一种可支持TSN网络技术的机器人边缘控制系统的制作方法
本发明涉及移动机器人控制,尤其涉及一种可支持tsn(时间敏感网络)网络技术的机器人边缘控制系统。
背景技术:
1、在智能制造领域,移动复合机器人正逐渐进入生产系统,成为整个工厂生产系统的一员。而移动复合机器人的性能、工作可靠性、实时性、安全性、作业时的动作响应速度等都是影响生产效率和整体生产线安全的重要因素。
2、现有技术条件下,当多台机器人尤其是复合机器人运行于同一工业场景中时,通过无线通信技术,如5g网络,在机器人和调度系统之间建立数据连接,以完成机器人运行数据的上传及接收来自调度系统的指令数据。因此,5g数据通信的可靠性会影响机器人的运行情况,甚至安全性。如何提高5g通信数据的可靠性是一个问题。
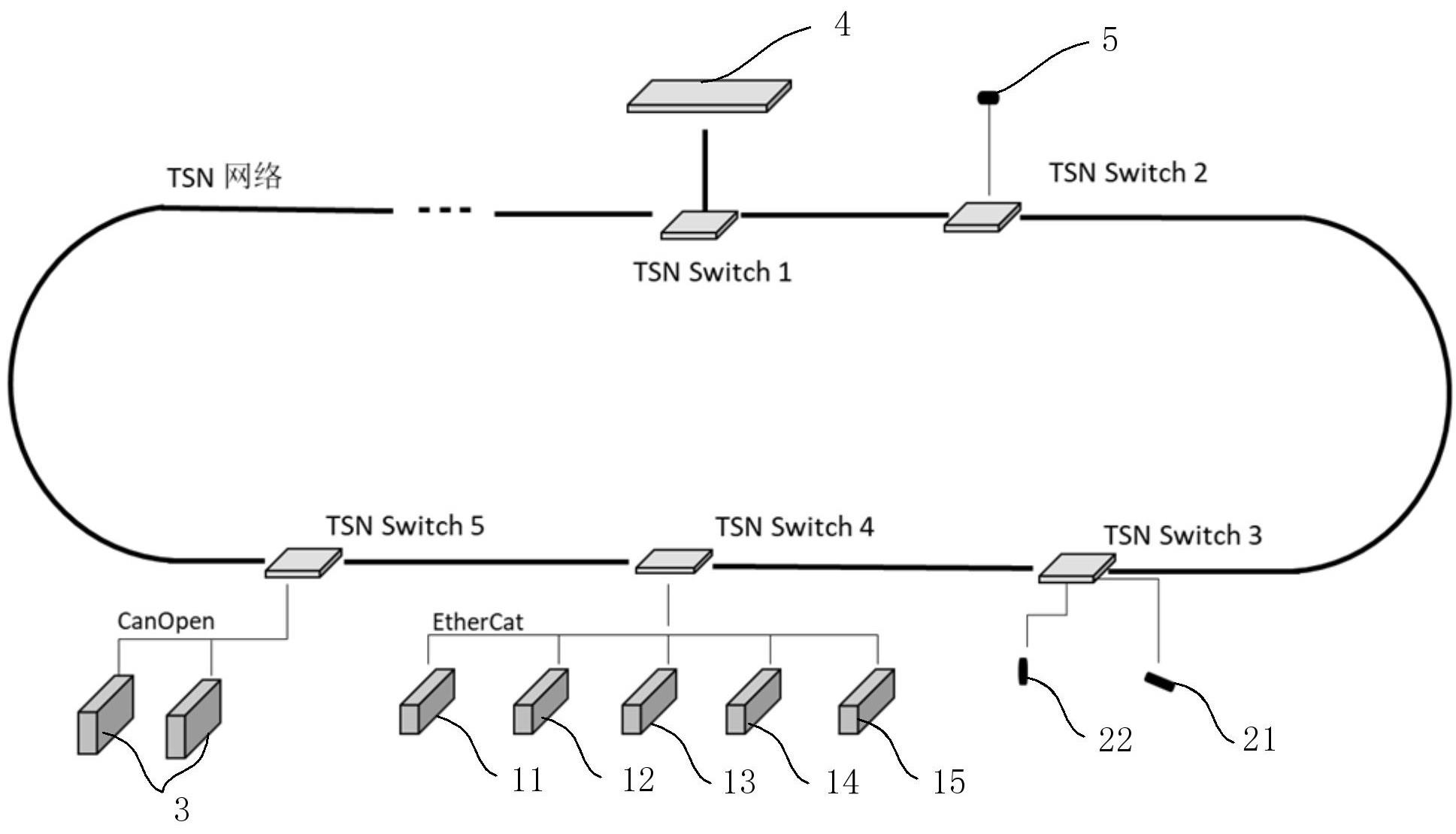
3、另外,现有技术条件下,机器人内部存在着多种类型的部件,如各类传感器、机械臂关节的驱动器、移动底盘轮毂的驱动器等等,这些部件产生数据并反馈至机器人控制器,以使机器人控制器据此进行相应的控制或做出决策。这些数据信息的传输依赖于各种不同的通信形式,如轮毂驱动器的canopen通信,机械臂关节的ethercat通信,传感器(如激光雷达)的以太网通信等,多种通信方式共存于机器人控制系统中,不仅导致线束复杂,还造成系统复杂,数据处理及接口复杂,从而降低可靠性;同时还存在着时延、数据传输时间周期等非确定性问题。
4、还有,机器人本体控制器不仅承担了对机器人本体集成的各类传感信号的获取及处理,还要对各控制部件进行控制,同时要进行综合计算以便进行导航、避障等智能化功能的实现,这就对机器人本体的控制器的运算能力提出了很高的要求,这对单一机器人的成本产生压力;当多机器人运行于同一场景中时,基于同一场景及各机器人感知数据,如果能集中进行处理并运行人工智能算法,从而为单体机器人的运行提供智能数据,则不仅于成本方面考虑有好处,而且能够更好的实现群体智能,使群体机器人共同运行智能化程度更高。
5、因此,需要提供一种技术方案,既能解决机器人本体内部多种通信方式共存引起的可靠性问题,或线束繁多的问题,或通信数据同步性和确定性不足的问题,又能解决机器人与调度系统无线通信可靠性的问题,还能为机器人提供更好的智能控制数据。
技术实现思路
1、针对上述现有技术的不足,本发明提供一种可支持tsn网络技术的机器人边缘控制系统,以解决机器人本体内部多通信总线共存时减少线束的问题,以及增强无线通信方式的可靠性和数据传输同步性、确定性的问题,以及机器人智能运算功能造成单体机器人算力成本过高的问题。
2、为了实现上述目的,本发明采用以下技术方案:
3、一种可支持tsn网络技术的机器人边缘控制系统,包括边缘控制器以及位于目标场景下的多个机器人;
