一种托盘式送餐机器人的制作方法
本发明涉及餐饮设备,具体为一种托盘式送餐机器人。
背景技术:
1、近年来,随着餐饮行业的迅速发展,部分餐厅已经采用了餐厅服务机器人进行送菜,现有多数的送餐机器人往往是和托盘搭配使用,减少了员工的劳动量,但是在实际使用的过程中发现:餐盘一般为人工放置于托盘上,在放置餐盘的过程中,托盘重心容易失稳,导致运输途中餐盘滑落,且送餐机器人一般为送至客人的餐桌盘旁,当出现比较调皮的小孩在餐厅进行跑动时,也可能撞到送餐机器人,餐盘可能会掉落对小孩造成伤害,为此,我们提出一种托盘式送餐机器人。
技术实现思路
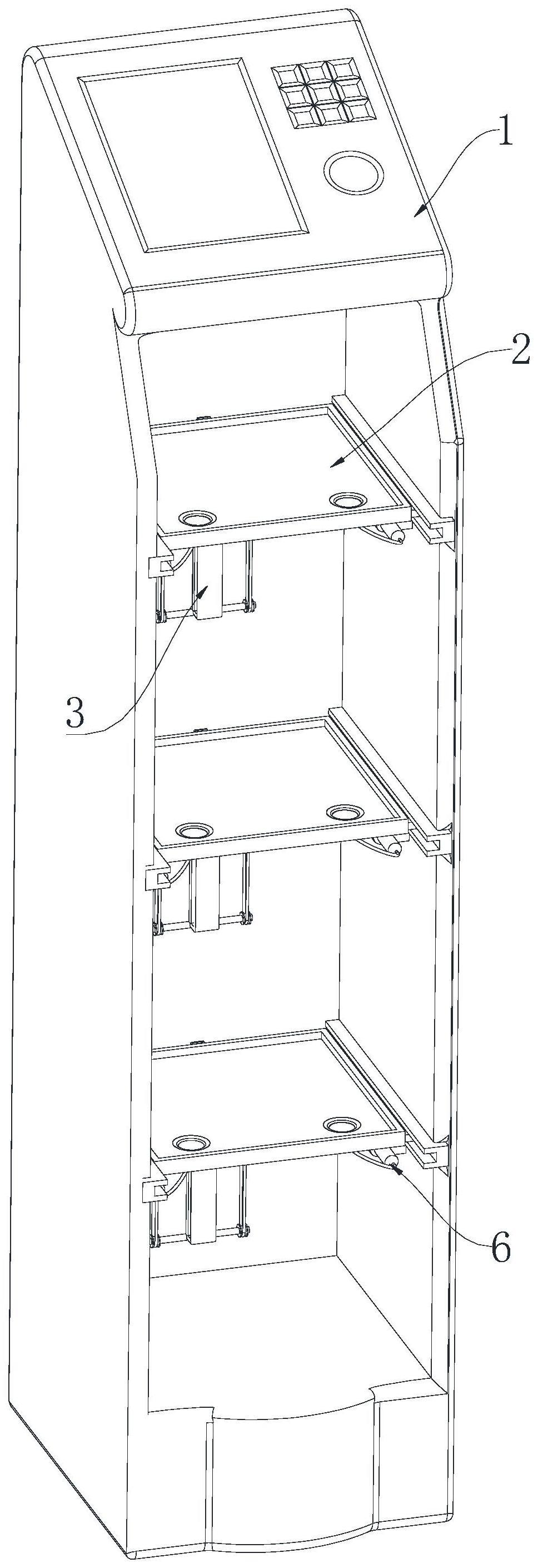
1、为解决上述技术问题,本申请实施例提供一种托盘式送餐机器人,包括机器人主体和通过导轨安装在机器人主体上托盘,还包括:
2、翻转平衡机构,所述翻转平衡机构安装在机器人主体上,且与托盘连接,所述翻转平衡机构使托盘在拉出机器人主体时,向托盘拉出的反方向增加重量;
3、控制机构,所述控制机构安装在机器人主体上,且与托盘连接,所述控制机构使托盘位于机器人主体内部时,对翻转平衡机构的位置进行限制,并使托盘想外拉时,进行解除;
4、复位机构,所述复位机构安装在机器人主体上,且与托盘连接,所述复位机构使托盘位于机器人主体外部,向内推时,翻转平衡机构和控制机构恢复至原本的状态;
5、餐盘吸附机构,所述餐盘吸附机构安装在就机器人主体上,且与托盘连接,所述餐盘吸附机构使托盘向机器人内部推时,对托盘上的餐盘进行吸附,托盘向外拉时,解除对餐盘的吸附。
6、在一些实施例中,所述翻转平衡机构包括安装在机器人主体上的引导座,所述引导座上贯穿安装有轴一和轴二,所述轴一和轴二两侧均安装有重物块,所述轴一和轴二上均安装有滚筒,所述引导座上安装有支撑杆一,所述支撑杆一上相对安装有定滑轮,所述机器人主体上安装有支撑架一,所述轴一上相对安装有套环一,所述托盘上相对安装有钢绳一,所述钢绳一另一端与套环一连接,且期间均绕过支撑架一和定滑轮。
7、在一些实施例中,所述控制机构包括在引导座上开设的凹槽一,所述引导座上安装有支撑架二,所述支撑架二上贯穿安装有限位杆,所述限位杆上开设有滑槽,所述滑槽被支撑架二贯穿,所述限位杆和托盘上相对安装有磁极相反的磁铁一,所述引导座上安装有磁铁二。
8、在一些实施例中,所述复位机构包括安装在机器人主体上的轴三,所述轴三上贯穿安装有齿轮,所述托盘底部开设有齿槽,所述齿轮与齿槽啮合,所述轴三上相对贯穿安装有绞盘,所述轴二上相对安装有套环二,所述绞盘上缠绕安装有钢绳二,所述钢绳二另一端与套环二连接。
