一种绳索机器人及其路径规划方法和装置
本发明涉及路径规划领域,特别涉及一种绳索机器人及其路径规划方法和装置。
背景技术:
1、随着科技的不断进步和人们对工作效率的追求,自动化技术在各个领域发挥着重要作用。其中,搬运领域一直是工业生产中不可或缺的一环。然而,传统的搬运方式存在劳动强度大、效率低下等问题,因此,自动化开始在搬运领域得到应用。
2、绳索机器人以其独特的设计和先进的技术,为搬运领域带来了前所未有的突破和改进。它具有多项显著优势。首先,绳索机器人的设计灵活多变,可以根据不同工作场景个性化定制,以满足各类搬运需求。其次,绳索机器人采用了先进的感知技术和智能算法,能够实时感知周围环境、分析任务需求,并做出高效的决策,大幅提升搬运效率。此外,绳索机器人还具备高承重能力和稳定性,能够安全可靠地完成各类重型货物的搬运工作。因此,对于绳索机器人的研究越来越重要。
3、在绳索机器人的搬运任务中,轨迹规划是一项关键任务,规划出的轨迹质量直接影响后续控制效果。然而,传统的路径规划方法通常采用曲线拟合,将速度与路径紧密耦合,这使得速度规划难以综合考虑路径、时间和稳定性因素,导致效率较低。
4、有鉴于此,提出本技术。
技术实现思路
1、本发明公开了一种绳索机器人及其路径规划方法和装置,旨在使用将路径规划与速度规划先解耦,单独规划后,再耦合的方式,生成最优的轨迹,以提高吊装操作的效率和安全性。
2、本发明第一实施例提供了一种绳索机器人的路径规划方法,包括:
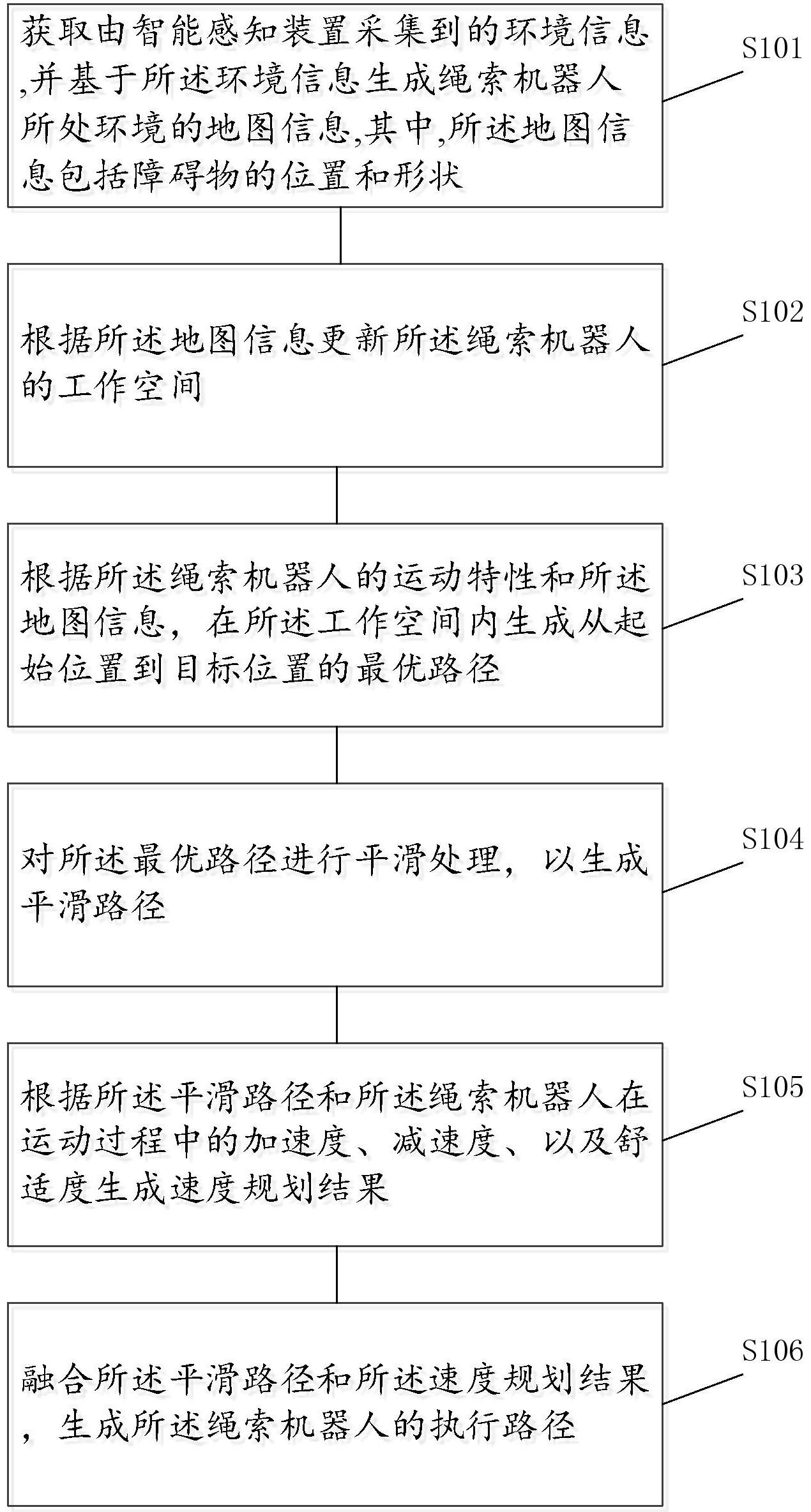
3、获取由智能感知装置采集到的环境信息,并基于所述环境信息生成绳索机器人所处环境的地图信息,其中,所述地图信息包括障碍物的位置和形状;
4、根据所述地图信息更新所述绳索机器人的工作空间;
5、根据所述绳索机器人的运动特性和所述地图信息,在所述工作空间内生成从起始位置到目标位置的最优路径;
6、对所述最优路径进行平滑处理,以生成平滑路径;
7、根据所述平滑路径和所述绳索机器人在运动过程中的加速度、减速度、以及舒适度生成速度规划结果;
8、融合所述平滑路径和所述速度规划结果,生成所述绳索机器人的执行路径。
9、优选地,所述获取由智能感知装置采集到的环境信息,并基于所述环境信息生成绳索机器人所处环境的地图信息,具体为:
10、配置栅格大小,将空间划分成多个小空间;
11、建立一个三维数组,接收智能感知装置发送过来的障碍物位置信息,并根据所述障碍物位置信息,调整三维数组位置的值,生成绳索机器人所处环境的地图信息。
