一种自主反馈及快速变形的机器人执行器
本发明属于机器人执行器的外部感知反馈并自动调节的领域,具体是涉及一种自主反馈及快速变形的机器人执行器。
背景技术:
1、机器人执行器是机器人的重要组成部分,它是机器人作业的“臂膀”。机器人在作业过程中,通常利用视觉传感器进行外部感知,然后通过执行器完成作业。机器人的作业水平高度依赖传感器的反馈。但是,这存在一些弊端,例如在需要触觉反馈的场合,视觉传感器往往难以提供精确的信息反馈。例如,当机器人执行器需要感知外部接触面的倾斜度或者感知行程是否匹配时,视觉传感器往往难以提供有效信息。以上问题,很大程度上限制了机器人的应用。
技术实现思路
1、为了解决背景技术中存在的问题,本发明提供了一种自主反馈及快速变形的机器人执行器。执行器可自主感知并反馈接触面的形状和接触压力,以此实现对接触面形状的顺应作业,同时可以自主调整工作行程。用于机器人作业时,实时反馈机器人的外部接触面的形状和接触压力,并据此自动改变执行器的形状,自动顺应外部接触面的形状,同时可以自动调整执行器的工作行程。这可以有效解决机器人作业时,触觉感知受限的问题。
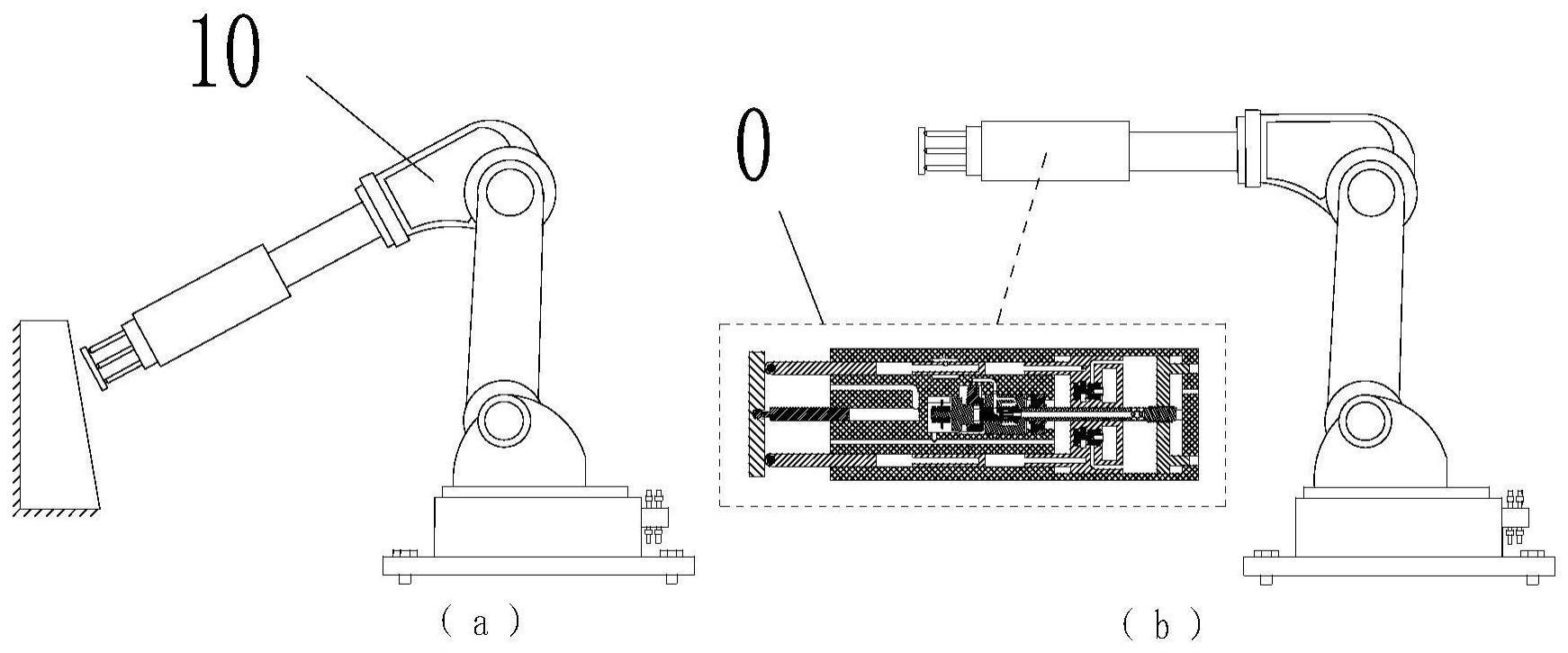
2、为了解决上述问题,本发明的技术方案是:本发明机器人包括安装在臂端的执行器,所述执行器用于在机器人臂作业时对外部接触的压力和形状进行感知反馈,自动缩短/伸长,从而实现机器人更精准地作业。
3、所述的执行器包含了壳体、位于壳体内的倾斜调节结构、缩短调节结构、伸长调节结构以及分别位于壳体前后端的传动杆件、调节板;壳体的后部内设置有调节腔,调节腔后端经壳体后端面的通孔和外界大气连通;壳体的前部内设置有多个圆柱孔和一个导向孔,导向孔位于中心,多个圆柱孔位于导向孔的周围且沿周向间隔均布,多个圆柱孔以每两个对称布置在壳体中心轴向两侧的圆柱孔为一对而分为多对,圆柱孔和导向孔的前端均贯穿出壳体前端面,圆柱孔的后端连通于调节腔;调节腔内从前到后依次安装有倾斜调节结构和调节板,倾斜调节结构前端部伸入到各个圆柱孔中,调节板仅能在调节腔内轴向移动而无法旋转移动;壳体的中部内设有中心腔,中心腔后端连通于调节腔,中心腔中安装有缩短调节结构和伸长调节结构,缩短调节结构和伸长调节结构的一端伸出中心腔后再贯穿过倾斜调节结构后和调节板连接;传动杆件位于壳体的前端用于接触输出作用压力,且传动杆件其中一部分伸入到圆柱孔和导向孔中轴向活动,进而带动圆柱孔中的压力变化传递到倾斜调节结构、缩短调节结构、伸长调节结构。
