实现远程遥控的可移动式三自由度绳索重载并联机器人
本发明涉及起重机,具体涉及实现远程遥控的可移动式三自由度绳索重载并联机器人。
背景技术:
1、当前,随着我国经济高速发展,工业生产、基础设施建设、港口运输等领域对吊装需求量巨大,各个领域对吊装设备各方面的需求不断增强。传统吊装行业存在以下问题:1.作业过程不平稳;2.负重比低;3.吊载空间有限;4.吊载精度低;5.对操作人员要求高。
2、针对上述问题,绳牵引并联机器人应运而生。绳牵引并联机器人凭借其优越的机构特性,在搬运吊装领域得到了广泛应用;将绳驱并联机构应用于工业制造领域,可凭借其低成本、低惯量、大工作空间等优势,可很好兼顾传统搬运机器人负载低、速度慢、精度低等不足。
3、但是,现市面上存在的绳索机器人也有劣势,绳索机器人由立柱组成,立柱之间通过横梁和斜梁连接形成一个坚固的机架结构,每套立柱均由底座、柱体、万向钢丝滑轮组成,机架为固定式的结构,无法进行移动,则无法应对复杂地形的工况下的吊装搬运作业。
4、有鉴于此,提出本技术。
技术实现思路
1、有鉴于此,本发明的目的在于提供实现远程遥控的可移动式三自由度绳索重载并联机器人,能够有效解决现有技术中的绳索机器的机架为固定式的结构,存在无法进行移动,则无法应对复杂地形的工况下的吊装搬运作业的问题。
2、本发明公开了实现远程遥控的可移动式三自由度绳索重载并联机器人,包括:运动控制组件、电控柜、手柄接收器、无线传输组件、位置测量模块、以及执行组件;
3、其中,所述手柄接收器通过所述无线传输组件与所述运动控制组件无线连接,所述电控柜的输出端与所述运动控制组件的输入端、所述执行组件的输入端电气连接,所述运动控制组件的输出端与所述执行组件的输入端电气连接,所述运动控制组件的输入端与所述位置测量模块的输出端电气连接,所述运动控制组件的数据端用于与外部的远程控制终端无线连接;
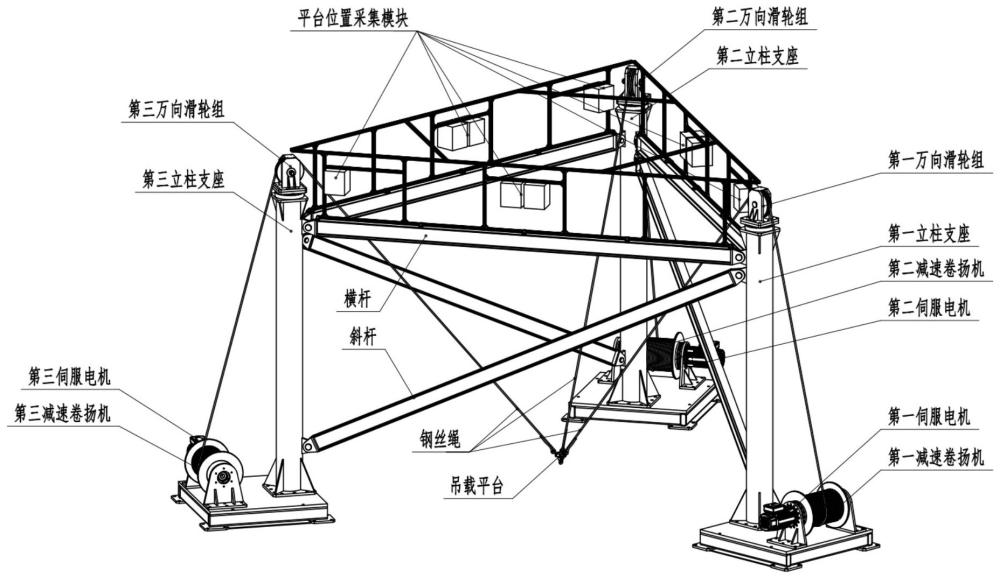
4、其中,所述执行组件包括吊载平台、钢丝绳组件、第一立柱支座、第二立柱支座、第三立柱支座、配置在所述第一立柱支座上端部的第一万向滑轮、配置在所述第一立柱支座底部的第一伺服电机和第一减速卷扬机、配置在所述第二立柱支座上端部的第二万向滑轮、配置在所述第二立柱支座底部的第二伺服电机和第二减速卷扬机、配置在所述第三立柱支座上端部的第三万向滑轮、配置在所述第三立柱支座底部的第三伺服电机和第三减速卷扬机、横杆组件、以及斜杠组件,所述第一立柱支座、所述第二立柱支座和所述第三立柱支座通过所述横杆组件、所述及斜杠组件进行固定连接,所述第一减速卷扬机、所述第二减速卷扬机和所述第三减速卷扬机通过所述斜杆组件和所述横杆组件连接组成一个工作空间,所述吊载平台通过所述钢丝绳组件可移动配置在所述工作空间中;
5、其中,所述运动控制组件被配置为通过执行其内部存储的计算机程序以实现如下步骤:
6、获取所述手柄接收器发送的已编码的操作指令信号,并对所述操作指令信号进行解码处理,生成可执行的控制指令;
7、获取配置在预设点位置上的所述位置测量模块测量到的所述执行组件中的三台吊车的第一具体位置信息;
8、调用建立好的机构运动学模型对所述控制指令和所述具体位置信息进行转换处理,生成转速控制信号;
9、将所述转速控制信号发送给所述执行组件的伺服电机,进行相应的转动,以带动所述吊载平台进行相应的移动;
10、获取所述位置测量模块测量到的所述执行组件中的三台吊车的第二具体位置信息,生成执行结果,并反馈至所述手柄接收器。