12、优选地,所述根据所述地图信息更新所述绳索机器人的工作空间,具体为:
13、配置所述绳索机器人的滑轮的三个位置坐标分别为a1(x1,y1,z1),a2(x2,y2,z2),a3(x3,y3,z3),分别以a1、a2、a3为起点,连接所有障碍物,并延长线段直至接触地板,并将延长线段所经过位置的数值设置为1。
14、遍历所有障碍物,将障碍物下方的格子所代表的数组位置的数值改成1,生成绳索机器人的工作空间。
15、优选地,所述根据所述绳索机器人的运动特性和所述地图信息,在所述工作空间内生成从起始位置到目标位置的最优路径,具体为:
16、使用跳点搜索算法生成n个次优轨迹节点,从轨迹节点的最后一点开始判断,首先判断pn与pn-2之间是否有障碍物,其判断方法为:以pn与pn-2为节点,生成pn与pn-2为节点的线段函数,以单元栅格大小递进,遍历线段中的每一点,判断该点所在的栅格空间是否有障碍物;
17、在判断到pn与pn-2之间不存在障碍物,从轨迹节点中删除pn-1节点。继续判断pn与pn-3之间是否有障碍物;
18、在判断到pn与pn-2之间存在障碍物,停止判断pn,开始判断pn-1与pn-3之间是否有障碍物;
19、重复以上的步骤,直至将所有多余的点删除,生成所述绳索机器人在所述工作空间内生成从起始位置到目标位置的最优路径。
20、优选地,所述根据所述平滑路径和所述绳索机器人在运动过程中的加速度、减速度、以及舒适度生成速度规划结果,具体为:
21、计算被分割的平滑路径中每个小线段的长度,并将所述每个小线段的长度相加,得到整个曲线长度;
22、获取绳索机器人的速度信息,并基于所述速度信息和所述曲线长度确定匀加速段、匀减速段、变减速段、变加速段和匀速段,其中,所述速度信息包括速度上限、加速度上限、加加速度、初始速度、加速度、以及终点速度;
23、根据匀加速段和匀速段的时间和参数,生成时间数组;
24、根据所述时间数组的取值范围,分别计算在不同阶段的位移、速度、加速度和加加速度,并将其添加到对应的数组中。
25、优选地,所述融合所述平滑路径和所述速度规划结果,生成所述绳索机器人的执行路径,具体为:
26、建立一个新的轨迹列表用于存放融合轨迹;
27、根据时间数组,取出第一个时间值,计算其对应的速度、加速度、加加速度和路程长度;
28、根据所述路程长度与曲线的轨迹长度列表做匹配对比,在判断到路程长度存在于曲线长度列表中,获取所述路程长度代表的在原曲线位置的坐标,并根据所述原曲线位置的坐标与速度、加速度、加加速度融合组成第一轨迹信息,将所述第一轨迹信息配置在所述新的轨迹列表内;
