一种异形结构芯模编织过程的纱线轨迹预测方法及系统
本发明涉及编织,具体为一种异形结构芯模编织过程的纱线轨迹预测方法及系统。
背景技术:
1、编织技术为织造复合材料预成型体的重要工艺,在汽车制造、医疗器械、航空航天等领域中,编织复合材料已经得到广泛应用,但是仍存在大尺寸构件编织误差大、覆盖率不均匀等行业内急需解决的问题。
2、针对大尺寸异形结构芯模,由于其结构的复杂性,需要使用机器人牵引芯模按照一定轨迹进行编织,轨迹影响到织物的编织角、覆盖率等重要工艺参数,直接影响到复合材料成品的力学性能。编织过程中更改牵引速度与主机速度或者更换导向环尺寸会形成不同性能的复合材料预成型体,故需要纱线轨迹预测模型来预测不同编织情况下纱线在芯模表面的分布,在实际生产中可以提高生产效率。
技术实现思路
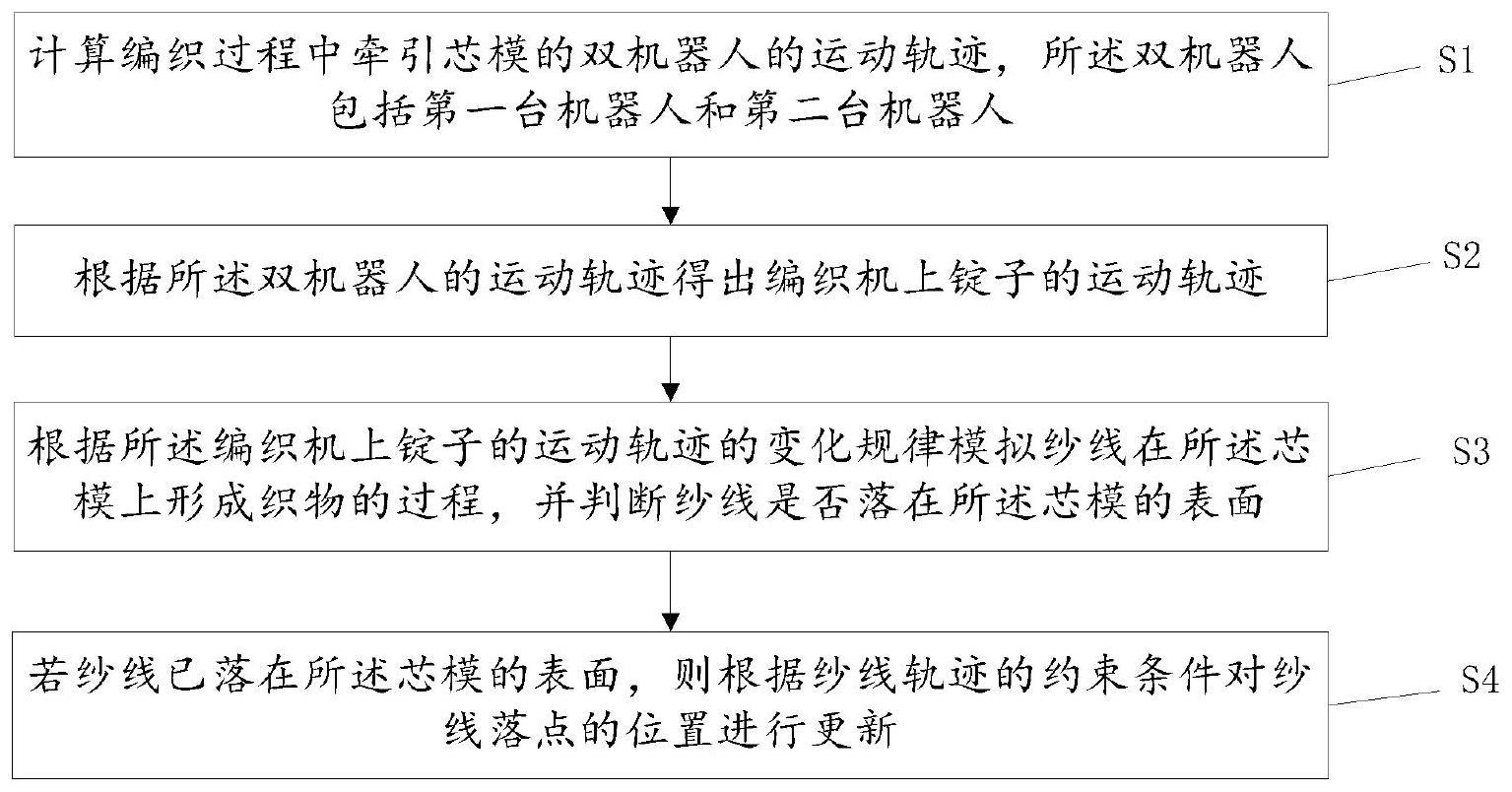
1、针对现有方法的不足以及实际应用的需求,为了实现对异形结构芯模编织过程纱线轨迹的精确预测。本发明提供了一种异形结构芯模编织过程的纱线轨迹预测方法,方法包括如下步骤:计算编织过程中牵引芯模的双机器人的运动轨迹,所述双机器人包括第一台机器人和第二台机器人;根据所述双机器人的运动轨迹得出编织机上锭子的运动轨迹;根据所述编织机上锭子的运动轨迹的变化规律模拟纱线在所述芯模上形成织物的过程,并判断纱线是否落在所述芯模的表面;若纱线已落在所述芯模的表面,则根据纱线轨迹的约束条件对纱线落点的位置进行更新。本发明通过异形结构芯模编织过程的纱线轨迹预测方法,预测编织过程中纱线落点变化,计算纱线在芯模表面的分布及预成型体编织角的大小,对异形结构芯模编织过程的纱线轨迹进行预测,提高编织效率,在相同条件下,提升编织复合材料的力学性能。
2、可选地,所述计算编织过程中牵引芯模的双机器人的运动轨迹包括以下步骤:在三维运动空间中,分别建立关于所述第一台机器人的基坐标系和工具坐标系和关于所述第二台机器人的基坐标系和工具坐标系;对所述芯模进行离散化处理得到多段离散芯模,在所述第一台机器人的工具坐标系和所述第二台机器人的工具坐标系下描述所述芯模的中心线和所述芯模的形状;计算所述第一台机器人的轨迹,并保证任意一段所述离散芯模垂直通过编织平面;利用所述第一台机器人的基坐标系和所述第二台机器人的基坐标系中位置关系的几何约束条件,计算所述第二台机器人的轨迹。本发明通过计算编织过程中牵引芯模的双机器人的运动轨迹确定编织机上锭子的运动轨迹,有利于编织过程中纱线轨迹的预测。
3、可选地,所述根据所述双机器人的运动轨迹得出编织机上锭子的运动轨迹包括:在所述芯模的端面建立一个三维坐标系;将所述双机器人的运动轨迹作为所述芯模的运动轨迹;根据相对运动关系将编织过程中所述芯模穿过编织平面转换为编织平面及编织机穿过所述芯模,得出编织机上锭子的运动轨迹。本发明通过编织过程中的相对运动关系,将芯模穿过编织平面的过程转换为编织平面及编织机穿过芯模,简化了纱线轨迹预测的计算过程。
