机械臂的工作空间生成方法、装置和计算机设备与流程
本技术涉及自动控制,特别是涉及一种机械臂的工作空间生成方法、装置和计算机设备。
背景技术:
1、随着自动控制技术的不断发展,机器人被广泛应用于各行各业,在应用机器人的各种场景和任务中,对机械臂的末端执行器需要到达的位置、姿态有着不同的要求。传统的做法是预先估计在满足任务要求的前提下机械臂的末端执行器的活动范围,但存在机械臂的末端执行器不能完全满足任务要求的可能。由于不能确定一个机械臂是否能够满足某个任务的要求,在部署完成机械臂后,任需要通过人工走点的形式进行全流程测试。
2、现有技术中也有采用在机械臂关节空间中采样后,进行正向运动学的计算求解出笛卡尔空间中机械臂末端执行器工作空间的方法,这样的方法只适用于具有较少关节的机械臂,对于多关节的机械臂需要进行极大量的计算且存在大量冗余的计算等问题。因此,如何进行对不同关节的机械臂的工作空间进行准确规划是现阶段要解决的问题。
技术实现思路
1、基于此,本技术目的在于提供一种准确地生成机械臂的工作空间的方法、装置和计算机设备,来解决上述背景技术中提及的技术问题。
2、第一方面,本技术提供了一种机械臂的工作空间生成方法。包括:
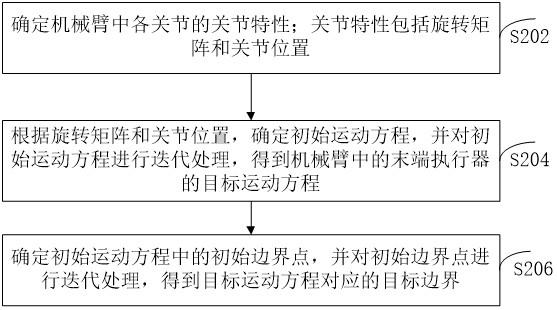
3、确定机械臂中各关节的关节特性;关节特性包括旋转矩阵和关节位置;
4、根据旋转矩阵和关节位置,确定初始运动方程,并对初始运动方程进行迭代处理,得到机械臂中的末端执行器的目标运动方程;
5、确定初始运动方程中的初始边界点,对初始边界点进行迭代处理,得到目标运动方程对应的目标边界;目标边界表征机械臂所能到达的工作空间的边界。
6、在一个实施例中,根据旋转矩阵和关节位置,确定初始运动方程,包括:确定多个关节中的初始关节,并确定初始关节的上一相邻关节的坐标系相对于初始关节的坐标系的相邻关节位置;确定初始关节的坐标系相对于下一相邻关节的坐标系的初始旋转矩阵和初始关节位置;根据相邻关节位置、初始旋转矩阵和初始关节位置,构建初始运动方程。
7、在一个实施例中,对初始运动方程进行迭代处理,得到机械臂中的末端执行器的目标运动方程,包括:确定多个关节中的第j关节,并确定第j关节的坐标系相对于第j-1关节的坐标系的第j旋转矩阵和第j关节位置;根据第j旋转矩阵和第j关节位置,对初始运动方程进行旋转平移处理,得到第j关节对应的候选运动方程;将第j-1关节作为新的第j关节、将第j-2关节作为新的第j-1关节、将候选运动方程作为新的初始运动方程,并返回至确定第j关节的坐标系相对于第j-1关节的坐标系的第j旋转矩阵和第j关节位置的步骤继续进行,直至得到第1关节对应的候选运动方程;将第1关节对应的候选运动方程,作为机械臂中的末端执行器的目标运动方程。
8、在一个实施例中,确定初始运动方程中的初始边界点,包括:确定多个关节中的初始关节的关节限位,并在初始关节的关节限位内按照预设步长进行采样,得到多个初始采样值;根据多个初始采样值和初始运动方程,得到多个初始边界点。
9、在一个实施例中,对初始边界点进行迭代处理,得到目标运动方程对应的目标边界包括:确定初始边界点对应的首个候选运动方程;确定多个关节中的第j关节的关节限位,在第j关节的关节限位内按照预设步长进行采样,得到多个候选采样值;根据候选采样值和首个候选运动方程,得到第j关节对应的候选边界点;对多个候选边界点进行迭代处理,得到目标运动方程的目标边界。
