在待处理文本的文本任务类型为具身智能类型时,表明此时用户想要进行机器人控制,此时再将待处理文本解析为至少一个指令文本,然后由机器人执行,由于在待处理文本的文本任务类型为具身智能类型时才进行指令解析,能够提高控制机器人的准确率。
技术特征:
1.一种机器人的控制方法,其特征在于,包括:
2.根据权利要求1所述的机器人的控制方法,其特征在于,所述获取所述待处理文本的文本任务类型,包括:
3.根据权利要求1所述的机器人的控制方法,其特征在于,所述解析所述待处理文本,得到至少一个指令文本,包括:
4.根据权利要求3所述的机器人的控制方法,其特征在于,所述基于预训练的预设文本解析模型解析所述待处理文本,得到至少一个指令文本,之前,包括:
5.根据权利要求3所述的机器人的控制方法,其特征在于,所述基于预训练的预设文本解析模型解析所述待处理文本,得到至少一个指令文本,包括:
6.根据权利要求3所述的机器人的控制方法,其特征在于,所述基于预训练的预设文本解析模型解析所述待处理文本,得到至少一个指令文本,包括:
7.根据权利要求1所述的机器人的控制方法,其特征在于,所述机器人的控制方法,包括:
8.根据权利要求1所述的机器人的控制方法,其特征在于,所述机器人的控制方法包括:
9.一种机器人的控制装置,其特征在于,包括:
10.一种电子设备,其特征在于,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器用于运行所述存储器内的计算机程序,以执行权利要求1至8任一项所述的机器人的控制方法中的步骤。
11.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有多条指令,所述指令适于处理器进行加载,以执行权利要求1至8任一项所述的机器人的控制方法中的步骤。
12.一种计算机程序产品,包括计算机程序或指令,其特征在于,该计算机程序或指令被处理器执行时实现权利要求1至8任一项所述的机器人的控制方法中的步骤。
技术总结
本申请公开了一种机器人的控制方法及装置,在获取到待处理文本的情况下,获取待处理文本的文本任务类型;在文本任务类型为具身智能类型的情况下,解析待处理文本,得到至少一个指令文本;基于至少一个指令文本控制机器人。本申请在获取到待处理文本时,先获取待处理文本的文本任务类型,在待处理文本的文本任务类型为具身智能类型时,表明此时用户想要进行机器人控制,此时再将待处理文本解析为至少一个指令文本,然后由机器人执行,由于在待处理文本的文本任务类型为具身智能类型时才进行指令解析,能够提高控制机器人的准确率。
技术研发人员:吴若溪
受保护的技术使用者:北京欧珀通信有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!