4、所述的传动杆件包括撞击盘、多个传动柱、多个隔离柱、导向柱和多个导向磁铁;撞击盘前端面用于接触外作用表面、感知接收外作用表面的倾斜度;撞击盘后端面的中心和导向柱前端铰接,导向柱后端可轴向移动地密封插装到导向孔中;每个传动柱的前端和撞击盘后端面接触连接,每个传动柱的前端部内嵌装有用于和磁性材料的撞击盘磁性吸附的导向磁铁,各个传动柱后端可轴向移动地密封插装到各自对应的圆柱孔中,每个圆柱孔内的中部可轴向活动地密封插装有隔离柱,隔离柱在朝向前方的前端面开设盲孔作为隔离柱内腔;所述的倾斜调节结构和调节板的外周面均与调节腔的腔壁密封连接,通过以倾斜调节结构和调节板分隔将调节腔从前到后依次分为空气腔、压力腔、自由腔;隔离柱外周面和圆柱孔孔壁之间密封连接,通过以隔离柱分隔将圆柱孔分为前方的压缩腔和后方的传动腔;所述缩短调节结构和伸长调节结构在装入中心腔时,在和中心腔后端腔壁之间形成相对密封,使得中心腔前端腔空间形成相对独立的运动腔。本发明方案中,导向孔、运动腔、空气腔、自由腔等均和外界大气连通;压缩腔、传动腔、压力腔不和外界大气连通,是一个相对封闭的腔,且压缩腔充满可压缩气体为气腔,传动腔、压力腔充满油液为油腔。
5、所述的倾斜调节结构包括滑动壳和至少一个开关推杆泄压机构,滑动壳密封装在调节腔中且一端伸入到圆柱孔中,开关推杆泄压机构安装在滑动壳中;所述的滑动壳主要由滑动壳盘体和滑动壳柱体构成,滑动壳盘体的前端面固定连接有多个滑动壳柱体,多个滑动壳柱体以每两个对称布置在滑动壳盘体前端面中心两侧的滑动壳柱体为一对而分为多对,滑动壳盘体可轴向移动地密封安装在调节腔中,多个滑动壳柱体分别可轴向移动地密封安装在壳体的各个圆柱孔中,每个滑动壳柱体内开设有滑动壳柱体内腔,滑动壳柱体内腔的前端贯穿出滑动壳柱体且和圆柱孔连通;滑动壳盘体内部安装有至少一个开关推杆泄压机构,每个开关推杆泄压机构包括一个开关推杆组件以及开设在滑动壳盘体上的一个密封腔、一个真空腔,密封腔和真空腔沿滑动壳盘体沿轴向从前到后依次布置且相互连通;开关推杆组件安装在密封腔上,每个开关推杆组件包括一个开关轴和位于开关轴两侧的推杆,开关轴的两端均通过轴承可旋转地安装在密封腔;开关轴的两端之间从前端到后端依次设置细轴段和密封轴段,密封轴段外周面和密封腔的内壁密封配合;细轴段所在的外周面和密封腔的内壁之间具有环状腔,细轴段外周一侧固定连接有径向布置的摆动杆,摆动杆在环状腔内可随开关轴的细轴段旋转摆动;摆动杆摆动两侧的滑动壳盘体内部均分别设置一个条形运动通道,两个条形运动通道平行布置,每个条形运动通道中均密封安装有一个推杆,每个条形运动通道的一端和环状腔连通,另一端经各自对应的内部孔道和滑动壳柱体内腔后端连通,推杆在条形运动通道中可滑动进而推动摆动杆摆动;每个开关推杆泄压机构的开关推杆组件中摆动杆摆动两侧的条形运动通道分别连通到一对滑动壳柱体各自的滑动壳柱体内腔后端。