4、可选地,所述编织机上锭子的运动轨迹满足如下公式:
5、
6、其中,qi,j为第i个载体在tj时刻下的空间位置;qj为中线上离散点;rot为旋转矩阵;tj为qj对应的单位切向量;zm为芯模端面坐标系中z轴对应的方向向量;rsp为线轴出口平面的半径;θi,j为tj时刻下第i个载体在编织机上的角度位置。
7、可选地,所述判断纱线是否落在所述芯模的表面包括:根据几何关系得出纱线与编织机上导向环的交点;根据纱线与编织机上导向环的交点、已知落点及法向量的几何位置确定纱线是否已经落在所述芯模的表面,其中,所述已知落点为纱线在所述芯模上表面已知的落点,所述法向量为所述已知落点所在的三角面片上指向所述芯模外侧的法向量。
8、可选地,所述判断纱线是否落在所述芯模的表面的条件满足如下公式:
9、nm·(gi,j-pi,j)≤0
10、其中,nm为纱线落点所在三角形面片上指向芯模外侧的法向量;gi,j为第i个纱线与编织机上导向环的交点在tj时刻下的空间位置,pi,j为第i个纱线落点在tj时刻下的空间位置。
11、可选地,所述异形结构芯模编织过程的纱线轨迹预测方法包括:设定所述纱线轨迹的约束条件,所述约束条件为:
12、定义纱线落点所在的三角面片为f,纱线在三角面片f上的轨迹方向为向量(gi,j-pi,j)在三角面片f上投影的方向,长度为所述已知落点到所述三角面片边界的长度。
13、可选地,所述若纱线已落在所述芯模的表面,则根据纱线轨迹的约束条件对纱线落点的位置进行更新,满足如下公式:
14、
15、其中,p′为落点更新后的空间位置;p为已知落点的空间位置;(gi,j-pi,j)f为纱线在三角面片f上投影;mf和m′f为三角面片f上纱线指向的边缘所对应的两个顶点;nd为三角面片f上纱线所指向的边缘线与三角面片f的法向量nf所形成平面的法向量,nd的表达式如下:
16、
17、可选地,所述异形结构芯模编织过程的纱线轨迹预测方法还包括:计算编织后的预成型体的编织角大小;所述计算编织后的预成型体的编织角大小,满足如下公式:
18、
19、其中,θ为编织角,是单根纱线与芯模中心线所形成的夹角;rg为编织机上导向环的半径;r为芯模半径;h为编织平面与编织机上导向环平面的直线距离。
20、第二方面,为能够高效地执行本发明所提供的一种异形结构芯模编织过程的纱线轨迹预测方法,本发明还提供了一种异形结构芯模编织过程的纱线轨迹预测系统,系统包括处理器、输入设备、输出设备和存储器,所述处理器、输入设备、输出设备和存储器相互连接,其中,所述存储器用于存储计算机程序,所述计算机程序包括程序指令,所述处理器被配置用于调用所述程序指令,执行如本发明第一方面所述的异形结构芯模编织过程的纱线轨迹预测方法。本发明的异形结构芯模编织过程的纱线轨迹预测系统,结构紧凑、性能稳定,能够稳定地执行本发明提供的异形结构芯模编织过程的纱线轨迹预测方法,提升本发明整体适用性和实际应用能力。
