一种挂轨式输煤巡检机器人的制作方法
本发明涉及输煤廊道,特别涉及一种挂轨式输煤巡检机器人。
背景技术:
1、输煤廊道挂轨式巡检机器人主要以吊挂方式沿行走轨道巡检,行走轨道通常为架设在巷道顶部的h型钢或工字钢,巡检机器人通过行走轮吊挂在行走轨道上借助摩擦力进行矿山巷道的巡检工作,在机器人巡检的过程中,由于输煤廊道内部空气环境相对恶劣,煤粉浮沉含量高,由于轨道又长期暴露在外,久而久之会覆盖大量粉尘,轨道上的煤渣容易使机器人在运行时行走不顺,影响机器人正常巡检。
2、公开号为cn110488817b公开了一种输煤栈桥轨道式巡检机器人自动清灰装置,本发明通过包括安装座、万向连接组件、防偏转组件和毛刷组件;万向连接组件安装于安装座上,用于与输煤栈桥轨道式巡检机器人本体可拆卸式柔性连接;防偏转组件用于弹性夹持待清理轨道的底边以防止偏转,毛刷组件,包括安装块和一个以上的毛刷单元,毛刷单元安装于安装块上,安装块弹性安装于安装座上,基于上述方案,这种清灰装置并不够理想,由于轨道上的污物种类不同,常见的有煤灰或煤渣,对于较大的煤渣容易卡在轨道的内部,现有的毛刷组件对轨道上较大的煤渣清理效果较差,容易影响机器人正常巡检。
3、同时,清理组件清理下来的煤粉灰尘等杂物会落在机器人组件顶端,而煤粉灰尘在机器人组件顶端的积累容易使机器人组件产生故障,并且粉碎组件在进行轨道上的煤渣粉碎时,粉碎组件容易使轨道的表面刮花,进而使机器人组件在进行移动时不够稳定,受到轨道表面刮花毛刺的影响会对辅助轮和驱动轮形成损坏。
4、因此,通过一种挂轨式输煤巡检机器人来解决上述问题很有必要。
技术实现思路
1、本发明的目的在于提供一种挂轨式输煤巡检机器人,以解决上述背景技术中提出的问题。
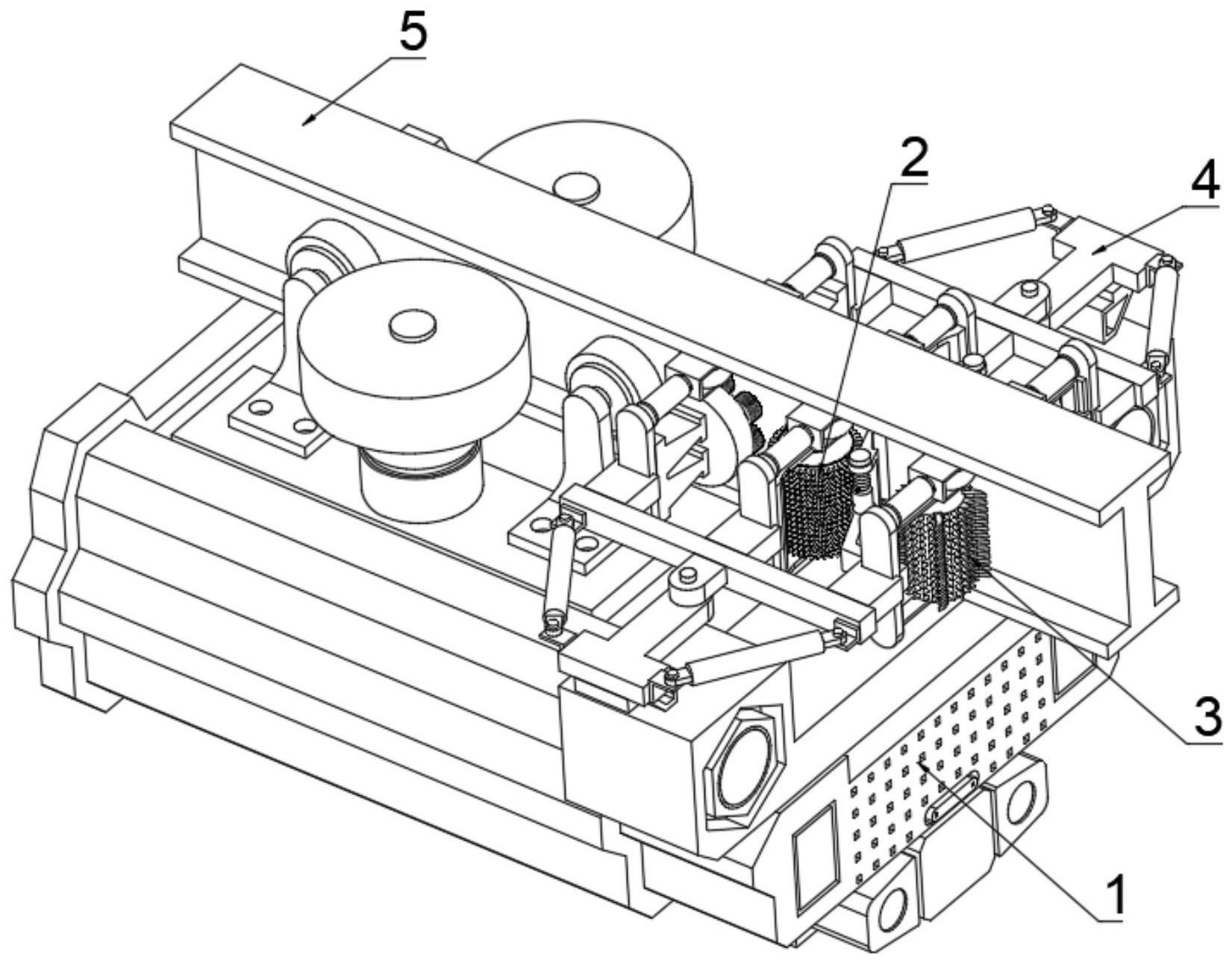
2、为实现上述目的,本发明提供如下技术方案:一种挂轨式输煤巡检机器人,包括机器人组件、清理组件、粉碎组件、调节导向组件和轨道,所述清理组件、粉碎组件和调节导向组件均设置于机器人组件的上方;
3、所述清理组件包括打磨刷、旋转清洁刷和清洁电机,所述打磨刷包括刷体外壳,所述刷体外壳上设置有滑杆,所述滑杆上转动设置有打磨软刷轮,所述滑杆的外侧设置有第一压力传感器,所述刷体外壳外侧设置有第一安装架,所述第一安装架上设置有转动电机,所述刷体外壳设置于转动电机的输出端,所述旋转清洁刷由清洁电机驱动旋转,所述打磨软刷轮中间设置有通道,所述通道内设置有扇叶;