9、在一些实施例中,所述餐盘吸附机构包括安装在机器人主体上的支撑架三,所述支撑架三上贯穿安装有筒二,所述托盘底部安装有支撑块,所述支撑块上安装有多级伸缩杆,所述多级伸缩杆顶端安装有活塞,所述活塞与筒二内壁贴合,还包括贯穿安装在托盘上的吸盘,所述吸盘与筒二之间导通安装有气管。
10、在一些实施例中,所述托盘、翻转平衡机构、控制机构、复位机构、餐盘吸附机构均有若干,且结构相同,且数量相同。
11、在一些实施例中,在托盘位于机器人主体内部时,所述钢绳一处于未绷直状态。
12、在一些实施例中,所述定滑轮上均安装有限位架。
13、在一些实施例中,所述引导座内壁均相对安装有滑杆,所述滚筒上开设有与之对应的缺口。
14、在一些实施例中,放置菜品的餐盘底部与吸盘对应部分为光滑面。
15、本发明至少具备以下有益效果:当托盘被拉出时,重物块会由原本中间位置转移至与拉出相反方向的位置,使机器人主体整体更加稳定,降低因菜品过重倾倒的风险,且当托盘推回去时,重物块重新恢复中间位置;
16、当托盘重新推至机器人主体内部时,托盘对餐盘底部进行吸附,进一步降低菜品输送中,菜品滑动甚至滑落的概率,且在托盘拉出的过程中,吸附力自动解除,方便对餐盘的拿取。
技术特征:
1.一种托盘式送餐机器人,包括机器人主体(1)和通过导轨安装在机器人主体(1)上托盘(2),还包括:
2.根据权利要求1所述的一种托盘式送餐机器人,其特征在于:所述翻转平衡机构(3)包括安装在机器人主体(1)上的引导座(31),所述引导座(31)上贯穿安装有轴一(32)和轴二(33),所述轴一(32)和轴二(33)两侧均安装有重物块(34),所述轴一(32)和轴二(33)上均安装有滚筒(35),所述引导座(31)上安装有支撑杆一(36),所述支撑杆一(36)上相对安装有定滑轮(37),所述机器人主体(1)上安装有支撑架一(38),所述轴一(32)上相对安装有套环一(39),所述托盘(2)上相对安装有钢绳一(310),所述钢绳一(310)另一端与套环一(39)连接,且期间均绕过支撑架一(38)和定滑轮(37)。
3.根据权利要求2所述的一种托盘式送餐机器人,其特征在于:所述控制机构(4)包括在引导座(31)上开设的凹槽一(41),所述引导座(31)上安装有支撑架二(42),所述支撑架二(42)上贯穿安装有限位杆(43),所述限位杆(43)上开设有滑槽(44),所述滑槽(44)被支撑架二(42)贯穿,所述限位杆(43)和托盘(2)上相对安装有磁极相反的磁铁一(45),所述引导座(31)上安装有磁铁二(46)。