10、在一个实施例中,对多个候选边界点进行迭代处理,得到目标运动方程对应的目标边界,包括:对多个候选边界点进行切片分组得到多组切片点,并获取第j-1关节对应的候选运动方程;根据多组切片点和第j-1关节对应的候选运动方程,得到第j-1关节对应的多个当前边界点;将当前边界点作为新的候选边界点、将第j-2关节作为新的第j-1关节,并返回至对多个候选边界点进行切片分组得到多组切片点,并获取第j-1关节对应的候选运动方程的步骤继续进行,直至得到第1关节对应的多个当前边界点;基于第1关节对应的多个当前边界点,得到目标运动方程对应的目标边界。
11、在一个实施例中,根据多组切片点和第j-1关节对应的候选运动方程,得到第j-1关节对应的多个当前边界点,包括:针对每组中的多个切片点,均通过第j-1关节对应的候选运动方程,确定每个切片点各自对应的空间点;空间点包括内部点和边界点;通过预设的检索算法对多个空间点进行遍历,并剔除空间点中的内部点,直至得到第j-1关节对应的多个当前边界点。
12、第二方面,本技术还提供了一种机械臂的工作空间生成装置。包括:
13、关节特性确定模块,用于确定机械臂中各关节的关节特性;关节特性包括旋转矩阵和关节位置;
14、运动方程确定模块,用于根据旋转矩阵和关节位置,确定初始运动方程,并对初始运动方程进行迭代处理,得到机械臂中的末端执行器的目标运动方程;
15、目标边界确定模块,用于确定初始运动方程中的初始边界点,并对初始边界点进行迭代处理,得到目标运动方程对应的目标边界;目标边界表征机械臂所能到达的工作空间的边界。
16、第三方面,本技术还提供了一种计算机设备。计算机设备包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时实现以下步骤:
17、确定机械臂中各关节的关节特性;关节特性包括旋转矩阵和关节位置;
18、根据旋转矩阵和关节位置,确定初始运动方程,并对初始运动方程进行迭代处理,得到机械臂中的末端执行器的目标运动方程;
19、确定初始运动方程中的初始边界点,对初始边界点进行迭代处理,得到目标运动方程对应的目标边界;目标边界表征机械臂所能到达的工作空间的边界。
20、第四方面,本技术还提供了一种计算机可读存储介质。计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行时实现以下步骤:
21、确定机械臂中各关节的关节特性;关节特性包括旋转矩阵和关节位置;
22、根据旋转矩阵和关节位置,确定初始运动方程,并对初始运动方程进行迭代处理,得到机械臂中的末端执行器的目标运动方程;
23、确定初始运动方程中的初始边界点,对初始边界点进行迭代处理,得到目标运动方程对应的目标边界;目标边界表征机械臂所能到达的工作空间的边界。
24、上述机械臂的工作空间生成方法、装置、计算机设备和可读存储介质,通过确定机械臂中各关节的关节特性,进而得到关节特性包括的旋转矩阵和关节位置;接着根据旋转矩阵和关节位置,先确定出初始运动方程,再对初始运动方程进行迭代处理,便可得到机械臂中的末端执行器的目标运动方程;通过先确定出初始运动方程中的初始边界点,再对初始边界点进行迭代处理,便可得到目标运动方程对应的目标边界。由于是先基于对初始运动方程的迭代处理,确定出末端执行器的目标运动方程,再基于对初始边界点的迭代处理,使得最后得到的目标边界更加准确,且不用再通过正向运动学进行坐标转换,避免了传统方案中存在大量冗余的计算的问题。
25、此外,由于直接基于机械臂的关节特性,便可确定不同数量关节的机械臂在满足任务要求下能够实现的所有位姿的边界,使得布局机器人产线的工作就被简化成确定机械臂的工作空间的过程,如此,自动化场景的产线布局工作就能够被极大的简化,并且产线布局的准确性能够被很大的提高。
- 还没有人留言评论。精彩留言会获得点赞!