11、优选地,所述运动控制组件包括控制器和变频器,其中,所述控制器的输入端与所述手柄接收器的输出端、所述位置测量模块的输出端电气连接,所述控制器的输出端与所述变频器的输入端电气连接,所述变频器的输出端与所述执行组件的输入端电气连接,所述控制器的数据端用于与外部的远程控制终端无线连接。
12、优选地,所述位置测量模块为全站仪。
13、优选地,获取配置在预设点位置上的所述位置测量模块测量到的所述执行组件中的三台吊车的第一具体位置信息,具体为:
14、确保移动后的所述执行组件中的吊车稳定停放在平坦的地面上;
15、根据吊车的角度和位置,调整所述无线传输组件的仰角和方位角,使其可以覆盖到吊车所在的区域;
16、调用所述无线传输组件对吊车附近的预设测量点进行观测,获取观测数据;
17、使用三角测量方法或三角定位方法对所述观测数据和所述预设测量点的坐标进行数据处理和坐标计算,生成第一具体位置信息。
18、优选地,在调用建立好的机构运动学模型对所述控制指令和所述具体位置信息进行转换处理之前,还包括:
19、根据勾股定理、反正弦函数、余弦定理和对方余弦函数对预设参数进行计算,求得实际期望绳长;
20、对所述实际期望绳长进行时间微分处理,得到绳索速度与末端执行器速度的关系,并建立机构运动学模型。
21、优选地,根据勾股定理、反正弦函数、余弦定理和对方余弦函数对预设参数进行计算,求得实际期望绳长,具体为:
22、根据勾股定理和反正弦函数求得,其中,万向轮中心为o,万向轮半径为r,b为滑轮的入绳点,c为滑轮的出绳点,p为绳索与负载平台的铰接点,理想绳长是pb;
23、根据余弦定理和对方余弦函数求得;
24、根据公式和求得角度实际变化和;
25、根据公式和求得实际变化绳长。
26、优选地,对所述实际期望绳长进行时间微分处理,得到绳索速度与末端执行器速度的关系,具体为:
27、对所述实际变化绳长进行时间微分,得到绳长速度的变化,公式为,其中,为绳索速度;
28、再将绳索速度通过对时间求微分得到绳索加速度的变化,公式为,其中,为绳索加速度;
29、根据公式得到绳索速度与末端执行器速度的关系,其中,为绳索的速度变化,为三根绳索分别对末端执行器规划的x、y、z三个方向轨迹求导的3*3系数的雅可比矩阵,为末端执行器的速度变化。
30、优选地,调用建立好的机构运动学模型对所述控制指令和所述具体位置信息进行转换处理,生成转速控制信号,具体为:
31、根据公式计算电机输出轴转过的角度,公式为,其中,是第根绳的初始长度;
32、对电机输出轴转过的角度进行求导可得,;
33、将电机输出轴转过的角度的导代入绳索速度与末端执行器速度的关系式中,求得电机转速信号,公式为。
34、优选地,还包括pid控制器和smith预估器,其中,所述pid控制器和所述smith预估器与所述运动控制组件电气连接。
35、优选地,还包括:
36、当检测到所述运动控制组件处于通讯过程中时,采用所述pid控制器进行位置闭环控制;
37、调用所述smith预估器的smith预估算法来对滞后特性动态补偿进行控制。
38、综上所述,本实施例提供的实现远程遥控的可移动式三自由度绳索重载并联机器人,其吊车可以通过电手柄等手段进行远程遥控移动,实现在大范围、多地形以及恶劣环境下进行物体的吊装,还可以进行快速地组装和拆卸。保护整套无线网络控制三台吊车协同进行吊装作业的流程;从而解决现有技术中的牵引并联机器人由立柱组成,立柱之间通过横梁和斜梁连接形成一个坚固的机架结构,每套立柱均由底座、柱体、万向钢丝滑轮组成,机架为固定式的结构,无法进行移动,则无法应对复杂地形的工况下的吊装搬运作业的问题。
- 还没有人留言评论。精彩留言会获得点赞!