一种采用斜拉索降低重力影响的柔性骨架连续型机械臂
本发明属于连续型机械臂,尤其涉及一种采用斜拉索降低重力影响的柔性骨架连续型机械臂。
背景技术:
1、连续型机械臂固有的超冗余特性能够在任务执行过程中更加灵活地适应环境,提高受限空间下的操作能力;另一方面,连续型机械臂的柔性驱动使其能够在物理上实现固有的柔顺特性,相比算法层面的柔性更加安全可靠,在与环境发生接触时可以显著降低安全风险。
2、现有的连续型机械臂在运动过程中,在水平操作时会受到重力影响,柔性骨架会在重力作用下产生较大的剪切变形,在理想驱动零位的构型下处于非对称状态,绳索驱动系统只能控制部分精度,无法在控制运动的同时对结构重力进行补偿,且控制精度不高。
技术实现思路
1、本发明的目的是提供一种采用斜拉索降低重力影响的柔性骨架连续型机械臂,以解决上述问题,斜拉索单元对结构重力进行补偿,提高柔性结构在重力场下抗剪切的能力。
2、为实现上述目的,本发明提供了如下方案:
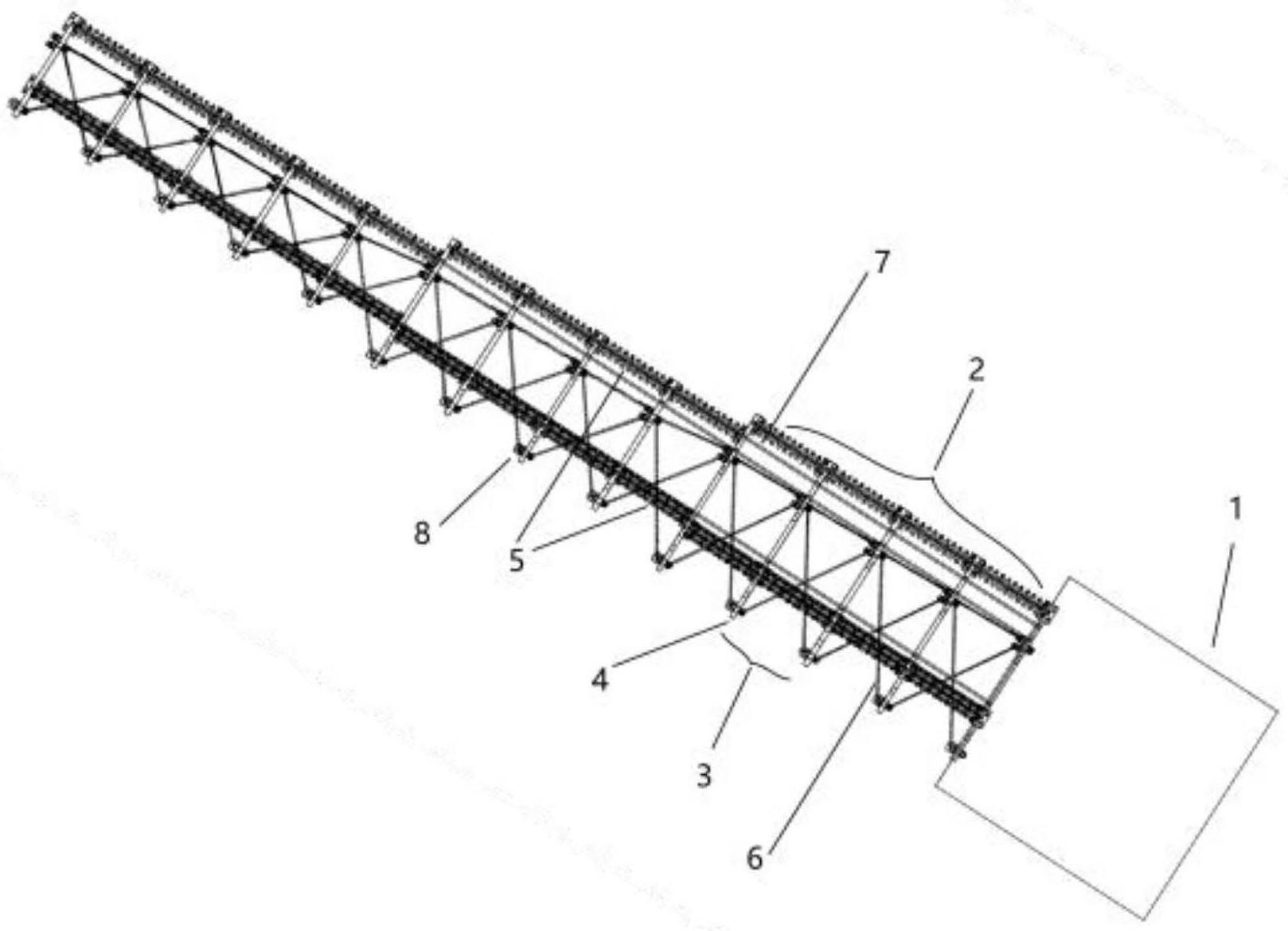
3、一种采用斜拉索降低重力影响的柔性骨架连续型机械臂,包括多个依次连接的驱动单元,位于一端的所述驱动单元连接有底座,所述驱动单元包括多个隔板,多个所述隔板沿所述驱动单元的长度方向等间隔设置,位于一端的所述隔板与所述底座固接,多个所述隔板均与柔性传动结构传动连接,相邻两所述隔板之间设置有斜拉索单元。
4、优选的,所述斜拉索单元包括若干斜拉索连接件,若干所述斜拉索连接件均固接在所述隔板上,所述斜拉索连接件位于所述隔板远离所述底座的一侧,所述隔板靠近所述底座的一侧固接有多个安装件,多个所述斜拉索连接件与多个所述安装件一一对应设置,相邻两所述隔板上的多个所述安装件、多个所述斜拉索连接件之间交叉穿设有张紧斜拉索,所述张紧斜拉索的两端固接在同一所述斜拉索连接件上。
5、优选的,所述柔性传动结构包括支撑组件和传动组件;
6、所述支撑组件包括若干柔性支撑骨架组,若干所述柔性支撑骨架组沿所述驱动单元的长度方向设置,所述柔性支撑骨架组位于相邻两个所述隔板之间,所述柔性支撑骨架组包括多个柔性支撑骨架,多个所述柔性支撑骨架沿所述隔板周向等间隔设置,所述柔性支撑骨架的两端分别与相邻的两所述隔板固接。
7、优选的,所述传动组件包括多个驱动绳,多个所述驱动绳周向等间隔设置,所述驱动绳沿所述驱动单元的长度方向设置,每个所述驱动单元内的一个所述隔板与所述驱动绳的一端固定连接,固定所述驱动绳的所述隔板远离所述底座,所述驱动绳的另一端穿过若干所述隔板伸入所述底座内,所述驱动绳同轴穿设在同一所述驱动单元的多个共轴的所述柔性支撑骨架内,多个驱动单元内的柔性支撑骨架不共轴。
8、优选的,远离所述底座的所述驱动单元上的所述隔板电性连接有传感器,所述隔板位于所述驱动单元远离所述底座的一端。
9、优选的,所述柔性支撑骨架组包括至少3个所述柔性支撑骨架。
10、与现有技术相比,本发明具有如下优点和技术效果:
11、本发明通过传动结构、隔板、斜拉索单元配合使用,提高连续型柔性机械臂的可控性,通过设置斜拉索单元,对连续型机械臂柔性骨架变形进行补偿,大幅提高柔性结构在重力场下抗剪切的能力,同时提高结构非可控自由度的刚度,解决了现有的连续型机械臂在操作过程中柔性结构受重力影响下剪切变形严重,无法在水平状态下使用的问题,使得机械臂可以更好地适应水平操作工况,提高了连续型柔性机械臂的应用场景范围。