4、所述粉碎组件包括粉碎辊和粉碎电机,所述粉碎辊的表面设置有粉碎齿和粉碎刀,所述粉碎辊外侧设置有凹槽,所述粉碎刀外部与凹槽底端之间设置有第一电子伸缩杆,所述粉碎辊由粉碎电机驱动旋转,所述粉碎刀与第一电子伸缩杆之间设置有第二压力传感器。
5、本发明通过设置第一压力传感器、第二压力传感器、第一电子伸缩杆和转动电机,使设备在使用时能够对刮花的轨道进行打磨清理,避免刮花的轨道上的毛刺对机器人组件的移动产生影响,并且设备能够根据轨道上的煤炭杂物的体积相应的选择使用粉碎齿或粉碎刀进行清理,同时清理组件在检测到轨道上的刮花严重时,会使粉碎刀缩回以减少因粉碎刀造成的轨道刮花,提高了设备使用的效果和使用的便捷性。
6、优选的,所述刷体外壳上设置有滑槽,所述滑杆位于滑槽内,所述刷体外壳的滑槽内设置有复位弹簧,所述打磨软刷轮与滑槽底部之间设置有波纹管,所述刷体外壳在滑槽底部位置设置有连通道,所述刷体外壳远离打磨软刷轮的一侧设置有收集袋,所述连通道与收集袋和打磨软刷轮的通道联通,所述第一安装架上设置有齿环,所述打磨软刷轮上设置有齿轮,所述第一安装架设置于第一刷架侧端。
7、优选的,所述粉碎辊的表面活动设置有第二安装架,所述第二安装架的表面固定设置有固定架,所述固定架的一端固定设置有第一固定杆,所述第一固定杆的两端均固定设置有扭簧。
8、优选的,所述扭簧的一端固定设置有转动臂,所述转动臂的一侧固定设置有刮板,所述粉碎刀的数量有多个,所述粉碎齿的数量有多个,且多个粉碎齿均匀设置于粉碎辊的外壁,所述粉碎齿设置为内大外小的锥形结构。
9、优选的,所述调节导向组件包括固定板,所述固定板设置于机器人组件上,所述固定板侧端设置有液压缸,所述液压缸的输出端铰接设置有支板,所述支板侧端设置有横板。
10、优选的,所述横板两侧与固定板两侧均铰接设置有第二电子伸缩杆,所述横板远离固定板的一侧设置有第二固定杆,所述第二固定杆远离横板一侧设置有导向板,所述清理组件和粉碎组件分别设置于导向板远离第二固定杆的一侧。
11、优选的,所述导向板的一端固定设置有导向座,所述导向座的一端固定设置有限位筒,所述导向座的表面中心位置固定设置有压缩弹簧,所述压缩弹簧的一端固定设置有导向杆,所述导向杆的一端固定设置有导向轮。