6、所述的开关推杆组件的开关轴均设置有和滑动壳盘体的真空腔配合的预警泄压结构,所述的预警泄压结构包括开设在滑动壳盘体内部的泄压通道以及设置在开关轴的密封轴段上的开关轴内腔、开关孔;开关轴的密封轴段在朝向真空腔端面开设有开关轴内腔,开关轴内腔和真空腔直接连通,开关轴的密封轴段中部侧壁开设有多个沿同一圆周均布的开关孔,每个开关孔的内端和开关轴内腔连通,每个开关孔的外端被滑动壳盘体的密封腔壁面密闭,多个开关孔所在圆周上任意一处的密封腔壁面上开设和真空腔连通的泄压通道。
7、所述的缩短调节结构包括调节轴和调短组件;调节轴位于壳体的中心轴线上,调节轴一端伸入位于中心腔内,调节轴另一端穿出中心腔伸入到调节腔中又穿过倾斜调节结构和调节板的中心孔螺纹套装连接;调节轴中部在穿设过中心腔时和中心腔后端的内壁之间密封连接、且通过轴承可旋转地支撑连接,使得中心腔前部形成相对封闭的运动腔,运动腔内的调节轴内部安装调短组件;位于倾斜调节结构和调节板之间的压力腔内的调节轴外周壁上开设有径向的流体孔,调节轴内部中心轴向开设有中心流体孔道,中心流体孔道后端经流体孔和压力腔连通,前端连通到调短组件内进而驱动调短组件带动调节轴旋转运动,进而带动调节板和传动杆件的向后端移动实现缩短。
8、所述的调节轴整体呈阶梯轴结构,且从前端到后端依次分为末端段、离合段、阀轴段、长轴段、螺纹段的五段;螺纹段设置有外螺纹,螺纹段的外螺纹通过螺纹套装在调节板的中心孔中;长轴段前部通过轴承可旋转地套装在中心腔后端中,长轴段内部中心轴向开设有中心流体孔道,靠近螺纹段处的长轴段后端开设有流体孔;阀轴段密封地套装在中心腔中,阀轴段内部设置和中心流体孔道前端连通的内腔和流道,离合段在靠近阀轴段的后端设置有条形通槽,阀轴段内腔和流道以及离合段的条形通槽中安装有调短组件。
9、所述的调短组件包括大单向阀、小单向阀和拨杆轴套;所述的调节轴的阀轴段中心沿轴向从前端到后端依次开设有小腔、大腔,小腔和大腔同轴连通,大腔和中心流体孔道连通;所述的调节轴的离合段在靠近阀轴段的后端中间开设有上下贯通的条形通槽,条形通槽、小腔和大腔构成的空间内安装有仅允许从后向前导通的大单向阀,大单向阀内安装有仅允许从前向后导通的小单向阀,离合段在靠近末端段的端部设有外凸缘,外凸缘和条形通槽之间的离合段上活动套装有拨杆轴套;外凸缘后台阶面和拨杆轴套前端面之间在紧贴接触时形成同轴旋转地啮合配合连接;所述的大单向阀包括大t形阀和大弹簧,大t形阀的小端安装在小腔和大腔中,大t形阀的大端安装在条形通槽仅可沿条形通槽轴向移动,大t形阀小端的最末端固定设有环形凸缘,小腔和大腔之间的台阶面和环形凸缘之间连接有大弹簧,大弹簧也套装在大t形阀小端外;大t形阀内部中心沿轴向从前端到后端依次开设有小阀腔和轴向通道,小阀腔和轴向通道连通,轴向通道和中心流体孔道同轴直接连通,小阀腔内安装有小单向阀;在小阀腔前端面的所述大t形阀内设置有直角通道,直角通道一端连通于小阀腔,另一端经直角弯折后从大t形阀侧壁贯穿出;所述的小单向阀包括小t形阀和小弹簧,小t形阀的小端安装在轴向通道中,小t形阀的大端安装在小阀腔中并堵塞顶接到小阀腔前端面和直角通道之间的连通处,小t形阀的大端和小端之间的台阶面和小阀腔的后端面之间连接有小弹簧,小弹簧也套装在小t形阀小端外;小t形阀的小端内设置有单向阀内腔,小t形阀的小端在靠近大端的侧壁开设径向的流体孔,单向阀内腔后端和轴向通道同轴直接连通,单向阀内腔前端经流体孔和小阀腔连通。
