应力状态处理方法、装置、设备及可读存储介质
本技术涉及机器人技术,尤其涉及一种应力状态处理方法、装置、设备及可读存储介质。
背景技术:
1、可抓物的机器人在日常生产生活中应用广泛,但机器人抓手的抓物能力受到物体重量的限制,抓取超重的物体,会对机器人的抓手的硬件结构造成损伤,引起机器人故障。因此,需要对机器人抓手的应力状态进行监测、分析。
2、物体的应力状态可以由物体的应力值、应变值和位移值等应力参数来表征。现有技术中,通常是基于搭建的机器人抓手的数字孪生模型,利用有限元分析软件,人工配置机器人抓手的材料属性、重力、边界条件等有限元分析参数后,获取该机器人抓手的应力参数,即可获取到该机器人抓手的应力状态。
3、但该方式需要人工配置机器人抓手的有限元分析参数,并且有限元分析软件输出应力参数所需的时间较长,即,现有技术中对应力状态的处理效率较低。
技术实现思路
1、本技术提供一种应力状态处理方法、装置、设备及可读存储介质,能够提高应力状态的处理效率。
2、第一方面,本技术提供一种应力状态处理方法,包括:
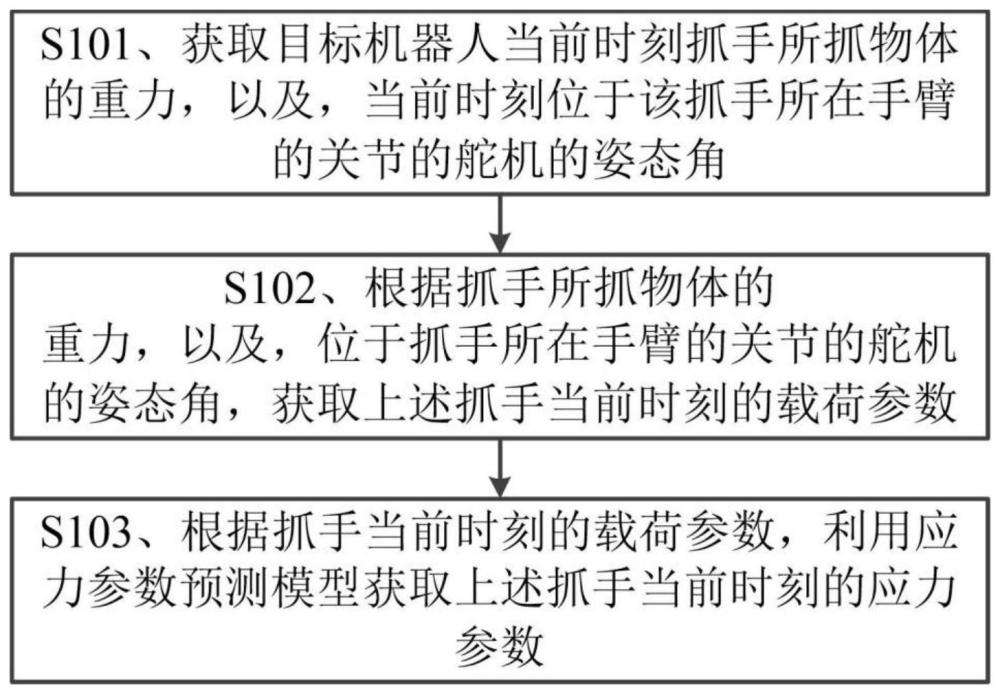
3、获取目标机器人当前时刻抓手所抓物体的重力,以及,当前时刻位于所述抓手所在手臂的关节的舵机的姿态角;
4、根据所述重力,以及,位于所述抓手所在手臂的关节的舵机的姿态角,获取所述抓手当前时刻的载荷参数;所述载荷参数用于表征所述抓手抓取所述物体时受到的应力;
5、根据所述载荷参数,利用应力参数预测模型获取所述抓手当前时刻的应力参数;所述应力参数用于表征所述抓手当前时刻的应力状态;所述应力参数预测模型为基于样本机器人的样本载荷参数以及对应的样本应力参数训练得到的;所述应力参数包括所述抓手的点坐标,以及该点的应变值、应力值和位移值。
6、可选的,所述抓手包括第一夹持部和第二夹持部;所述根据所述重力,以及,位于所述抓手所在手臂的关节的舵机的姿态角,获取所述抓手当前时刻的载荷参数,包括:
7、根据所述抓手对应关节的舵机的姿态角,获取第一角度,所述第一角度为所述抓手平面与水平面的夹角;
8、根据所述重力、位于所述抓手所在手臂的关节的舵机的姿态角,以及,所述第一角度,获取所述第一夹持部在当前时刻的载荷参数,以及,所述第二夹持部在当前时刻的载荷参数。
9、可选的,所述载荷参数包括:所述抓手坐标系下第一坐标轴方向上的力、第二坐标轴方向上的力,以及,第三坐标轴方向上的力;所述第一坐标轴方向为所述抓手的轴线方向,所述第二坐标轴方向为垂直于所述抓手平面方向,所述第三坐标轴方向为所述抓手平面方向;
10、所述根据所述重力、位于所述抓手所在手臂的关节的舵机的姿态角、所述第一角度,获取所述第一夹持部在当前时刻的载荷参数,以及,所述第二夹持部在当前时刻的载荷参数,包括:
11、根据所述重力、位于所述抓手所在手臂的关节的舵机的姿态角,获取所述第一夹持部当前时刻在所述第一坐标轴方向上的力,以及,所述第二夹持部当前时刻在所述第一坐标轴方向上的力;
12、根据所述重力、位于所述抓手所在手臂的关节的舵机的姿态角,以及,第一角度,获取所述第一夹持部当前时刻在所述第二坐标轴方向上的力,以及,所述第二夹持部当前时刻在所述第二坐标轴方向上的力;
13、根据所述第一角度,获取所述第一夹持部与所述第二夹持部的位姿关系;
14、根据所述位姿关系对应的第三坐标轴方向上的力的获取方式、所述重力、位于所述抓手所在手臂的关节的舵机的姿态角,以及,第一角度,获取所述第一夹持部当前时刻在所述第三坐标轴方向上的力,以及,所述第二夹持部当前时刻在所述第三坐标轴方向上的力。