12、优选的,所述旋转清洁刷包括第二刷架,所述第二刷架上转动设置有旋转筒,所述旋转筒外侧设置有毛刷辊,所述毛刷辊外侧设置有毛刷刺,所述第二刷架上也设置有清洁电机用于驱动旋转筒的转动,所述复位弹簧的数量有多个,且多个复位弹簧呈环形均匀分布在刷体外壳的内部,所述复位弹簧固定设置于刷体外壳与滑杆之间,所述滑杆与刷体外壳相连接的位置开设有滑槽,且复位弹簧设置于滑槽内部。
13、优选的,所述机器人组件包括机器人本体,所述机器人本体的下方固定设置有摄像机,所述机器人本体的前端固定设置有视觉传感器,所述视觉传感器的两端均固定设置有支撑架,所述调节导向组件设置于支撑架的上方,所述机器人本体的上方固定设置有驱动座。
14、优选的,所述驱动座的数量有两个,且两个驱动座分别位于机器人本体的两侧,所述驱动座的表面固定设置有驱动电机,所述驱动电机的输出轴固定设置有驱动轮,所述驱动座的两端均固定设置有辅助支架,所述辅助支架的表面活动设置有辅助轮。
15、本发明的技术效果和优点:
16、1、本发明通过旋转清洁刷对轨道表面附着灰尘或较小的煤渣进行清除,通过打磨刷中的打磨软刷轮对轨道进行二次清理,从而对轨道表面浮动的灰尘或煤渣进行清除,通过打磨刷和旋转清洁刷两种不同的清理方式对轨道进行高效清理,当视觉传感器检测到轨道上有较大的煤渣时,通过粉碎齿以及粉碎刀的转动对较大的煤渣进行粉碎,然后刮板将轨道上粉碎过后的煤渣进行初步刮除,然后再经过清理组件进行清理,通过清理组件和粉碎组件之间相互配合,针对不同的情况对轨道上的煤灰或煤渣进行清理,从而保证机器人组件正常运行。
17、2、本发明通过设置调节导向组件对清理组件和粉碎组件的角度进行调节,通过设置限位筒、压缩弹簧和导向杆相互配合,灵活调节导向轮使其与轨道的弯道曲面贴合,根据轨道的不同弯度对清理组件和粉碎组件进行角度调节,从而使清理组件和粉碎组件在清理时与轨道的弯度相适配,避免清理不干净影响机器人组件在轨道上的正常运行。
18、3、本发明通过设置第一压力传感器、第二压力传感器、第一电子伸缩杆和转动电机,使设备在使用时能够对刮花的轨道进行打磨清理,避免刮花的轨道上的毛刺对机器人组件的移动产生影响,并且设备能够根据轨道上的煤炭杂物的体积相应的选择使用粉碎齿或粉碎刀进行清理,同时清理组件在检测到轨道上的刮花严重时,会使粉碎刀缩回以减少因粉碎刀造成的轨道刮花,提高了设备使用的效果和使用的便捷性。
- 还没有人留言评论。精彩留言会获得点赞!