29、在判断到路程长度不存在于曲线长度列表中,获取原曲线中与所述路程长度差距最小的两个路径值所代表的两个节点坐标,以这两个节点为端点构造一条线段,计算所述路程长度与较小的节点坐标所差的数值,在所构造的线段中取所述所差的数值所对应的点,计算所差的数值所对应的点的坐标,将所述所差的数值所对应的点的坐标与、速度、加速度、加加速度融合组成第一轨迹信息,将所述第一轨迹信息配置在所述新的轨迹列表内;
30、按照时间数组的顺序,将所有点的融合轨迹点一一确定,生成所述绳索机器人的执行路径。
31、本发明第二实施例提供了一种绳索机器人的路径规划装置,包括:
32、地图信息生成单元,用于获取由智能感知装置采集到的环境信息,并基于所述环境信息生成绳索机器人所处环境的地图信息,其中,所述地图信息包括障碍物的位置和形状;
33、工作空间更新单元,用于根据所述地图信息更新所述绳索机器人的工作空间;
34、最优路径生成单元,用于根据所述绳索机器人的运动特性和所述地图信息,在所述工作空间内生成从起始位置到目标位置的最优路径;
35、平滑路径生成单元,用于对所述最优路径进行平滑处理,以生成平滑路径;
36、速度规划结果生成单元,用于根据所述平滑路径和所述绳索机器人在运动过程中的加速度、减速度、以及舒适度生成速度规划结果;
37、执行路径生成单元,用于融合所述平滑路径和所述速度规划结果,生成所述绳索机器人的执行路径。
38、本发明第三实施例提供了一种绳索机器人,包括存储器以及处理器,所述存储器内存储有计算机程序,所述计算机程序能够被所述处理器执行,以实现如上任意一项所述的一种绳索机器人的路径规划方法。
39、基于本发明提供的一种绳索机器人及其路径规划方法和装置,获取由智能感知装置采集到的环境信息,并基于所述环境信息生成绳索机器人所处环境的地图信息,接着,根据所述地图信息更新所述绳索机器人的工作空间;再接着,根据所述绳索机器人的运动特性和所述地图信息,在所述工作空间内生成从起始位置到目标位置的最优路径;再接着,对所述最优路径进行平滑处理,以生成平滑路径;再接着,根据所述平滑路径和所述绳索机器人在运动过程中的加速度、减速度、以及舒适度生成速度规划结果;最后,融合所述平滑路径和所述速度规划结果,生成所述绳索机器人的执行路径,旨在作业要求下以安全无碰撞、平稳运行和最短时间为目标,生成最优路径,提高吊装操作的效率和安全性。
- 还没有人留言评论。精彩留言会获得点赞!