一种多功能游乐场自动巡检机器人
本发明涉及机器人,尤其涉及一种多功能游乐场自动巡检机器人。
背景技术:
1、现在的游乐场常用的巡检方式为传统的人工巡检,其巡检人员通过感官判断是否存在一定的安全问题。但这种巡检方式存在如下缺点:巡检人员需要定期重复相同的工作,劳动强度大,工作效率低;并且巡检人员对游乐场安全问题的判断容易受到自己主观状态和精神状态的影响,且巡检质量参差不齐,导致人工成本高,管理成本高,效率较低。且游乐场的人流量较大,尤其是节假日,在人流量较大工作人员无法及时巡检的情况下,小朋友在游乐场中容易存在一定的安全隐患。
2、新型实用内容
3、本发明的目的在于提供一种多功能游乐场自动巡检机器人,旨在解决人工巡检效率不高的问题。
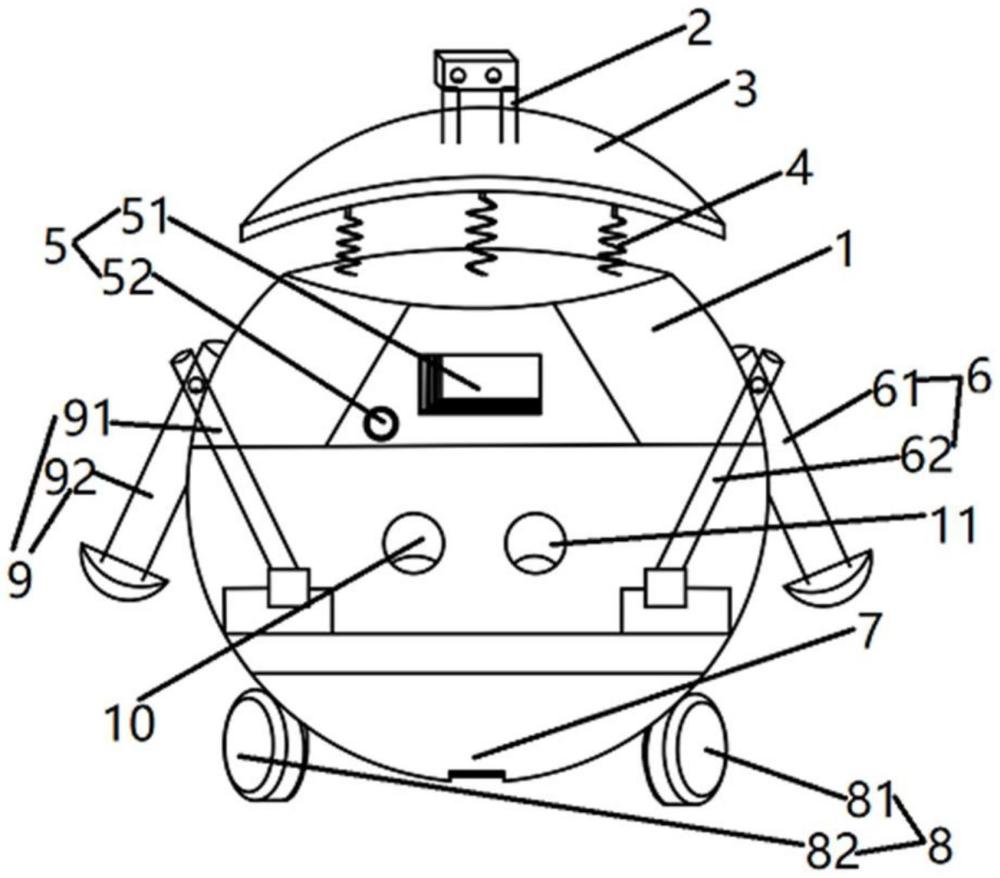
4、为实现上述目的,本发明提供了一种多功能游乐场自动巡检机器人,包括壳体,功能组件,转动轮组件,驱动轮组件,控制中心,机械臂,无线通信模块,图像采集组件,所述功能组件设置于壳体的外表面,所述转动轮组件与所述驱动轮组件位于壳体的下部,所述控制中心位于壳体内部,与无线通信模块相连,所述图像采集组件位于所述壳体顶部,所述机械臂与壳身支架相连,所述收纳槽位于壳身表面上部。该游乐场机器人可通过图像采集,声音采集组件及气体采集组件确保小朋友在游乐场的安全问题,以及通过收纳槽可与小朋友进行互动喂食以及提供所需日常用品。
5、所述功能组件采集环境信息,所述图像采集组件采集游乐场大型设施的工作情况及小朋友的安全问题,采集到的信息通过无线通信模块上传,所述控制中心规划所述多功能游乐场自动巡检机器人的行进路线,并通过驱动轮组件和转动组件控制机器人移动
6、所述机械臂包括第一连杆、第二连杆、第三连杆和第四连杆,所述第一连杆的一端与所述第二连杆连接,所述第三连杆的一端所述第四连杆相连,所述第二连杆与所述第四连杆放置于所述支撑板上进行固定。
7、所述机械臂通过连杆的转动,实现移动或前后摇摆,在工作时可以与游乐场小朋友进行互动。
8、所述运动机构包括两个主动轮和驱动电机,两个所述主动轮设置于所述壳体的两侧,所述主动轮通过所述驱动电机驱动。
9、所述壳体上方放置所述支撑板,所述支撑板上置有所述红外摄像头,其支撑板通过弹簧连接到壳体表面。
10、所述收纳槽嵌入所述壳体表面,所述收纳槽通过其左部按钮进行控制。
11、本发明的有益效果:所述功能组件采集环境信息,所述图像采集组件采集现场游乐设施的工作情况及小朋友的安全情况,采集到的信息通过无线通信模块上传,所述控制中心规划所述多功能游乐场自动巡检机器人的行进路线,并通过驱动轮组件和转动组件控制机器人移动,实现对整个游乐场的自动巡检,从而替代人工检查,提高了巡检效率。
技术实现思路
技术特征:
1.一种多功能游乐场自动巡检机器人,其特征在于,
2.根据权利要求1所述的一种多功能游乐场自动巡检机器人,其特征在于,
3.根据权利要求2所述的一种多功能游乐场自动巡检机器人,其特征在于,所述壳体上方设置支撑板,支撑板上置有摄像头,其支撑板通过弹簧连接到壳体表面,气体检测传感器和声音检测传感位于壳体表面;所述收纳槽嵌入所述壳体表面,所述收纳槽通过其左部按钮进行控制;所述机械臂通过所述第二连杆,第四连杆相连,其机械臂与连杆转动相连,控制机械臂的摆动,所述第二连杆,第四连杆通过支撑板进行固定。
技术总结
本发明公开了一种多功能游乐场自动巡检机器人,功能组件设置于壳体的外表面,转动组件与驱动组件位于壳体的下部,控制中心设置于壳体内部与无线通信模块相连,壳身表面具有收纳槽。功能组件采集外部环境信息,对游乐场小朋友的安全问题进行检测。将功能组件所采集的信息传输给控制中心进行决策。报警信息通过无线通信模块传输至控制平台,其控制中心规划该机器人的自动巡检路线。收纳槽内部可放置常用物品以及娱乐玩具,可通过按键进行取出或随机掉落。本发明提供的一种多功能游乐场自动巡检机器人,它能解决在游乐场人力不足的情况下小朋友的人身安全,本发明所提供的巡检方案,在一定程度上可以解决现有巡视效率低下的问题。
技术研发人员:伍锡如,土可心,刘金霞
受保护的技术使用者:桂林电子科技大学
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!