10、所述的拨杆轴套主要有环形部和固定连接在环形部一侧上的拨杆构成,拨杆具有磁性,环形部套装在调节轴的离合段上,拨杆周围所在的运动腔内一侧设置有用于拨杆轴套转动和拨杆摆动的弧形的拨杆空间,运动腔内的另一侧设置有弧形的缩短运动孔道,缩短运动孔道中部内密封地安装有弧形推杆,缩短运动孔道在靠近拨杆的一端直接连通到拨杆空间,另一端用于连通到大腔和直角通道;且在缩短运动孔道靠近拨杆一端的两侧的离合段内部嵌装有两个用于磁性吸附拨杆轴套上拨杆的拨杆磁铁;同时所述阀轴段内部开设径向流体通道和过渡流体通道,小腔内的大t形阀的直角通道另一端和径向流体通道的一端连通,大腔后端经过渡流体通道和径向流体通道的中部连通,径向流体通道另一端贯穿出阀轴段外壁;径向流体通道贯穿出阀轴段外壁的端口所在的中心腔腔壁内圆周面上开设有环形腔,环形腔经壳体内部开设的缩短连通孔道和缩短运动孔道另一端连通。
11、所述的伸长调节结构包括调节轴和调长组件;调节轴位于壳体的中心轴线上,调节轴一端伸入位于中心腔内,调节轴另一端穿出中心腔伸入到调节腔中又穿过倾斜调节结构和调节板的中心孔螺纹套装连接;调节轴中部在穿设过中心腔时和中心腔后端的内壁之间密封连接、且通过轴承可旋转地支撑连接,使得中心腔前部形成相对封闭的运动腔,运动腔内的调节轴前端部安装调长组件;隔离柱上还设有连通腔和连通孔道,通过连通腔和连通孔道将圆柱孔的压力传递连通到运动腔中,进而驱动调长组件带动调节轴旋转运动,进而带动调节板和传动杆件的向前端移动实现伸长。
12、所述的调长组件包括环轴套、磁性材料的异形杆、环形磁铁、拉杆机构和挡台;环轴套可轴向活动和旋转地套装在末端段上,环形磁铁固定套装于调节轴的末端段的末端上,环轴套顶部周面上固定设置有径向向上布置的异形杆;调节轴的末端段末端的运动腔顶部一侧固定设有一个挡台,异形杆位于挡台侧方,另一侧设置用于拉杆机构布置和运动的拉杆空间,拉杆空间内部布置拉杆机构,拉杆机构一端可活动地插装在壳体上,并经连通腔和连通孔道连通于圆柱孔;面朝拉杆机构和拉杆空间的挡台侧端面设置为竖直平面,挡台内部设置用于磁性排斥拉杆机构和磁性吸附异形杆的方形磁铁;所述的调节轴的离合段的直径大于末端段的直径,调节轴的末端段和离合段之间形成台阶面,所述台阶面和环轴套后端面上设置有相互离合配合的离合面,使得所述台阶面和环轴套后端面在相互紧贴接触情况下形成同轴旋转地啮合配合连接。