4.根据权利要求3所述的一种托盘式送餐机器人,其特征在于:所述复位机构(5)包括安装在机器人主体(1)上的轴三(51),所述轴三(51)上贯穿安装有齿轮(52),所述托盘(2)底部开设有齿槽(53),所述齿轮(52)与齿槽(53)啮合,所述轴三(51)上相对贯穿安装有绞盘(54),所述轴二(33)上相对安装有套环二(55),所述绞盘(54)上缠绕安装有钢绳二(56),所述钢绳二(56)另一端与套环二(55)连接。
5.根据权利要求4所述的一种托盘式送餐机器人,其特征在于:所述餐盘吸附机构(6)包括安装在机器人主体(1)上的支撑架三(61),所述支撑架三(61)上贯穿安装有筒二(62),所述托盘(2)底部安装有支撑块(63),所述支撑块(63)上安装有多级伸缩杆(64),所述多级伸缩杆(64)顶端安装有活塞(65),所述活塞(65)与筒二(62)内壁贴合,还包括贯穿安装在托盘(2)上的吸盘(66),所述吸盘(66)与筒二(62)之间导通安装有气管(67)。
6.根据权利要求5所述的一种托盘式送餐机器人,其特征在于:所述托盘(2)、翻转平衡机构(3)、控制机构(4)、复位机构(5)、餐盘吸附机构(6)均有若干,且结构相同,且数量相同。
7.根据权利要求6所述的一种托盘式送餐机器人,其特征在于:在托盘(2)位于机器人主体(1)内部时,所述钢绳一(310)处于未绷直状态。
8.根据权利要求7所述的一种托盘式送餐机器人,其特征在于:所述定滑轮(37)上均安装有限位架(311)。
9.根据权利要求8所述的一种托盘式送餐机器人,其特征在于:所述引导座(31)内壁均相对安装有滑杆(312),所述滚筒(35)上开设有与之对应的缺口(313)。
10.根据权利要求9所述的一种托盘式送餐机器人,其特征在于:放置菜品的餐盘底部与吸盘(66)对应部分为光滑面。
技术总结
本发明涉及餐饮设备技术领域,具体为一种托盘式送餐机器人,包括机器人主体和通过导轨安装在机器人主体上托盘,还包括:翻转平衡机构,所述翻转平衡机构安装在机器人主体上,且与托盘连接,所述翻转平衡机构使托盘在拉出机器人主体时,向托盘拉出的反方向增加重量;此托盘式送餐机器人,区别于现有技术,当托盘被拉出时,重物块会由原本中间位置转移至与拉出相反方向的位置,使机器人主体整体更加稳定,降低因菜品过重倾倒的风险,且当托盘推回去时,重物块重新恢复中间位置;当托盘重新推至机器人主体内部时,托盘对餐盘底部进行吸附,进一步降低菜品输送中,菜品滑动甚至滑落的概率,且在托盘拉出的过程中,吸附力自动解除,方便对餐盘的拿取。
技术研发人员:贾娜,盛刚,韩猛,时吉贺,齐艳利,邢博文,王亚云,陈晓莹
受保护的技术使用者:陕西地建酒店管理集团有限责任公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!