15、可选的,所述获取所述目标机器人当前时刻抓手所抓物体的重力,以及,当前时刻位于所述抓手所在手臂的关节的舵机的姿态角,包括:
16、接收所述目标机器人上报的当前时刻抓手所抓物体的重力,以及,当前时刻位于所述抓手所在手臂的关节的舵机的姿态角。
17、可选的,所述根据所述载荷参数,利用应力参数预测模型获取所述抓手当前时刻的应力云图,包括:
18、获取所述目标机器人的类型;
19、根据所述目标机器人的类型,从应力参数预测模型库中获取所述类型对应的目标应力参数预测模型;
20、根据所述载荷参数,利用所述目标应力参数预测模型获取当前时刻的应力云图。
21、可选的,所述方法还包括:
22、基于所述抓手在多个时刻的应力参数,生成所述抓手的应力状态云图;所述应力状态云图包括位移云图、应变云图、应力云图中的至少一种;
23、展示所述应力状态云图。
24、可选的,所述基于所述抓手在多个时刻的应力参数,生成所述抓手的应力状态云图之后,所述方法还包括:
25、基于所述抓手在多个时刻的应力状态云图,生成所述抓手的应力状态云图动画;所述应力状态云图动画为位移云图、应变云图、应力云图中的一种,用于展示所述抓手在不同姿态角下的应力状态;
26、展示所述应力云图动画。
27、第二方面,本技术提供一种应力状态处理装置,包括:
28、第一获取模块,用于获取目标机器人当前时刻抓手所抓物体的重力,以及,当前时刻位于所述抓手所在手臂的关节的舵机的姿态角;
29、第二获取模块,用于根据所述重力,以及,位于所述抓手所在手臂的关节的舵机的姿态角,获取所述抓手当前时刻的载荷参数;所述载荷参数用于表征所述抓手抓取所述物体时受到的应力;
30、第三获取模块,用于根据所述载荷参数,利用应力参数预测模型获取所述抓手当前时刻的应力参数;所述应力参数用于表征所述抓手当前时刻的应力状态;所述应力参数预测模型为基于样本机器人的样本载荷参数以及对应的样本应力参数训练得到的;所述应力参数包括所述抓手的点坐标,以及该点的应变值、应力值和位移值。
31、第三方面,本技术提供一种电子设备,包括:处理器,以及与所述处理器通信连接的存储器;
32、所述存储器存储计算机执行指令;
33、所述处理器执行所述存储器存储的计算机执行指令,以实现如第一方面中任一项所述的应力状态处理方法。
34、第四方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如第一方面任一项所述的应力状态处理方法。
35、第五方面,本技术提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现如第一方面任一项所述的应力状态处理方法。
36、第六方面,本技术提供一种芯片,所述芯片上存储有计算机程序,所述计算机程序被所述芯片执行时,实现如第一方面任一项所述的应力状态处理方法。
37、本技术提供的应力状态处理方法、装置、设备及可读存储介质,基于当前时刻抓手所抓物体的重力,以及,当前时刻位于所述抓手所在手臂的关节的舵机的姿态角,获取到该抓手当前时刻的载荷参数,并利用训练好的应力参数预测模型,根据获取到的抓手的载荷参数,获取该载荷参数对应的当前时刻抓手的应力参数,进而获取到抓手当前时刻的应力状态。通过该方法,可以根据抓手所抓物体的重力,当前时刻位于所述抓手所在手臂的关节的舵机的姿态角,以及,训练好的应力参数预测模型,即可获取到当前时刻抓手的应力参数(应力状态),减少了待人工配置参数的数量,且利用应力参数预测模型获取应力状态的速度快,提高了应力状态的处理效率。
- 还没有人留言评论。精彩留言会获得点赞!