4、所述机器人包括机器人控制器以及若干驱动模块、传感器模块及无线通信模块,其中,所述机器人控制器、驱动模块、传感器模块及无线通信模块通过若干设置于所述机器人内部的tsn交换机模块进行组网连接以形成tsn网络,同时各所述机器人的机器人控制器还通过设置于所述边缘控制器侧的tsn交换机模块与所述边缘控制器进行组网连接,且所述边缘控制器侧的tsn交换机模块能够支持tsn技术与所述无线通信模块所采用的无线通信技术相融合的通信方式;
5、其中,所述边缘控制器用于接收各机器人的所述驱动模块反馈的运动数据、以及所述传感器模块采集的传感器数据,并基于各所述运动数据及所述传感器数据获取整个所述目标场景对应的场景感知数据,而后基于所述场景感知数据获取每个所述机器人对应的目标感知数据。
6、进一步地,所述无线通信模块为5g通信模块,所述边缘控制器侧的tsn交换机模块能够支持tsn技术与5g通信技术相融合的通信方式。
7、进一步地,所述tsn交换机模块包括:tsn交换机、以及与所述tsn交换机连接的若干数据接口和以太网接口,其中,所述数据接口和以太网接口分别通过tas与所述tsn交换机通信连接。
8、进一步地,所述驱动模块包括关节驱动模块和轮毂驱动模块。
9、进一步地,所述机器人控制器包括控制主板及运动控制模块;
10、所述机器人内部设置的若干所述tsn交换机模块包括第一tsn交换机模块、第二tsn交换机模块、第三tsn交换机模块、第四tsn交换机模块以及第五tsn交换机模块;
11、所述关节驱动模块与所述第一tsn交换机模块连接;
12、所述轮毂驱动模块与所述第二tsn交换机模块连接;
13、所述传感器模块与所述第三tsn交换机模块连接;
14、所述无线通信模块与所述第四tsn交换机模块连接;
15、所述第一tsn交换机模块及第二tsn交换机模块与所述运动控制模块连接;
16、所述第三tsn交换机模块及第四tsn交换机模块与所述第五tsn交换机模块连接,且所述运动控制模块通过所述第五tsn交换机模块与所述控制主板连接。
17、进一步地,所述机器人控制器、所述无线通信模块、所述传感器模块、所述关节驱动模块及所述轮毂驱动分别连接至所述机器人内部的不同所述tsn交换机模块,其中,不同所述tsn交换机模块组网形成环形的tsn网络。
18、进一步地,所述轮毂驱动模块及所述关节驱动模块均集成有支持tsn网络的tsn网络接口,所述机器人控制器集成有tsn交换机功能,所述传感器模块及无线通信模块连接至所述机器人内部的tsn交换机模块,其中,所述机器人内部的tsn交换机模块、所述轮毂驱动模块、所述关节驱动模块以及所述机器人控制器组网形成线性的tsn网络。
19、进一步地,所述tsn交换机模块按固定周期,将经过的数据流分成高优先级数据流和尽力而为数据流,并在每个所述周期内先传输完所述高优先级数据流后,再传输所述尽力而为数据流;
20、其中,全部所述tsn交换机模块的周期相同;或者,
21、所述机器人内部的各tsn交换机模块的周期相同,所述边缘控制器侧的tsn交换机模块的周期与所述机器人内部的tsn交换机模块的周期呈整数倍关系。
22、进一步地,所述边缘控制器包括:
23、数据接收及解析模块,用于接收各所述驱动模块反馈的运动数据及各所述传感器模块采集的传感器数据并进行解析;