技术特征:
1.一种异形结构芯模编织过程的纱线轨迹预测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的异形结构芯模编织过程的纱线轨迹预测方法,其特征在于,所述计算编织过程中牵引芯模的双机器人的运动轨迹包括以下步骤:
3.根据权利要求1所述的异形结构芯模编织过程的纱线轨迹预测方法,其特征在于,所述根据所述双机器人的运动轨迹得出编织机上锭子的运动轨迹包括:
4.根据权利要求3所述的异形结构芯模编织过程的纱线轨迹预测方法,其特征在于,所述编织机上锭子的运动轨迹满足如下公式:
5.根据权利要求1所述的异形结构芯模编织过程的纱线轨迹预测方法,其特征在于,所述判断纱线是否落在所述芯模的表面包括:
6.根据权利要求1所述的异形结构芯模编织过程的纱线轨迹预测方法,其特征在于,所述判断纱线是否落在所述芯模的表面的条件满足如下公式:
7.根据权利要求1所述的异形结构芯模编织过程的纱线轨迹预测方法,其特征在于,所述异形结构芯模编织过程的纱线轨迹预测方法包括:
8.根据权利要求1所述的异形结构芯模编织过程的纱线轨迹预测方法,其特征在于,所述若纱线已落在所述芯模的表面,则根据纱线轨迹的约束条件对纱线落点的位置进行更新,满足如下公式:
9.根据权利要求1所述的异形结构芯模编织过程的纱线轨迹预测方法,其特征在于,所述异形结构芯模编织过程的纱线轨迹预测方法还包括:
10.一种异形结构芯模编织过程的纱线轨迹预测系统,其特征在于,系统包括处理器、输入设备、输出设备和存储器,所述处理器、输入设备、输出设备和存储器相互连接,其中,所述存储器用于存储计算机程序,所述计算机程序包括程序指令,所述处理器被配置用于调用所述程序指令,执行如权利要求1-9任一项所述的异形结构芯模编织过程的纱线轨迹预测方法。
技术总结
本发明涉及编织技术领域,具体为一种异形结构芯模编织过程的纱线轨迹预测方法,方法包括如下步骤:计算编织过程中牵引芯模的双机器人的运动轨迹;根据所述双机器人的运动轨迹得出编织机上锭子的运动轨迹;根据所述编织机上锭子的运动轨迹的变化规律模拟纱线在所述芯模上形成织物的过程,并判断纱线是否落在所述芯模的表面;若纱线已落在所述芯模的表面,则根据纱线轨迹的约束条件对纱线落点的位置进行更新。本发明通过建立异形结构芯模编织过程的纱线轨迹预测模型,预测编织过程中纱线落点变化,计算纱线在芯模表面的分布及预成型体编织角的大小,对异形结构芯模编织过程的纱线轨迹进行预测,提高编织效率。
技术研发人员:俞建勇,闫红霞,孟婥,李麒阳,郗欣甫
受保护的技术使用者:东华大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!