技术特征:
1.一种采用斜拉索降低重力影响的柔性骨架连续型机械臂,其特征在于,包括多个依次连接的驱动单元(2),位于一端的所述驱动单元(2)连接有底座(1),所述驱动单元(2)包括多个隔板(4),多个所述隔板(4)沿所述驱动单元(2)的长度方向等间隔设置,位于一端的所述隔板(4)与所述底座(1)固接,多个所述隔板(4)均与柔性传动结构传动连接,相邻两所述隔板(4)之间设置有斜拉索单元(3)。
2.根据权利要求1所述的一种采用斜拉索降低重力影响的柔性骨架连续型机械臂,其特征在于,所述斜拉索单元(3)包括若干斜拉索连接件(8),若干所述斜拉索连接件(8)均固接在所述隔板(4)上,所述斜拉索连接件(8)位于所述隔板(4)远离所述底座(1)的一侧,所述隔板(4)靠近所述底座(1)的一侧固接有多个安装件(9),多个所述斜拉索连接件(8)与多个所述安装件(9)一一对应设置,相邻两所述隔板(4)上的多个所述安装件(9)、多个所述斜拉索连接件(8)之间交叉穿设有张紧斜拉索(6),所述张紧斜拉索(6)的两端固接在同一所述斜拉索连接件(8)上。
3.根据权利要求1所述的一种采用斜拉索降低重力影响的柔性骨架连续型机械臂,其特征在于,所述柔性传动结构包括支撑组件和传动组件;
4.根据权利要求3所述的一种采用斜拉索降低重力影响的柔性骨架连续型机械臂,其特征在于,所述传动组件包括多个驱动绳(7),多个所述驱动绳(7)周向等间隔设置,所述驱动绳(7)沿所述驱动单元(2)的长度方向设置,每个所述驱动单元(2)内的一个所述隔板(4)与所述驱动绳(7)的一端固定连接,固定所述驱动绳(7)的所述隔板(4)远离所述底座(1),所述驱动绳(7)的另一端穿过若干所述隔板(4)伸入所述底座(1)内,所述驱动绳(7)同轴穿设在同一所述驱动单元(2)的多个共轴的所述柔性支撑骨架(5)内,多个驱动单元(2)内的柔性支撑骨架(5)不共轴。
5.根据权利要求1所述的一种采用斜拉索降低重力影响的柔性骨架连续型机械臂,其特征在于,远离所述底座(1)的所述驱动单元(2)上的所述隔板(4)电性连接有传感器,所述隔板(4)位于所述驱动单元(2)远离所述底座(1)的一端。
6.根据权利要求3所述的一种采用斜拉索降低重力影响的柔性骨架连续型机械臂,其特征在于,所述柔性支撑骨架组包括至少3个所述柔性支撑骨架(5)。
技术总结
本发明属于连续型机械臂技术领域,特别是涉及一种采用斜拉索降低重力影响的柔性骨架连续型机械臂,包括多个依次连接的驱动单元,位于一端的所述驱动单元连接有底座,所述驱动单元包括多个隔板,多个所述隔板沿所述驱动单元的长度方向等间隔设置,位于一端的所述隔板与所述底座固接,多个所述隔板均与传动结构传动连接,相邻两所述隔板之间设置有斜拉索单元。本发明在使用时,通过设置斜拉索单元,对结构重力进行补偿,提高柔性结构在重力场下抗剪切的能力,避免柔性骨架在重力作用下产生剪切变形导致水平操作受到影响,同时提高了控制精度。
技术研发人员:李海泉,李佳龙,张立元,王清翟
受保护的技术使用者:北京科技大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!