24、全场景感知ai学习模块,用于基于解析后的数据获取整个所述目标场景的场景感知数据,并基于所述场景感知数据获取每个所述机器人对应的目标感知数据。
25、进一步地,所述传感器模块包括激光雷达传感器模块及视觉传感器模块;
26、所述全场景感知ai学习模块包括:
27、场景融合单元,用于获取所述目标场景对应的点云地图,并将各机器人作为动态点位嵌入所述点云地图中,而后基于各机器人的所述激光雷达传感器模块采集的传感器数据、以及各机器人的所述驱动模块反馈的运动数据,更新所述点云地图,并基于更新的所述点云地图确定整个所述目标场景对应的场景感知数据;
28、多个ai学习算法单元,分别用于对各机器人周围的所述场景感知数据进行学习训练,以得到各机器人的单体感知数据,并将各机器人的单体感知数据分别与对应机器人的所述视觉传感器模块采集的传感器数据进行融合计算,以得到各机器人最终的目标感知数据。
29、进一步地,所述边缘控制器包括gpu及cpu;
30、所述数据接收及解析模块、所述场景融合单元运行于cpu上;
31、所述ai学习算法单元运行于gpu上。
32、进一步地,各所述机器人的机器人控制器还通过所述tsn交换机模块与一机器人群控调度系统进行组网连接;所述边缘控制器为所述机器人群控调度系统的子系统、或者独立于所述机器人群控调度系统设置。
33、进一步地,所述边缘控制器包括机器人控制算法模块,所述机器人控制算法模块用于:依据所述机器人群控调度系统下发的任务指令生成各所述机器人对应的运动控制指令,并通过所述tsn交换机模块下发至相应的机器人。
34、通过采用上述技术方案,本发明带来如下有益效果:
35、本发明通过组网建立tsn网络,能够在机器人本体内部多通信总线共存时减少线束。同时由于tsn网络具有全局时间同步和确定性传输特征,因而本发明中机器人内部各功能模块(如驱动模块、传感器模块等)之间的时间同步;且,该同步与其他机器人的时间同步;且,均同步于边缘控制器。从而,实现了从机器人最底层到整个外部边缘网络,到边缘控制器之间的时间同步;也实现了tsn技术固有的数据传输确定性的目的。可见,本发明组成了完整而彻底的实时通信架构。这种实时架构的组成,使数据从边缘控制器到机器人控制器再到机器人内部数据流;或者反之,实现了数据传输的同步和确定性。
36、此外,边缘控制器的作用为获取各机器人的所述驱动模块反馈的运动数据、以及所述传感器模块采信的传感器数据,并基于各所述运动数据及所述传感器数据获取整个目标场景对应的场景感知数据,而后将所述场景感知数据分解为每个所述机器人对应的目标感知数据。这一处理过程如果由任一单体机器人控制器完成,势必引起该控制器运算资源紧张,因此,本发明设置了边缘控制器,集中所有机器人的传感器数据和运动数据进行综合计算,既降低了对机器人控制器的计算资源的要求,同时也极大程度上避免了因某单体机器人的传感器数据错误(如传感器故障)等原因引起的感知错误,在整体感知数据中,对某单体机器人的感知错误敏感度极大降低,因此提高了可靠性。
- 还没有人留言评论。精彩留言会获得点赞!