13、所述的拉杆机构包括往复杆、磁铁块、第一卡爪、第二卡爪和扁平磁铁;往复杆一端固定安装有用于磁性吸附第一卡爪的磁铁块,往复杆一端通过水平的销轴铰接安装有第一卡爪,使得第一卡爪能上下摆动旋转;第一卡爪一侧通过竖直的销轴铰接连接有第二卡爪,第一卡爪和第二卡爪之间形成卡爪夹持结构,第二卡爪能水平左右摆动旋转;第一卡爪内部嵌装有用于和方形磁铁磁性排斥配合的扁平磁铁;在拉杆机构的往复杆所伸入的壳体内旁嵌装有一个用于拉杆机构复位的复位磁铁;所述第二卡爪根部和第一卡爪铰接,且第二卡爪在靠近根部处固定连接支撑凸耳的一端,支撑凸耳的另一端经弹簧和第一卡爪的中部连接,使得在弹簧作用下,支撑凸耳的另一端顶接于第一卡爪的侧面,从而常态下第二卡爪向第一卡爪靠拢保持夹持姿态;常态下第二卡爪和第一卡爪之间具有宽度小于异形杆外径的、用于夹持异形杆的夹持间隙;所述第一卡爪末端靠近第二卡爪的角通过斜切加工形成斜楔面,所述的斜楔面用于配合和异形杆接触、并带动异形杆向后向移动;所述的第一卡爪根部和往复杆铰接,第一卡爪根部在靠近磁铁块处设置有局部的磁性件或者磁性材料,磁性件或者磁性材料和磁铁块相互吸引提供第一卡爪和第二卡爪整体摆动旋转复位力。
14、所述的拉杆空间在远离挡台的一侧运动腔腔壁上设置伸长运动孔道,拉杆机构的往复杆密封可轴向活动地插装于伸长运动孔道的一端中,伸长运动孔道另一端经隔离柱上的连通腔和连通孔道连通于圆柱孔;所述隔离柱上的连通腔和连通孔道具体包括伸长连通腔、气孔和伸长连通孔道,在隔离柱处的圆柱孔孔壁还设有环形的伸长连通腔,隔离柱在隔离柱内腔侧壁上开设气孔,使得隔离柱内腔经气孔和伸长连通腔连通,伸长连通腔经壳体内部开设的伸长连通孔道和伸长运动孔道一端连通,伸长运动孔道另一端和拉杆空间连通。
15、所述的异形杆主要由粗杆、细杆、定位块构成,粗杆和细杆分别上下同轴布置,粗杆用于和拉杆机构配合被带动运动,细杆下端固定于环轴套上,粗杆底端和细杆之间固定设置有一个径向布置的定位块;所述拉杆机构中第二卡爪在靠近根部处加工出一个通槽作为方形空位槽,方形空位槽用于和异形杆的定位块配合。
16、本发明通过机械结构、容腔、气体和流体的巧妙设计和配合,能够帮助机器人实现以下功能,包含有益效果为:(1)当外部接触面轻微倾斜时,执行器可以自动调整并顺应其倾斜面;(2)当外部接触面严重倾斜时,执行器设定了快速泄压、快速溃缩的变形功能;(3)当执行器偏长时,机械结构可以自动缩短执行器的长度;(4)当执行器偏短时,机械结构可以自动调长执行器的长度。本发明可以自动调整每个执行器的长度,既可以自动调短、又可以自动调长、还可以自动适应台面的倾斜度;有效解决了机器人在昏暗环境下,在倾斜台面上的降落问题。本发明所有调节功能均由机械结构自动实现,全部依托机械式方案,无需人工干预,无需外置动力源,结构独立、应用性强。
- 还没有人留言评论。精彩留言会获得点赞!